") 四軸無人機(jī)是如何工作的?
四軸無人機(jī)是如何工作的?

四軸飛行器、無人機(jī)——無論怎么稱呼它們,這些小玩意兒都既迷人又好玩!對于喜歡DIY的人來說,組裝一架四軸飛行器絕對是一個很棒的項目。
但四軸飛行器究竟是如何工作的呢?它是如何飛行的?需要組裝哪些部件才能打造一架屬于自己的四軸飛行器?
一、四軸飛行器如何飛行?
本文將重點(diǎn)介紹四軸飛行器,但本文解釋的很多內(nèi)容也適用于其他配備四個以上螺旋槳的飛行器。因此,如果你正在構(gòu)建四軸飛行器,本文中的很多內(nèi)容也同樣適用。
在解釋四軸飛行器或任何多旋翼飛行器的工作原理之前,我們需要定義一些重要的概念——俯仰、偏航和滾轉(zhuǎn)。這些術(shù)語指的是飛行器在飛行過程中可以自由移動的三個維度。
俯仰——俯仰是指飛機(jī)機(jī)頭的上仰或下仰。可以把它想象成爬升或俯沖。
偏航——偏航指的是飛機(jī)機(jī)頭向左或向右轉(zhuǎn)動。可以簡單地理解為轉(zhuǎn)彎。
滾轉(zhuǎn)——要理解滾轉(zhuǎn),想象一下從飛機(jī)前部延伸到后部的一條軸線。飛機(jī)滾轉(zhuǎn)時,它就是以此為軸轉(zhuǎn)動。也可以將滾轉(zhuǎn)理解為傾斜。
四軸飛行器使用四個電機(jī)。其中兩個電機(jī)順時針旋轉(zhuǎn),另外兩個電機(jī)逆時針旋轉(zhuǎn)。同一軸上的電機(jī)旋轉(zhuǎn)方向相同,如圖所示。
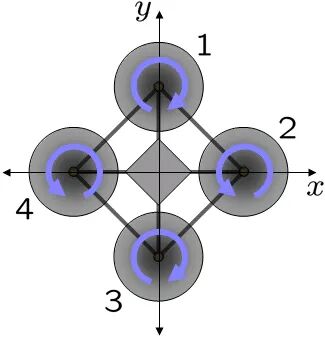
四軸飛行器旋翼旋轉(zhuǎn)方向
高度這個詞你可能很熟悉——它描述的是上升或下降。四軸飛行器可以懸停,也可以通過向四個旋翼施加相同的推力來調(diào)整高度。
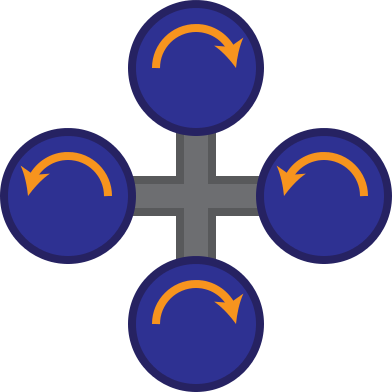
四軸飛行器懸停
為了調(diào)整偏航角(Yaw),也就是讓飛行器向左或向右轉(zhuǎn)動,四軸飛行器會向一組電機(jī)施加更大的推力。例如,四軸飛行器可能會向順時針旋轉(zhuǎn)的兩個電機(jī)施加更大的推力來實(shí)現(xiàn)轉(zhuǎn)彎。
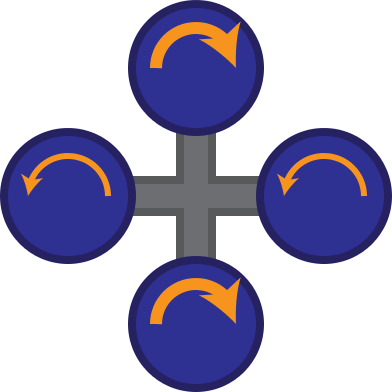
四軸飛行器偏航調(diào)整
另一方面,俯仰和滾轉(zhuǎn)的調(diào)整是通過在一個轉(zhuǎn)子上施加較大的推力,而在另一個轉(zhuǎn)子上施加較小的推力來實(shí)現(xiàn)的。例如,四軸飛行器可以通過向前方順時針旋轉(zhuǎn)的電機(jī)施加較大的推力,而向后方正對的順時針旋轉(zhuǎn)的電機(jī)施加較小的推力來調(diào)整俯仰。
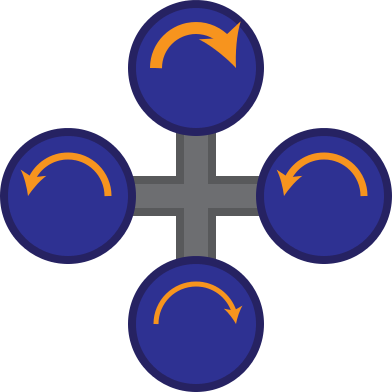
四軸飛行俯仰調(diào)節(jié)
四軸飛行器易于飛行的一個原因是實(shí)際上不必手動調(diào)整電機(jī)速度,因為這是控制器和電子設(shè)備發(fā)揮作用的地方。
二、電機(jī)
沒有電機(jī),四軸飛行器就飛不起來,所以選擇合適的電機(jī)至關(guān)重要。可惜的是,電機(jī)的規(guī)格有時會讓人困惑。
大多數(shù)四軸飛行器使用無刷直流電機(jī),盡管較便宜的四軸飛行器和微型直升機(jī)中的電機(jī)通常帶有刷子。
無刷電機(jī)由一個帶有永磁體的轉(zhuǎn)子和圍繞轉(zhuǎn)子的多個電磁鐵(也稱為極點(diǎn))組成。無刷電機(jī)的極點(diǎn)數(shù)從 2 到 14 個不等。極點(diǎn)數(shù)越多,電機(jī)的控制精度就越高。
無刷電機(jī)有三根電線,分別控制電機(jī)的三個相位。通過改變這些電線的連接方式,可以控制電機(jī)順時針或逆時針旋轉(zhuǎn)。
四軸飛行器電機(jī)的關(guān)鍵規(guī)格之一是其千伏 (KV) 額定值。KV 并非千伏,而是指在電機(jī)空載狀態(tài)下施加 1 伏電位差時,電機(jī)每分鐘的轉(zhuǎn)速 (RPM)。KV 也可以理解為每分鐘轉(zhuǎn)數(shù) (RPM)。四軸飛行器典型的 KV 額定值在 500 到 2500 之間。低 KV 電機(jī)可以驅(qū)動大型螺旋槳,從而產(chǎn)生更大的推力。
一般來說,重量超過 1 公斤的四軸飛行器會使用額定功率在 700 至 900 千伏之間的電機(jī)。重量在半公斤至 1 公斤之間的飛行器會使用額定功率在 900 至 1300 千伏之間的電機(jī)。重量低于 500 克的飛行器會使用額定功率在 1300 至 2200 千伏之間的電機(jī)。
電機(jī)的最大額定電流是另一個重要因素。在選擇電子調(diào)速器 (ESC) 和電池之前,需要知道這個以安培為單位的數(shù)值。
電機(jī)的額定推力與螺旋槳尺寸相關(guān)。這是一個重要的參數(shù),需要了解四軸飛行器的總重量,請記住,該重量包含電機(jī)本身的重量。
基本經(jīng)驗法則是,電機(jī)和螺旋槳的組合應(yīng)該能夠產(chǎn)生相當(dāng)于飛行器重量兩倍的推力。因此,對于擁有四個電機(jī)的四軸飛行器來說,這意味著每個電機(jī)應(yīng)該能夠提供相當(dāng)于整架飛行器重量一半的推力。換句話說,一架1公斤重的四軸飛行器需要四個電機(jī),每個電機(jī)至少能夠產(chǎn)生半公斤的推力。
另一個重要的電機(jī)規(guī)格是軸的直徑。這很重要,因為它決定了能用哪種螺旋槳與電機(jī)匹配。
還需要查看安裝螺釘模式和電機(jī)支架,以確保電機(jī)能夠成功安裝到四軸飛行器的框架上。
三、螺旋槳
直徑和螺距是螺旋槳的兩個基本規(guī)格。螺旋槳通常以套裝形式出售,套裝中包含2個順時針螺旋槳和2個逆時針螺旋槳。
螺旋槳的直徑和螺距多種多樣,材質(zhì)可以是塑料、碳纖維,甚至是木材。直徑小于 8 英寸的小型螺旋槳通常與高千伏電機(jī)配合使用,用于競賽和特技飛行。直徑超過 8 英寸的螺旋槳通常與低千伏電機(jī)配合使用,用于提升重型有效載荷,例如攝像機(jī)。
螺距通常定義為“每轉(zhuǎn)的行程距離”。螺距越大,旋轉(zhuǎn)速度越慢,這會提高飛行速度,但也會消耗更多功率。實(shí)際上,只需更換螺距較小的螺旋槳,即可延長四軸飛行器的飛行時間。螺距較小的螺旋槳可以產(chǎn)生更大的扭矩,從而降低電機(jī)的電流消耗。
螺旋槳的直徑指的是其尺寸。增加直徑可以提高螺旋槳的效率,但也會消耗更多的電機(jī)電流。
電機(jī)與螺旋槳的匹配也是影響穩(wěn)定性的一個因素,尤其是在攜帶相機(jī)時。對于大型四軸飛行器來說,如果要攜帶較大的有效載荷,大螺旋槳和低千伏電機(jī)通常效果最佳。
四、電子速度控制器(ESC)
控制無刷直流電機(jī)的設(shè)備稱為電子調(diào)速器(ESC)。每個電機(jī)都需要一個。
ESC 有三組電線。其中三根粗線連接到無刷電機(jī)的三根電線。另外兩根粗線連接到配電板,為 ESC 和電機(jī)供電。此外,還有三根細(xì)線連接到飛行控制器。
ESC 的額定電流必須能夠承受電機(jī)的最大電流。選擇額定電流高于電機(jī)最大電流的 ESC 始終是明智之舉。
五、飛行控制器

四軸飛行器飛行控制器
飛行控制器是四軸飛行器的大腦。它通過向電調(diào)發(fā)送信號來控制電機(jī)的速度。
高級飛行控制器功能更豐富,并配備陀螺儀、加速度計、聲納、GPS 和磁力計等傳感器。簡易飛行控制器僅包含陀螺儀,對于大多數(shù)初學(xué)者來說已經(jīng)足夠。
飛行控制器將接收來自機(jī)載無線電接收器的信號,以便遠(yuǎn)程控制四軸飛行器。然后,它會發(fā)揮其神奇的功能,向電子調(diào)速器 (ESC) 發(fā)送信號來控制電機(jī)轉(zhuǎn)速。
飛行控制器實(shí)際上是小型計算機(jī),因此可以通過連接到計算機(jī)進(jìn)行編程和更新。盡管飛行控制器很復(fù)雜,但實(shí)際上并不昂貴。
六、無線電發(fā)射器和接收器
四軸飛行器將配備一個機(jī)載無線電接收器,可以使用手持無線電發(fā)射器控制該設(shè)備。接收器和發(fā)射器均由其支持的通道數(shù)量和工作頻率決定。
無線電系統(tǒng)中的每個通道控制四軸飛行器的一個功能或設(shè)備。控制四軸飛行器至少需要通道,但大多數(shù)人至少會從六個通道開始。額外的通道可用于控制照明或控制云臺電機(jī)來定位相機(jī)。
四個基本通道的使用方式如下:一個通道用于油門,一個通道用于左右轉(zhuǎn)彎,一個通道用于前后俯仰,一個通道用于左右滾轉(zhuǎn)。換句話說,油門、偏航、俯仰和滾轉(zhuǎn)。每個通道也可以用來切換不同的飛行模式。
如果你計劃使用多架四軸飛行器,可以購買一個發(fā)射器和幾個兼容的接收器。顯然,這樣每次只能飛行一架飛行器。這是一個不錯的策略,因為它能讓你買得起高質(zhì)量的發(fā)射器,而接收器通常也相當(dāng)便宜。
發(fā)射器-接收器組合以兩種不同的模式工作,這些模式本質(zhì)上決定了發(fā)射器上的控制配置。
模式 1 配置將升降舵控制設(shè)在左搖桿上,將油門控制設(shè)在右搖桿上。模式 2 則將這兩個控制反轉(zhuǎn),這是最常用的配置。如果你是初學(xué)者,通常建議將設(shè)備設(shè)置為模式 2。
七、電池

四軸飛行器電池
沒有電池,四軸飛行器就飛不起來。電池的選擇是在設(shè)計和制造四軸飛行器時最重要的決定之一。
更大的電池容量更大,因此飛行時間也更長。然而,隨著電池容量的增加,其重量也會增加,而增加四軸飛行器的重量會縮短飛行時間,因為需要更大的電機(jī)電流來提升有效載荷。請記住,較重的四軸飛行器靈活性也會降低。
電池的主要規(guī)格是其電流容量,以毫安/小時(mAh)為單位。一塊2200 mAh的電池可以提供2.2安培的電流,持續(xù)1小時。
電池的另一個規(guī)格是電壓。電池由多個電芯組成,普通鋰聚合物電池的每個電芯能夠輸出3.7伏電壓。因此,電池電壓通常指定為3.7伏的倍數(shù)——例如,3.7伏、7.4伏、11.1伏和14.8伏是常見的。如果選擇更高電壓的電池,請確保電調(diào)和電機(jī)都能支持該電壓。
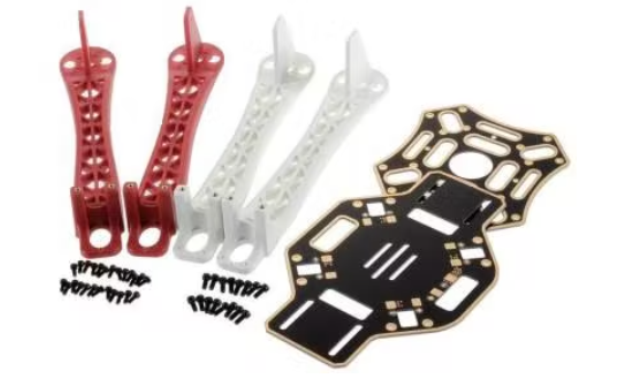
八、框架
最后我們來看看框架,它將四軸飛行器固定在一起。框架可以由多種材料制成,例如木材、塑料或碳纖維。碳纖維的強(qiáng)度與其重量相當(dāng),但也可能很脆,這一點(diǎn)必須考慮,因為毫無疑問,你的四軸飛行器最終可能會墜毀。
四軸飛行器的機(jī)架尺寸以毫米為單位,指的是四軸飛行器上電機(jī)之間的距離。常見的機(jī)架尺寸為 180 毫米、250 毫米和 400 毫米。競速四軸飛行器通常為 250 毫米。
為四軸飛行器選擇框架時,請確保它有足夠的空間和間隙來安裝 ESC 和飛行控制器等物品,以及希望攜帶的任何其他物品(例如相機(jī))。
一些愛好者也會自己制作框架,通常是用木頭。木頭其實(shí)是個不錯的選擇,因為它易于加工,而且價格也相當(dāng)昂貴。它也很容易改裝,以便四軸飛行器安裝配件。然而,木頭容易變形,這會導(dǎo)致四軸飛行器飛行不穩(wěn)定。
甚至可以使用 3D 打印機(jī)制作框架或框架的一部分。
好了,以上就是四軸飛行器的基本組件。把這些組件組裝起來,你就可以設(shè)計一架屬于自己的四軸飛行器了。
翻譯:信盈達(dá)分享匯
原文地址:https://dronebotworkshop.com/how-does-a-quadcopter-work/
-
飛行器
+關(guān)注
關(guān)注
13文章
841瀏覽量
47836 -
無人機(jī)
+關(guān)注
關(guān)注
237文章
11354瀏覽量
196417 -
四軸飛行器
+關(guān)注
關(guān)注
55文章
207瀏覽量
52802
發(fā)布評論請先 登錄
無人機(jī)中的MCU是如何工作的?
基于STM32的四軸無人機(jī)的姿態(tài)解算與控制系統(tǒng)設(shè)計
四軸無人機(jī)設(shè)計
小四軸無人機(jī)設(shè)計四個空心杯電機(jī)
crazepony開源四軸開源無人機(jī)
如何實(shí)現(xiàn)大四軸無人機(jī)的飛控設(shè)計
無人機(jī)MCU驅(qū)動的相關(guān)資料分享
目前速度最快的四軸無人機(jī)亮相




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論