") 飛槳目標(biāo)檢測(cè)端到端開(kāi)發(fā)套件PaddleDetection正式開(kāi)源車(chē)輛分析工具PP-Vehicle
飛槳目標(biāo)檢測(cè)端到端開(kāi)發(fā)套件PaddleDetection正式開(kāi)源車(chē)輛分析工具PP-Vehicle

停車(chē)場(chǎng)閘機(jī)的車(chē)牌識(shí)別、道路兩側(cè)的違停檢測(cè)、繁華路口的車(chē)流統(tǒng)計(jì)、茫茫車(chē)海中的車(chē)輛鎖定…這些場(chǎng)景背后的技術(shù)原理大家是否在心中簡(jiǎn)單構(gòu)思過(guò)?抑或想要抽時(shí)間自己攢一套出來(lái)可卻又不知從何下手?——PP-Vehicle來(lái)告訴你答案。
繼行人分析工具PP-Human之后,飛槳目標(biāo)檢測(cè)端到端開(kāi)發(fā)套件PaddleDetection正式開(kāi)源車(chē)輛分析工具PP-Vehicle!
 PP-Vehicle功能全景圖
PP-Vehicle功能全景圖
PP-Vehicle是一款針對(duì)車(chē)輛分析相關(guān)場(chǎng)景的開(kāi)源工具,產(chǎn)品主要圍繞以下幾個(gè)方面進(jìn)行設(shè)計(jì)開(kāi)發(fā):
-
實(shí)用性:針對(duì)車(chē)輛分析場(chǎng)景共性的底層模型進(jìn)行優(yōu)選迭代;針對(duì)幾個(gè)高頻場(chǎng)景進(jìn)行了詳細(xì)的后處理策略設(shè)計(jì),可以滿(mǎn)足業(yè)務(wù)的快速上線(xiàn)需求。同時(shí)提供豐富的二次開(kāi)發(fā)教程,方便用戶(hù)根據(jù)自己的業(yè)務(wù)場(chǎng)景進(jìn)行私有化開(kāi)發(fā)。
-
泛化性:在公開(kāi)數(shù)據(jù)集以及自采數(shù)據(jù)集上進(jìn)行充分訓(xùn)練,并且提供預(yù)訓(xùn)練模型,覆蓋車(chē)輛分析中監(jiān)控視角、駕駛員視角、俯拍視角等常見(jiàn)相機(jī)視角。
-
低代碼:實(shí)現(xiàn)1行代碼快速部署,支持圖片、視頻、單路/多路rtsp視頻流輸入,修改配置文件即可快速實(shí)現(xiàn)策略修改以及pipeline的組合。
接下來(lái)讓我們具體看一下PP-Vehicle的工作。
搭配源碼食用更佳!
https://github.com/PaddlePaddle/PaddleDetection
記得Star收藏,
防止走丟又實(shí)時(shí)關(guān)注更新!

整體方案
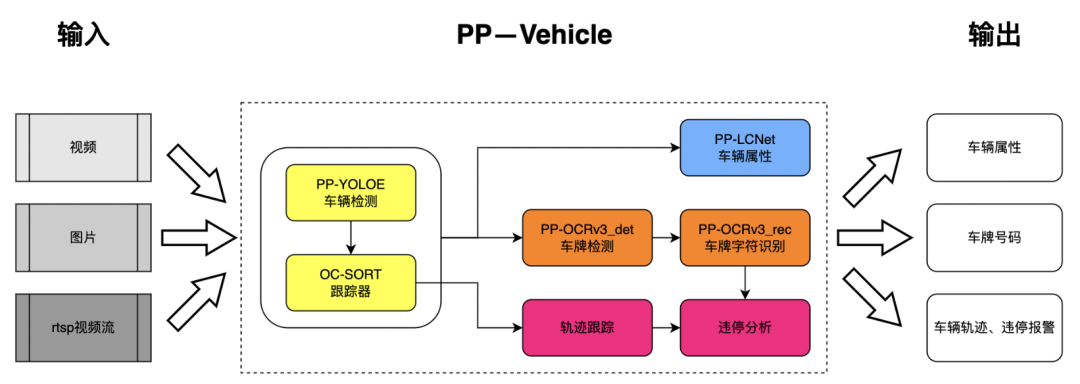
PP-Vehicle技術(shù)架構(gòu)
PP-Vehicle整體分為輸入、核心算法、輸出三部分:
-
輸入:支持離線(xiàn)圖片、視頻以及rtsp視頻流等形式,可根據(jù)輸入類(lèi)型快速配置,如下圖所示,為輸入配置為rtsp拉流的示例。

PP-Vehiclertsp拉流預(yù)測(cè)示例
-
核心算法:主要由預(yù)訓(xùn)練模型以及邏輯策略組成。預(yù)訓(xùn)練模型主要有4個(gè):車(chē)輛檢測(cè)模型、車(chē)輛跟蹤模型、車(chē)牌識(shí)別模型、車(chē)輛屬性分析模型。各個(gè)模型性能見(jiàn)下表:
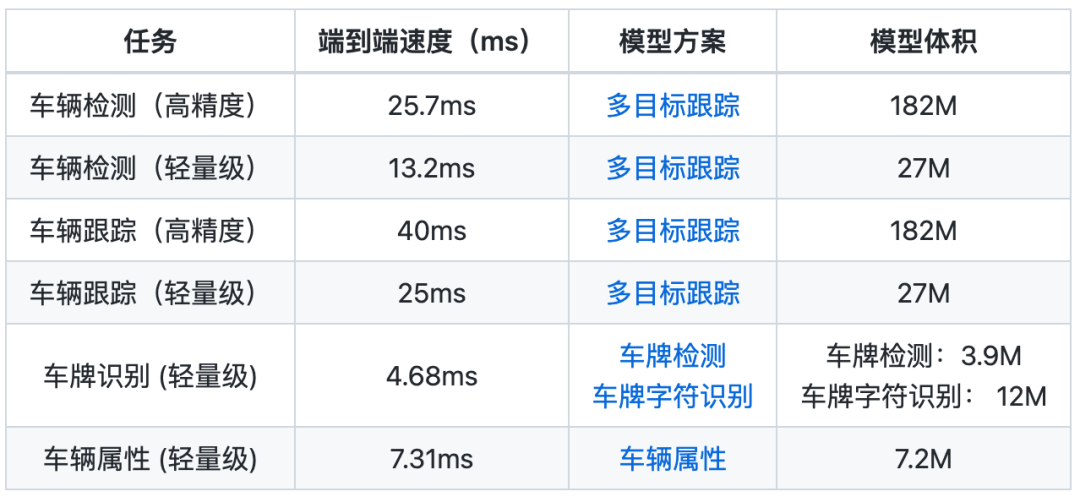
預(yù)訓(xùn)練模型
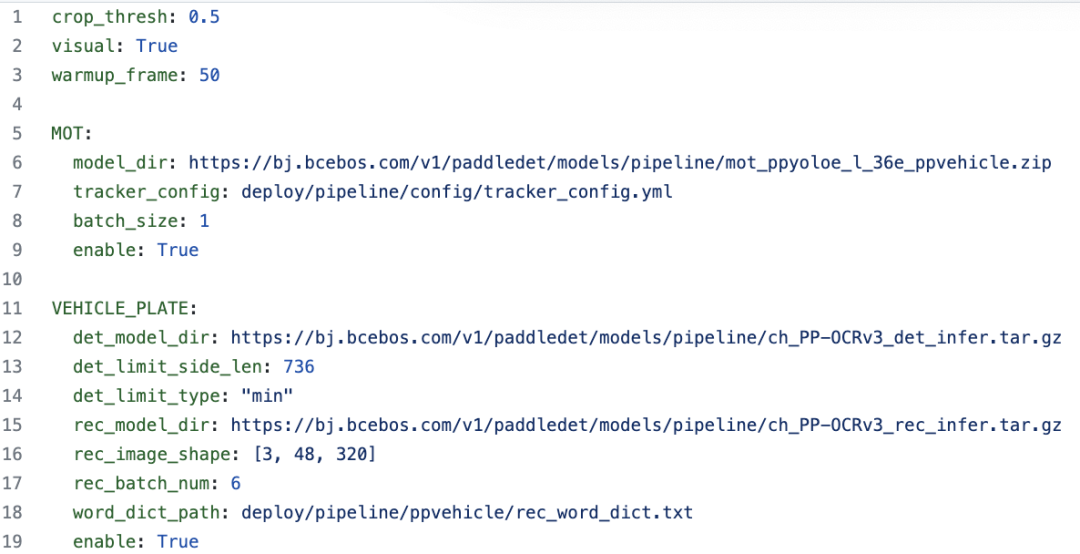
違停pipeline配置文件示例
-
輸出:包括車(chē)牌信息、車(chē)輛軌跡、車(chē)輛屬性、違停信息等;同時(shí)支持這些信息的可視化渲染輸出,如下圖為直接配置可視化信息rtsp推流顯示。

rtsp推流展示示例

詳見(jiàn):
https://github.com/PaddlePaddle/PaddleDetection/blob/release/2.5/deploy/pipeline/docs/tutorials/PPVehicle_QUICK_STARTED.md
方案簡(jiǎn)析
PP-Vehicle針對(duì)一些高頻車(chē)輛分析場(chǎng)景提供了詳細(xì)的解決方案,在這里就主要思路進(jìn)行簡(jiǎn)析,詳細(xì)的解析大家可以關(guān)注課后的海報(bào),聽(tīng)一聽(tīng)開(kāi)發(fā)同學(xué)的詳解。
車(chē)牌識(shí)別方案:
-
通過(guò)目標(biāo)檢測(cè)來(lái)獲取圖片中的車(chē)輛檢測(cè)框,模型方案為PP-YOLOE-l。當(dāng)輸入為視頻時(shí),會(huì)基于車(chē)輛檢測(cè)框,使用OC-SORT跟蹤模型來(lái)完成車(chē)輛的多目標(biāo)跟蹤;
-
通過(guò)車(chē)輛檢測(cè)框的坐標(biāo)截取對(duì)應(yīng)位置圖像;
-
使用車(chē)牌檢測(cè)模型在每張車(chē)輛截圖中識(shí)別車(chē)牌所在位置,同理截取車(chē)牌區(qū)域,模型方案為PP-OCRv3車(chē)牌檢測(cè)模型;
-
使用字符識(shí)別模型識(shí)別車(chē)牌中的字符,模型方案為PP-OCRv3車(chē)牌識(shí)別模型;
-
此外還使用了一些優(yōu)化策略提升速度以及準(zhǔn)確率。
-
使用跳幀策略,每10幀做一次車(chē)牌檢測(cè),避免每幀做車(chē)牌檢測(cè)的算力消耗;
-
車(chē)牌結(jié)果穩(wěn)定策略,避免單幀結(jié)果的波動(dòng),利用同一個(gè)id的歷史所有車(chē)牌識(shí)別結(jié)果進(jìn)行投票,得到該id最大可能的正確結(jié)果;
-
車(chē)輛檢測(cè)模型聯(lián)合BDD-100k和UA-DETRAC數(shù)據(jù)集訓(xùn)練, 車(chē)牌檢測(cè)方案采用CCPD數(shù)據(jù)集在車(chē)牌場(chǎng)景finetune提升檢測(cè)精度。
詳見(jiàn):
https://github.com/PaddlePaddle/PaddleDetection/blob/release/2.5/deploy/pipeline/docs/tutorials/ppvehicle_plate.md
車(chē)輛屬性識(shí)別方案:
-
車(chē)輛屬性識(shí)別模型使用了PaddleClas的超輕量圖像分類(lèi)方案(PULC,Practical Ultra Lightweight image Classification)。
-
并在該模型的基礎(chǔ)上,進(jìn)一步使用了以下優(yōu)化方案:
-
使用SSLD預(yù)訓(xùn)練模型,在不改變推理速度的前提下,精度提升約0.5個(gè)百分點(diǎn);
-
融合EDA數(shù)據(jù)增強(qiáng)策略,精度提升0.52個(gè)百分點(diǎn);
-
使用SKL-UGI知識(shí)蒸餾, 精度提升0.23個(gè)百分點(diǎn)。
詳見(jiàn):
https://github.com/PaddlePaddle/PaddleDetection/blob/release/2.5/deploy/pipeline/docs/tutorials/ppvehicle_attribute.md
違停檢測(cè)方案:
-
通過(guò)目標(biāo)檢測(cè)來(lái)獲取車(chē)輛檢測(cè)框,模型方案為PP-YOLOE;
-
基于跟蹤算法獲取每輛車(chē)的軌跡,模型方案為OC-SORT。如果車(chē)輛中心在違停區(qū)域內(nèi)且在指定時(shí)間內(nèi)未發(fā)生移動(dòng),則視為違章停車(chē);
-
使用車(chē)牌識(shí)別模型得到違章停車(chē)車(chē)牌并可視化。
詳見(jiàn):
https://github.com/PaddlePaddle/PaddleDetection/blob/release/2.5/deploy/pipeline/docs/tutorials/ppvehicle_illegal_parking.md
二次開(kāi)發(fā)
此外,PP-Vehicle支持二次開(kāi)發(fā),大家可以在自己的數(shù)據(jù)集上進(jìn)行模型訓(xùn)練、策略改寫(xiě)等,定制化自己的專(zhuān)屬PP-Vehicle。如下圖為車(chē)牌識(shí)別任務(wù)二次開(kāi)發(fā)示例:

二次開(kāi)發(fā)示例
詳見(jiàn):
https://github.com/PaddlePaddle/PaddleDetection/blob/release/2.5/docs/advanced_tutorials/customization/ppvehicle_plate.md
部署優(yōu)化
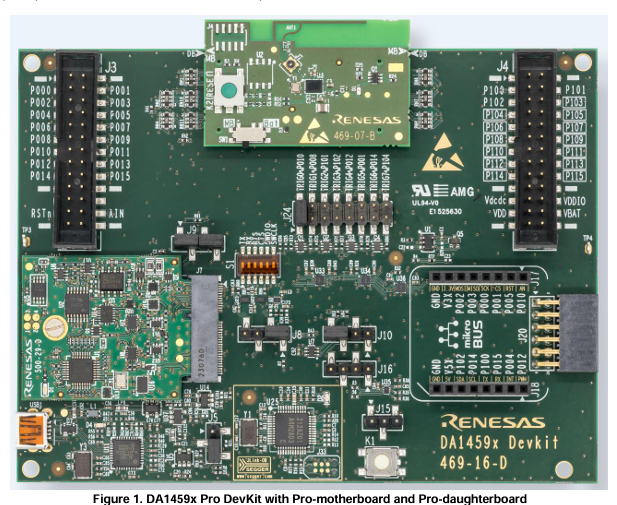
特別的,PP-Vehicle針對(duì)邊緣端部署場(chǎng)景進(jìn)行了優(yōu)化,如針對(duì)Jetson系列模型選擇輕量級(jí)版本,同時(shí)開(kāi)啟跟蹤跳幀功能進(jìn)行優(yōu)化,同時(shí)提供了豐富的部署選項(xiàng)以達(dá)到性能-速度的平衡。

Jetson配置參數(shù)
詳見(jiàn):
https://github.com/PaddlePaddle/PaddleDetection/blob/release/2.5/deploy/pipeline/docs/tutorials/PPVehicle_QUICK_STARTED_en.md#Inference-Deployment
審核編輯 :李倩
-
代碼
+關(guān)注
關(guān)注
30文章
4967瀏覽量
73954 -
車(chē)牌識(shí)別
+關(guān)注
關(guān)注
5文章
84瀏覽量
16639 -
車(chē)輛檢測(cè)
+關(guān)注
關(guān)注
0文章
33瀏覽量
11054
原文標(biāo)題:最新優(yōu)秀開(kāi)源!車(chē)牌識(shí)別、車(chē)輛檢測(cè)、車(chē)輛跟蹤、違停檢測(cè)一網(wǎng)打盡!
文章出處:【微信號(hào):CVer,微信公眾號(hào):CVer】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
AI端側(cè)部署案例(SC171開(kāi)發(fā)套件V2-FAS)
AI端側(cè)部署開(kāi)發(fā)(SC171開(kāi)發(fā)套件V2-FAS)
SC171開(kāi)發(fā)套件V3 技術(shù)資料 2026版
AI功能(SC171開(kāi)發(fā)套件V3)2026版
AI端側(cè)部署案例(SC171開(kāi)發(fā)套件V3)2026版
AI端側(cè)部署開(kāi)發(fā)(SC171開(kāi)發(fā)套件V3)2026版
SC171開(kāi)發(fā)套件V3 技術(shù)資料 2026版
廣和通發(fā)布端側(cè)目標(biāo)檢測(cè)模型FiboDet
基于LockAI視覺(jué)識(shí)別模塊:C++目標(biāo)檢測(cè)
DA14594 BLE Pro開(kāi)發(fā)套件 開(kāi)源 (原理圖+BOM+PCB)



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論