 如如何讓四旋翼飛行器在一個執行器損壞后繼續飛行呢
如如何讓四旋翼飛行器在一個執行器損壞后繼續飛行呢

簡介
多旋翼飛行器的安全問題一直伴隨著多旋翼飛行器。尤其是對于四旋翼飛行器而言,單個旋翼的突然失效往往是致命的,不可恢復的。從2010左右就開始有大量的文章開始研究如何讓四旋翼飛行器在一個執行器(旋翼損壞、電機停轉、電調故障)完全損壞后繼續飛行而不至于失去控制。很多控制方法被應用到了四旋翼無人機的容錯控制研究中,并且取得了不錯的效果。
然而,所有針對四旋翼飛行器單個執行器完全失效的控制策略均采用了放棄飛行器的偏航控制使其自由旋轉,從而獲得另外一種定義下的穩定性,也就是放棄偏航通道下的穩定性。說到底,四旋翼飛行器在一個旋翼完全失效的情況下,只能通過自身的高速旋轉來維持自身的平衡。
那么說到旋轉,我們是否能想到曾經或者現在依舊被人熟知的陀螺呢?該文章從這里入手,分析了四旋翼飛行器在執行器完全失效的情況下的哪些因素可以影響其旋轉的特性,以及如何通過這些特性來提高容錯控制系統的魯棒性。
另外本文通過動態控制分配實現了不同故障程度的無縫銜接,即某個執行器從健康到部分失效以及完全失效完全是在唯一的控制器和控制參數下實現的,不需要針對不同故障進行不同的控制器切換或者參數切換。文章最后通過半物理仿真和戶外真機實驗進行了驗證。
一、控制器設計
如圖1所示,控制器分為了七個部分。具體的控制器詳細設計可以參看我們的論文。這里主要說下各部分的作用。
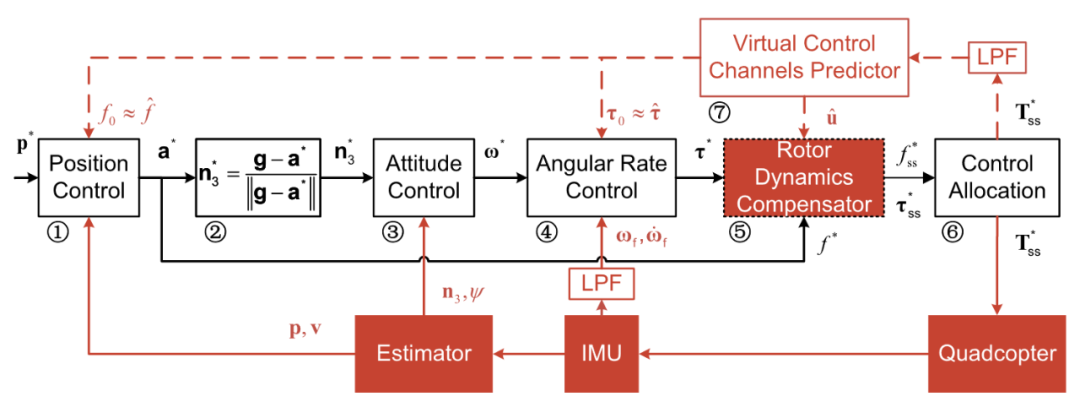
圖1 控制器框圖
圖中①和②是位置環的部分,作用是通過期望的位置計算出機體期望的主軸,這里提到的主軸是機體坐標系的Z軸。圖中③和④是姿態環部分,負責根據期望的主軸來得到期望的角速率,從而進一步得到期望的力矩,以及拉力。圖中⑤和⑦主要用于提高控制系統的響應速度,原因是考慮到了電機(執行器)本身的動態過程。
最后是⑥動態控制分配,在控制分配中我們為每個控制通道設置了不同的優先級。其中橫滾俯仰通道的優先級最高,其次是力通道,最后是偏航通道,這樣控制分配會優先保證飛行器控制俯仰和滾轉的實現,在遇到執行故障的時候,則會自動優化實現對偏航通道的放棄,這時飛行器會逐漸進入穩定的旋轉狀態。
圖2展示了單個旋翼逐漸失效后的容錯控制效果,其中在位于20s、40s、60s和80s的時候,單個旋翼的拉力分別被乘以系數0.6、0.4、0.2和0。可以看出,在不同故障程度下,隨著對于偏航通道控制能力的降低,機體的旋轉速度逐漸提升。
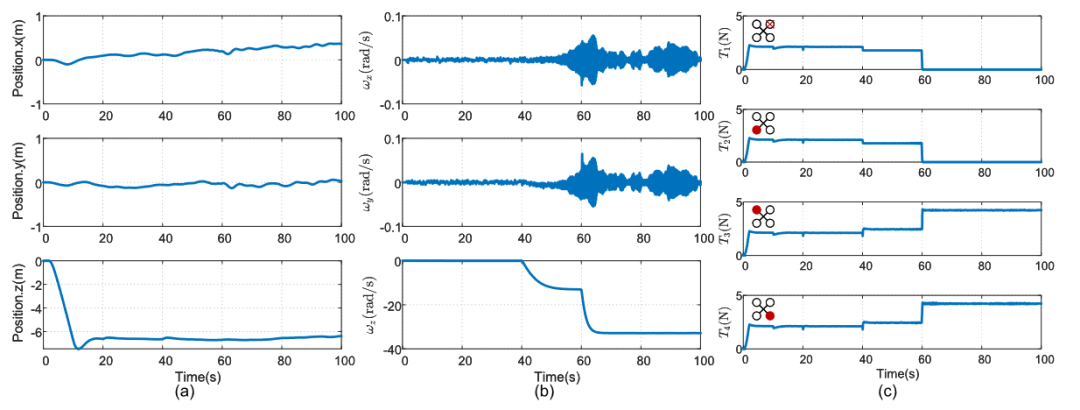
圖2 單個旋翼逐漸失效的容錯控制效果
二、模型參數對可控度的影響
相信很多同學在小時候都玩過抽陀螺的游戲,只要陀螺能夠保持足夠大的轉速,即使我們使用鞭子進行抽打它也會在傾斜后自動回到原有旋轉的姿態。同時當它的轉速逐漸減小后,其主軸的傾斜程度就會逐漸提高,最后隨著轉速下降而倒下,如圖3所示,主軸和垂直軸存在一個夾角,通常其轉速變慢,該夾角會越來越大并最終不再穩定。
學過慣性導航的同學其實都知道,陀螺的穩定性與陀螺旋轉的進動性密切相關。其中轉速的大小起到了非常重要的作用。這點與四旋翼飛行器失效后依靠旋轉速維持可控性的特點非常相似。
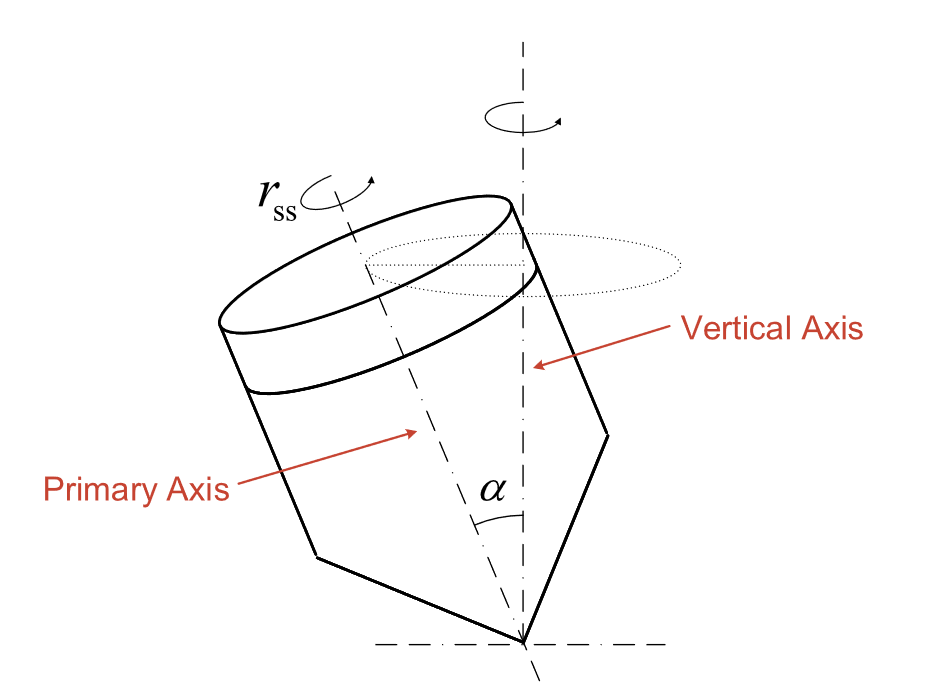
圖3 陀螺運動示意圖
通過對線性化的四旋翼旋轉時的運動模型分析其可控性,可知只要其Z軸轉速不為0,那么就是可控的。但是直覺告訴我們,如果轉速足夠小,四旋翼實際上是很難實現控制的。為此我們采用了可控度這一項來分析機體轉速對于可控度的影響。可控度指標是對于可控系統的量化描述,可控度越高說明其達成控制目標所需要的能量或者說難度越低。
根據圖5第一幅圖所示,機體轉速越高其可控度越好,就越容易實現機體的穩定旋轉控制。當然這是理論上的結果,實際上還需要考慮控制器性能上的約束。雖然轉速足夠高可以提高可控度,但是過高的轉速使得系統動態范圍的提高,這個時候需要更加高頻的控制器才能滿足控制需要,我們的控制器在實驗和仿真中運行在400Hz的頻率上。
同時我們還對四旋翼剛體模型中的角動量耦合項的作用進行了可控度分析。如圖4所示,我們通過疊加其耦合項分析了其對于旋轉剛體的可控度的影響,分析表明增加耦合項的作用也可以提高其可控度(圖5中第三幅圖),降低執行器的能量輸出。
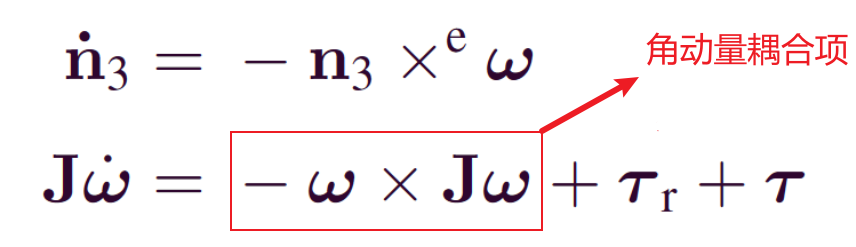
圖4 剛體運動模型中的角動量耦合項
與此同時圖5中的第二幅圖給出了機體的空氣阻尼力矩系數可控度的影響,其空氣阻尼越大,可控度越小。
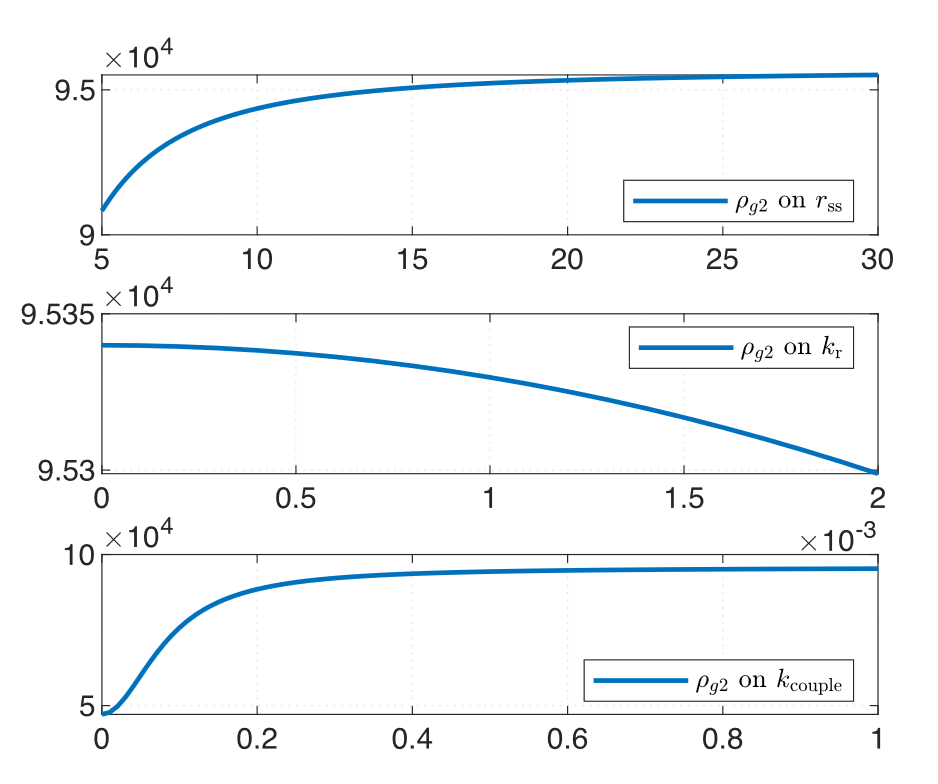
圖5 可控度指標
文中,我們在控制器中人為增加了角動量耦合項來仿真驗證了其對容錯控制的影響。如圖6所示,其中kcouple數值越大表示在控制器中疊加了更多的角動量耦合項。從圖6中可以看出,增加kcouple后,主軸的響應速度和位置控制的精度都得到了提升。(其中h3表示機體主軸的第三個分量,在飛行器懸停的情況下h3=1)
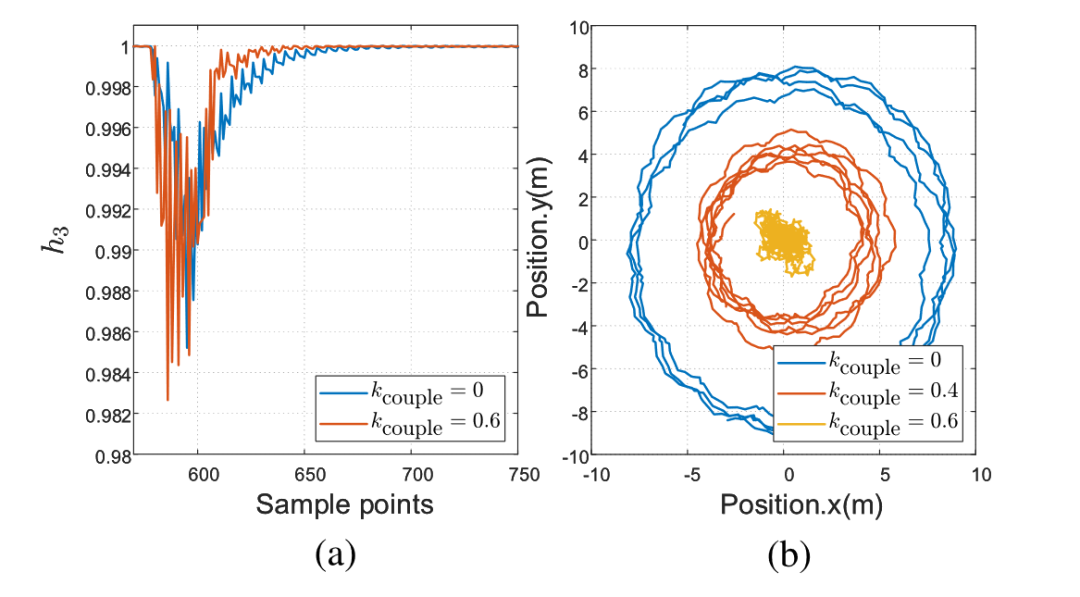
圖6 角動量耦合項對控制的改善效果
三、仿真和實驗展示
實驗過程中,單個旋翼故障首先被設置為了失效一半的狀態,之后被設置為了完全的失效狀態。根據前面的可控度分析,實驗中設置了kcouple=0.6用于改善控制器的性能,事實上在設置kcouple=0的情況下,容錯控制器難以進行長時間的穩定懸停。
控制算法基于我們實驗室的RflySim平臺將基于Simulink設計的容錯控制器進行代碼生成并下載到Pixhawk 4飛控中,固件基于PX4 v1.11,控制器運行頻率400Hz,估計系統采用PX4自身的LPE(即姿態互補濾波+位置卡爾曼濾波),并且估計系統也需要設置為400Hz運行。電機控制信號使用的是Oneshot125協議。
圖7給出了一次戶外容錯控制實驗的實驗數據,由上到下分別展示了機體的力矩、優化迭代次數、機體主軸的動態過程、機體角速率和故障切換過程即旋翼的健康程度從1降為0.5再降為0. 該控制器在單個旋翼完全失效的情況下依舊能能夠實現長時間的穩定飛行,給安全降落留下了寶貴的時間。
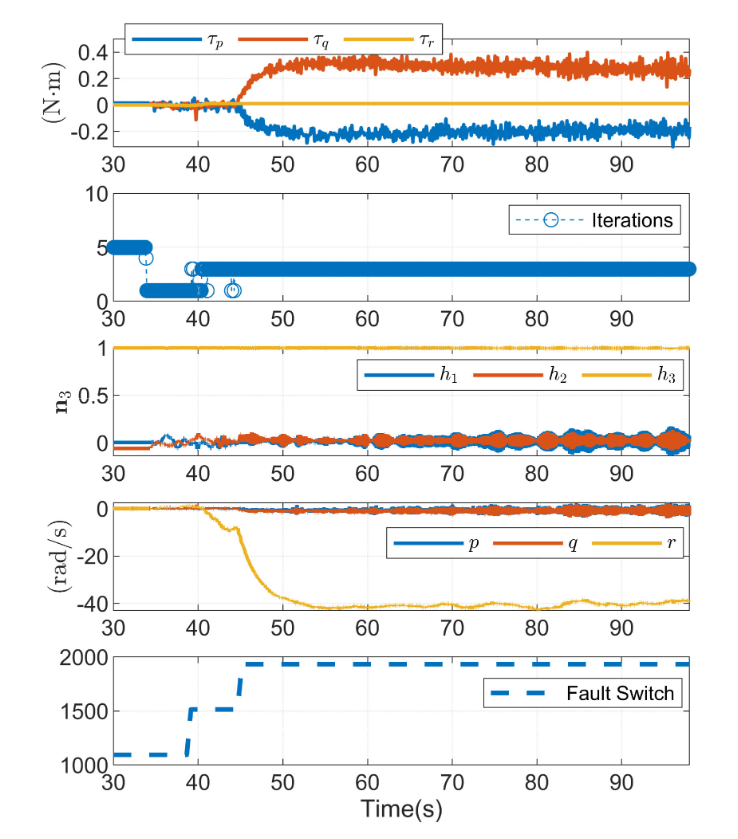
圖7 戶外實驗數據
Tip 1:如何設置PX4 濾波器估計頻率
Tip 2:為了解決四旋翼旋轉過程中角速率過大超出IMU(陀螺儀)量程的問題,我們采用了將飛控傾斜的辦法,間接提高了飛行器的機體Z軸角速率上限。(特此感謝趙海欣同學提出的寶貴建議)如圖 8所示:
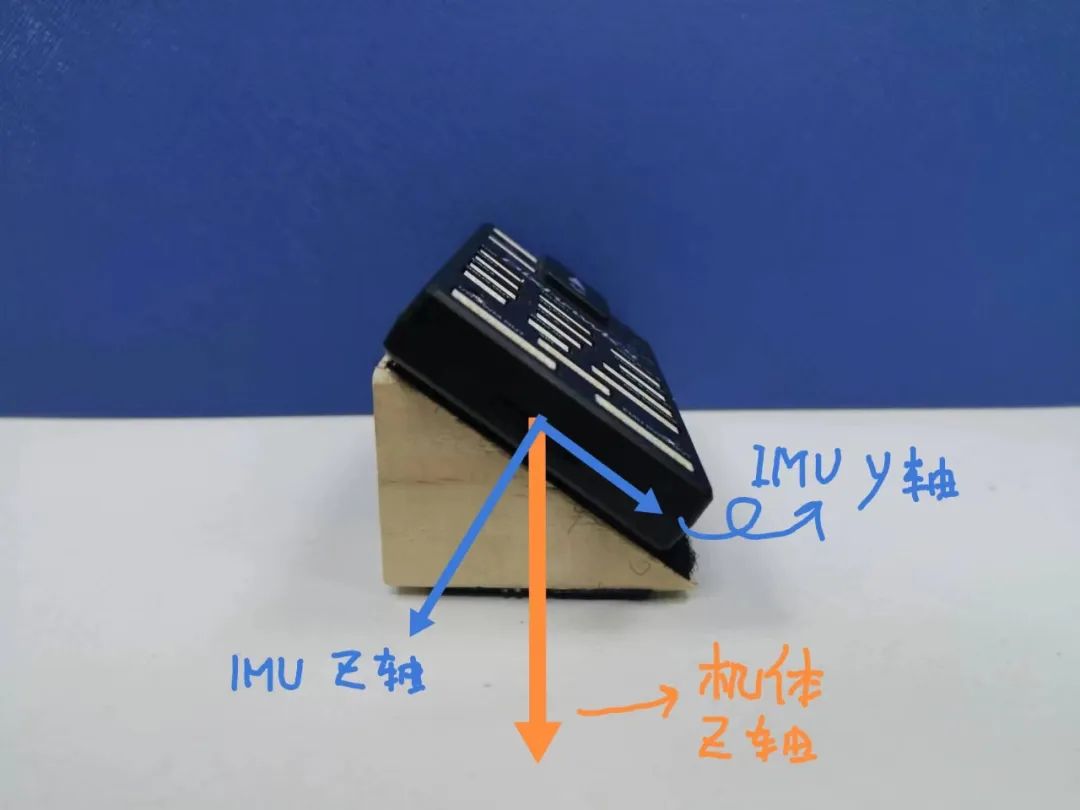
圖8 飛控安裝示意圖
四、總結
本文提出的四旋翼單個旋翼失效的容錯控制方法,一方面實現了不同故障程度的統一容錯控制不需要故障切換,另一方面受陀螺旋轉的特性的啟發,分析了機體Z軸角速率、角動量耦合項、空氣阻尼力矩系數對于系統可控度的影響。并且在最后進行了戶外的飛行實驗,實驗環境完全貼近真實場景,不依賴精確的室內光學定位等設備。該實驗中驗證了我們算法的穩定性以及增加模擬的角動量耦合項對于控制器魯棒性的提升效果。
審核編輯:劉清
-
控制器
+關注
關注
114文章
17787瀏覽量
193089 -
飛行器
+關注
關注
13文章
831瀏覽量
47685 -
執行器
+關注
關注
5文章
434瀏覽量
20547
原文標題:如何讓多旋翼無人機旋轉的更加優雅?
文章出處:【微信號:雨飛工作室,微信公眾號:雨飛工作室】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
芯片電感/半導體模組磁性元器件在低空飛行器領域的應用范圍及其作用
簡儀科技產品在低空飛行器風洞試驗數據采集設備中的應用

低空飛行器(如eVTOL、物流無人機、城市空中交通飛行器)的適航認證

雷達吸波結構(RAS) --讓飛行器披上隱形斗篷的科技魔法

第四屆飛行器健康管理技術國際高端論壇暨青年科學家論壇:昊衡科技,歡迎您來!


深圳反重力科技純電動單人智能飛行器完成首次試飛
直線旋轉執行器 vs 傳統執行器:優勢差異究竟在哪里??
廣汽高域復合翼飛行汽車GOVY AirJet正式獲頒特許飛行證 無人駕駛航空器特許飛行證

eVTOL低空飛行器電機為什么要用自粘結鐵芯方案?
CCLINKIE轉PROFINET:讓執行器“絲滑”入網!
小馬哥STM32F1主控720空心杯四軸飛行器資料(包含源代碼和相關教程)
小型飛行器專用 AS-DR01模擬信號AI識別跟蹤模塊





 工商網監
工商網監
評論