 一個典型的SLAM框架
一個典型的SLAM框架

標定就是找到雷達到相機的空間轉換關系,在不同的坐標系之間轉換需要旋轉矩陣 R 和平移矩陣 T,為后續的雷達和相機數據融合做準備:
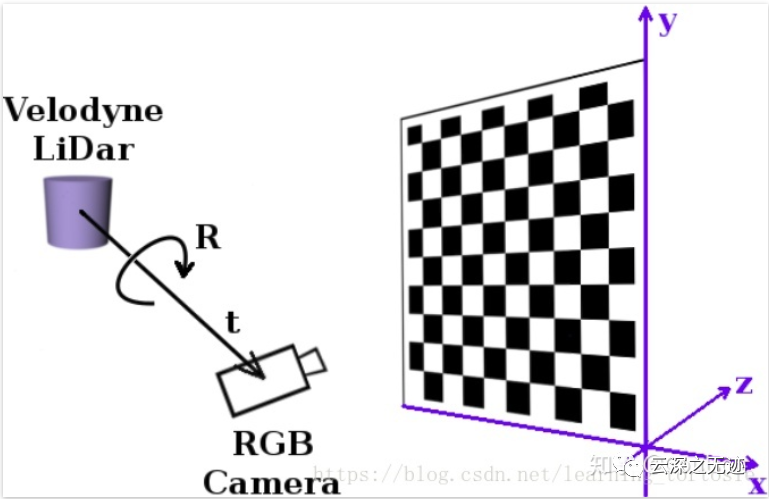
一個標定圖
校準單目的相機
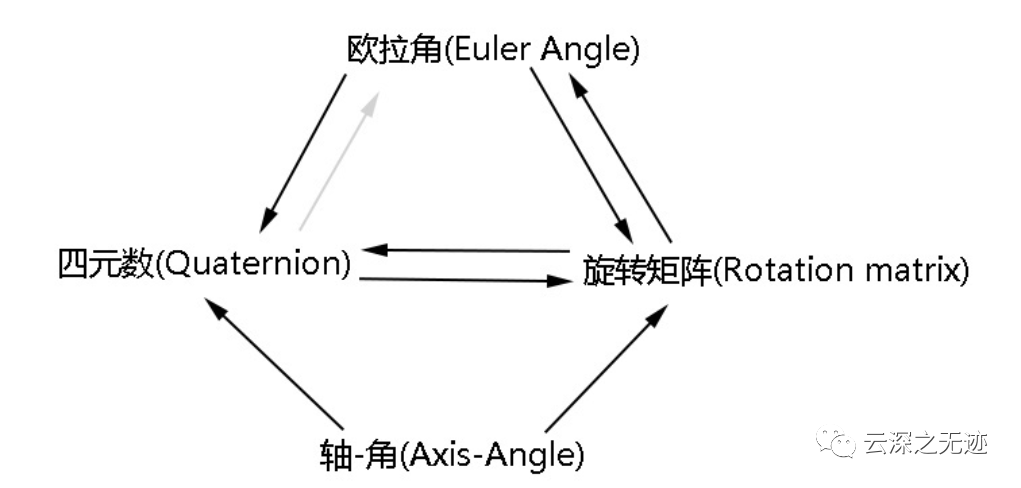
幾種旋轉控制的數學轉換
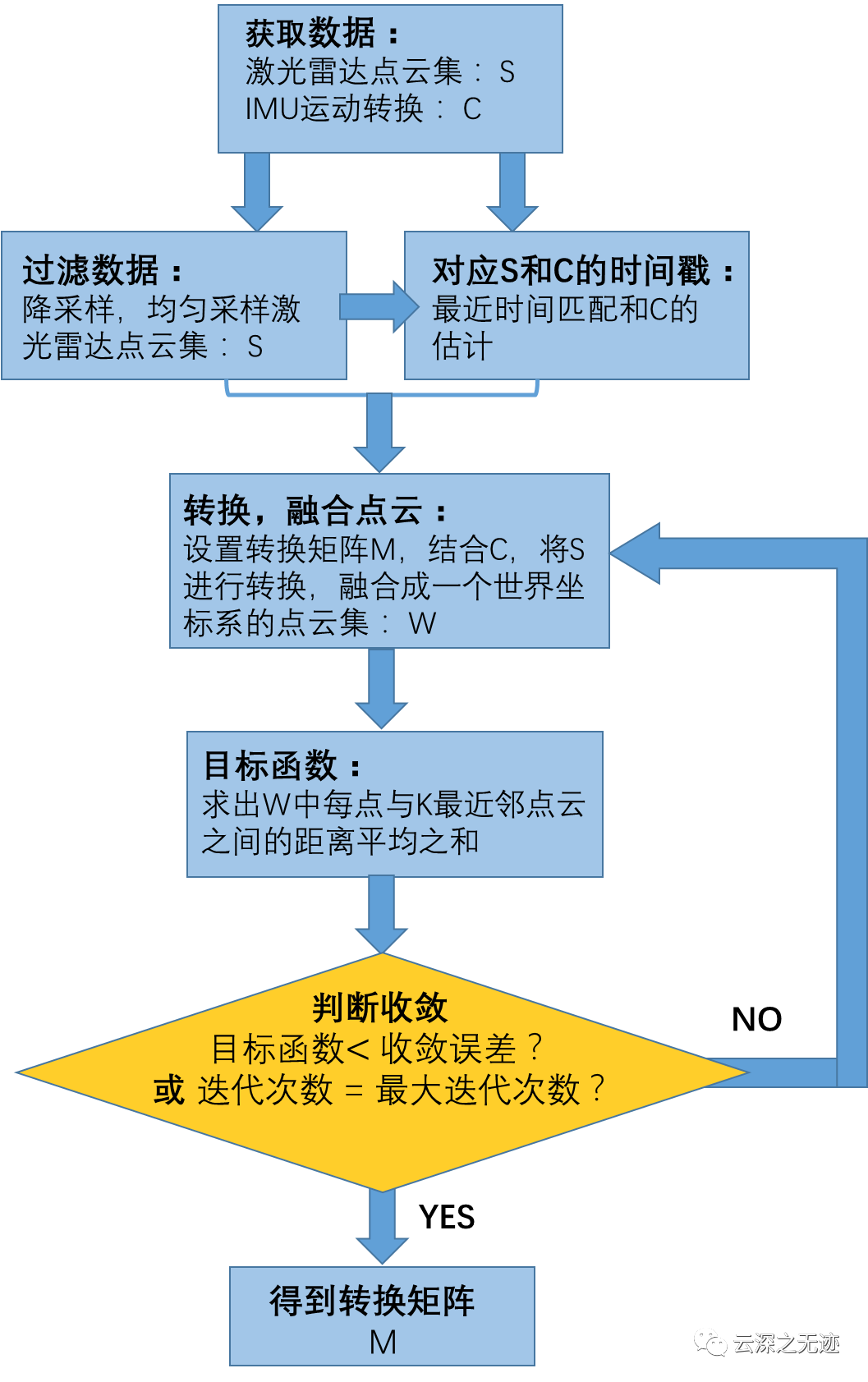
匹配的算法流程
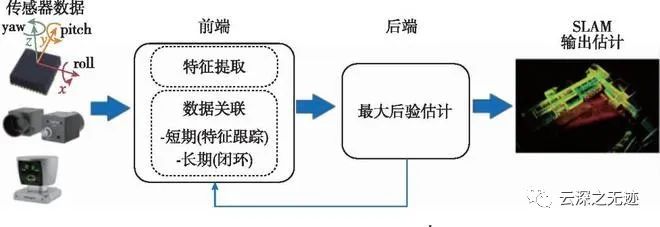
一個典型的SLAM框架
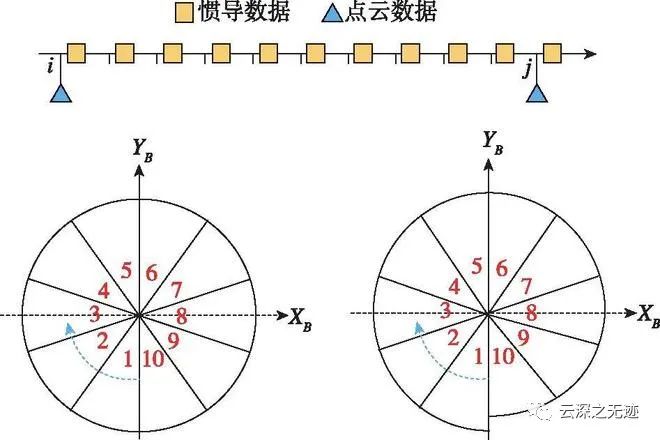
速度不太的傳感器之間的信息使用
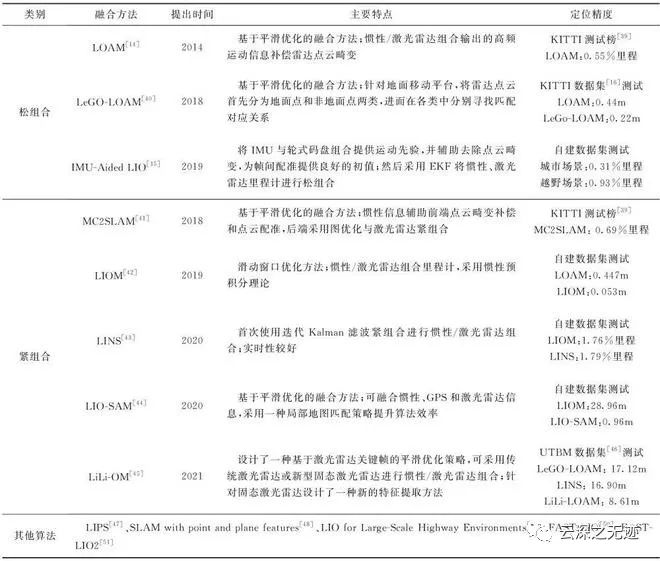
慣性/激光雷達組合SLAM
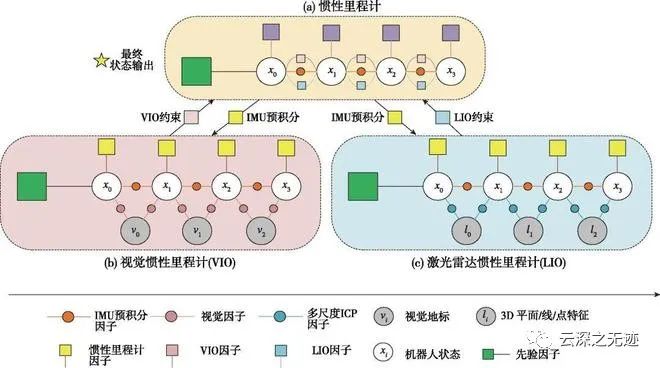
將慣性/視覺與慣性/激光雷達兩種里程計進行融合示意圖
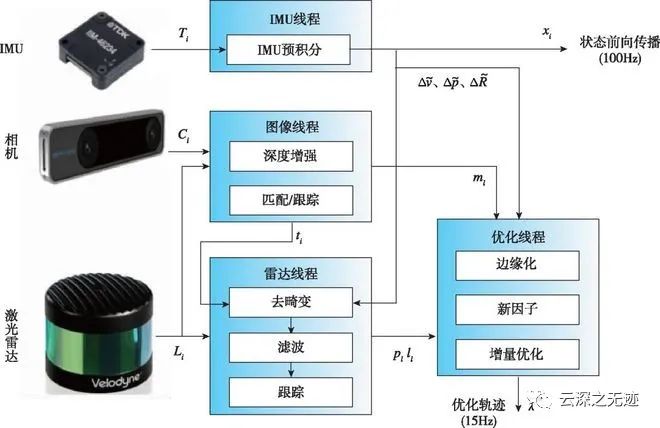
慣性/視覺/激光雷達緊組合示意圖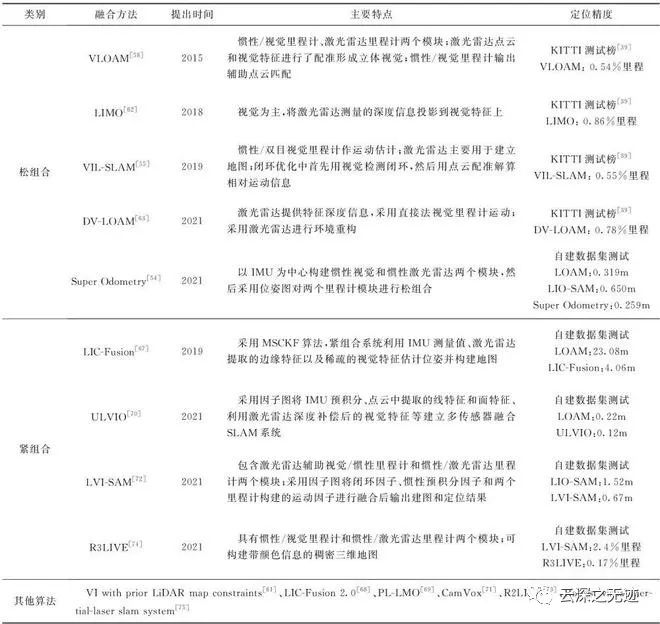
慣性/視覺/激光雷達組合SLAM
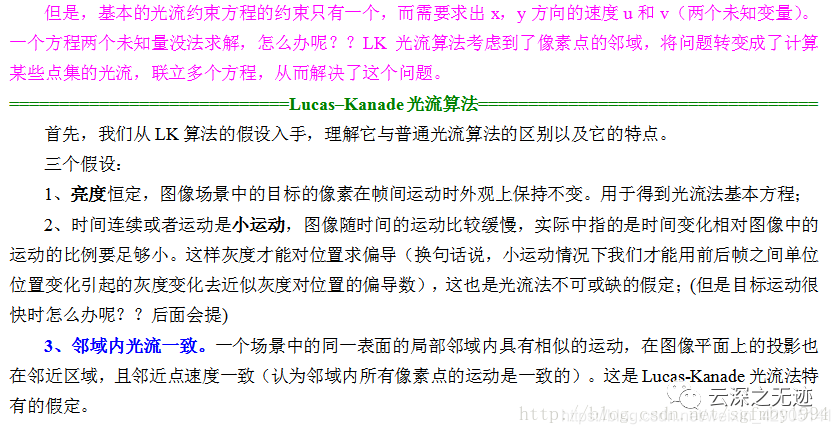
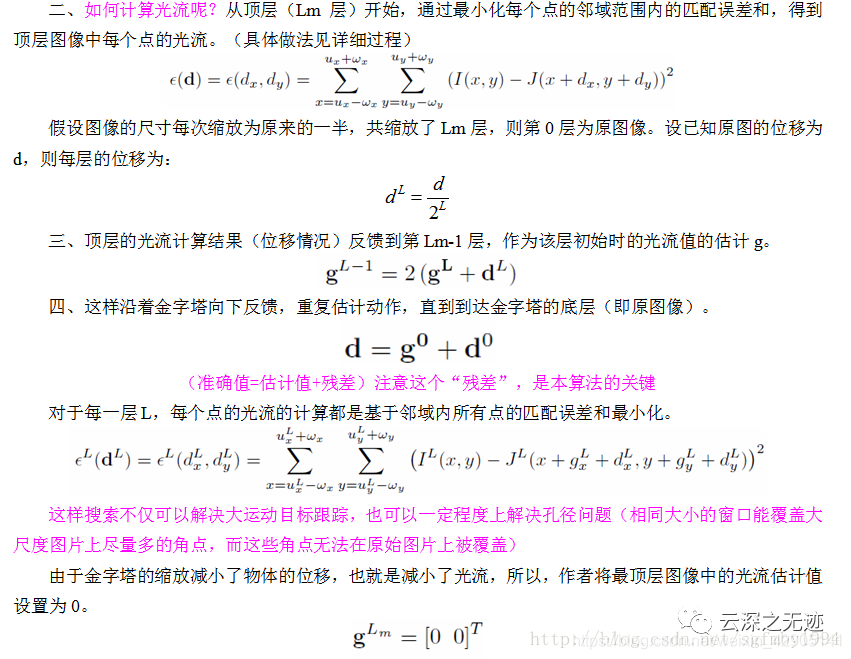
KLT 算法本質上也基于光流的三個假設,不同于前述直接比較像素點灰度值的作法,KLT 比較像素點周圍的窗口像素,來尋找最相似的像素點。
這個SLAM確實是又多又難,自學有點費勁,還是應該找個課上一手,雖然我上課就犯困,但是這個事情上面是有必要的。
審核編輯:劉清
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
傳感器
+關注
關注
2576文章
55053瀏覽量
791461 -
SLAM
+關注
關注
24文章
457瀏覽量
33336 -
KLT
+關注
關注
0文章
5瀏覽量
7595
原文標題:過于SLAM的一篇雜記(末尾求拼單)
文章出處:【微信號:TT1827652464,微信公眾號:云深之無跡】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
熱點推薦
GSLAM:一套通用的SLAM框架與基準
其中,SLAM算法插件提供了SLAM領域流行的優秀算法,包括DSO,ORBSLAM,SVO和TheiaSFM等,這些插件可以直接集成到自己的代碼中,研究人員也可以基于這些插件進行進一步研究或者貢獻自己的插件。此外Rviz也被集成

基于多模態語義SLAM框架
本文提出了一個魯棒且快速的多模態語義 SLAM 框架,旨在解決復雜和動態環境中的 SLAM 問題。具體來說,將僅幾何聚類和視覺語義信息相結合
SLAM技術的應用及發展現狀
近年來,由于掃地機的出現使得SLAM技術名聲大噪,如今,已在機器人、無人機、AVG等領域相繼出現它的身影,今天就來跟大家聊一聊國內SLAM的發展現狀。 SLAM的多領域應用
發表于 12-06 10:25
激光SLAM與視覺SLAM有什么區別?
機器人定位導航中,目前主要涉及到激光SLAM與視覺SLAM,激光SLAM在理論、技術和產品落地上都較為成熟,因而成為現下最為主流的定位導航方式,在家用掃地機器人及商用送餐機器人等服務機器人中普遍采用了...
發表于 07-05 06:41
SLAM的相關知識點分享
研究生期間進行了基于2D激光雷達的SLAM的研究,當時主要做了二維激光雷達的數據處理。小弟不才,沒有入得了SLAM的坑,卻一直謎之向往,如今得以機會,決定正式邁出第一步,徹底進入
發表于 08-30 06:13
HOOFR-SLAM的系統框架及其特征提取
Intelligent Vehicles Applications1. 介紹2. HOOFR-SLAM2.1 系統框架2.2 HOOFR特征提取2.3 映射線程2.3.1 特征匹配1. 介紹提出一種HOOFR-...
發表于 12-21 06:35
幾種典型的SLAM應用場景和它的解決方案
隨著AR/VR行業的興起,以及智能移動機器人、無人駕駛的發展,行業對SLAM技術的需求出現了井噴。 另一方面,隨著傳感器技術的發展,計算資源的豐富以及算法的進步,SLAM技術本身也進入了一
發表于 09-22 16:11
?2次下載
SLAM導航技術的分類、典型應用及國內發展現狀
SLAM是Simultaneous localization and mapping縮寫,意為“同步定位與建圖”,主要用于解決機器人在未知環境運動時的定位與地圖構建問題。 SLAM的典型應用領域
經典視覺SLAM框架開源方案
SLAM 是 Simultaneous Localization and Mapping 的縮寫,中文譯作“同時定位與地圖構建”。它是指搭載特定傳感器的主體,在沒有環境先驗信息的情況下,于運動過程中建立環境的模型,同時估計自己的運動。如果這里的傳感器主要為相機,那就稱為“視覺 S
發表于 12-05 10:16
?2095次閱讀
基于LeGo-LOAM框架的3D激光SLAM技術
能力也過硬,一般企業年薪至少30W起步了。 學習SLAM主要需要攻克三大難關: 扎實的數學基礎 對整個SLAM大框架及細節部分理解到一定深度
視覺SLAM開源方案匯總 視覺SLAM設備選型
SLAM至今已歷經三十多年的研究,這里給出經典視覺SLAM框架,這個框架本身及其包含的算法已經基本定型,并且已經在許多視覺程序庫和機器人程序庫中提供。
發表于 08-10 14:15
?1856次閱讀

視覺SLAM是什么?視覺SLAM的工作原理 視覺SLAM框架解讀
近年來,SLAM技術取得了驚人的發展,領先一步的激光SLAM已成熟的應用于各大場景中,視覺SLAM雖在落地應用上不及激光SLAM,但也是目前

用于SLAM中點云地圖綜合評估的開源框架
在SLAM中評估大規模的點云地圖仍頗具挑戰,主要原因在于缺乏統一、穩健且高效的評估框架。本文提出了MapEval,這是一個用于點云地圖綜合評
一種適用于動態環境的自適應先驗場景-對象SLAM框架
由于傳統視覺SLAM在動態場景中容易會出現嚴重的定位漂移,本文提出了一種新穎的基于場景-對象的可靠性評估框架,該框架通過當前幀質量指標以及相對于可靠參考幀的場景變化,全面評估




 工商網監
工商網監
評論