") 虛擬數(shù)字機器人仿真測試驗證平臺(C6657+FPGA架構(gòu))
虛擬數(shù)字機器人仿真測試驗證平臺(C6657+FPGA架構(gòu))

一、平臺特點
真正提供機器人控制器檢測、驗證平臺,可檢測各類工業(yè)機器人控制器的功能、性能指標(biāo);
全國產(chǎn)化,具備從虛擬機器人軟件框架到硬件采集電路全方位自主開發(fā);
提供基于EtherCAT協(xié)議的檢測、驗證接口,提供“實物機器人+半物理平臺+虛擬機器人”的運動及動力學(xué)系統(tǒng)辨識場景。
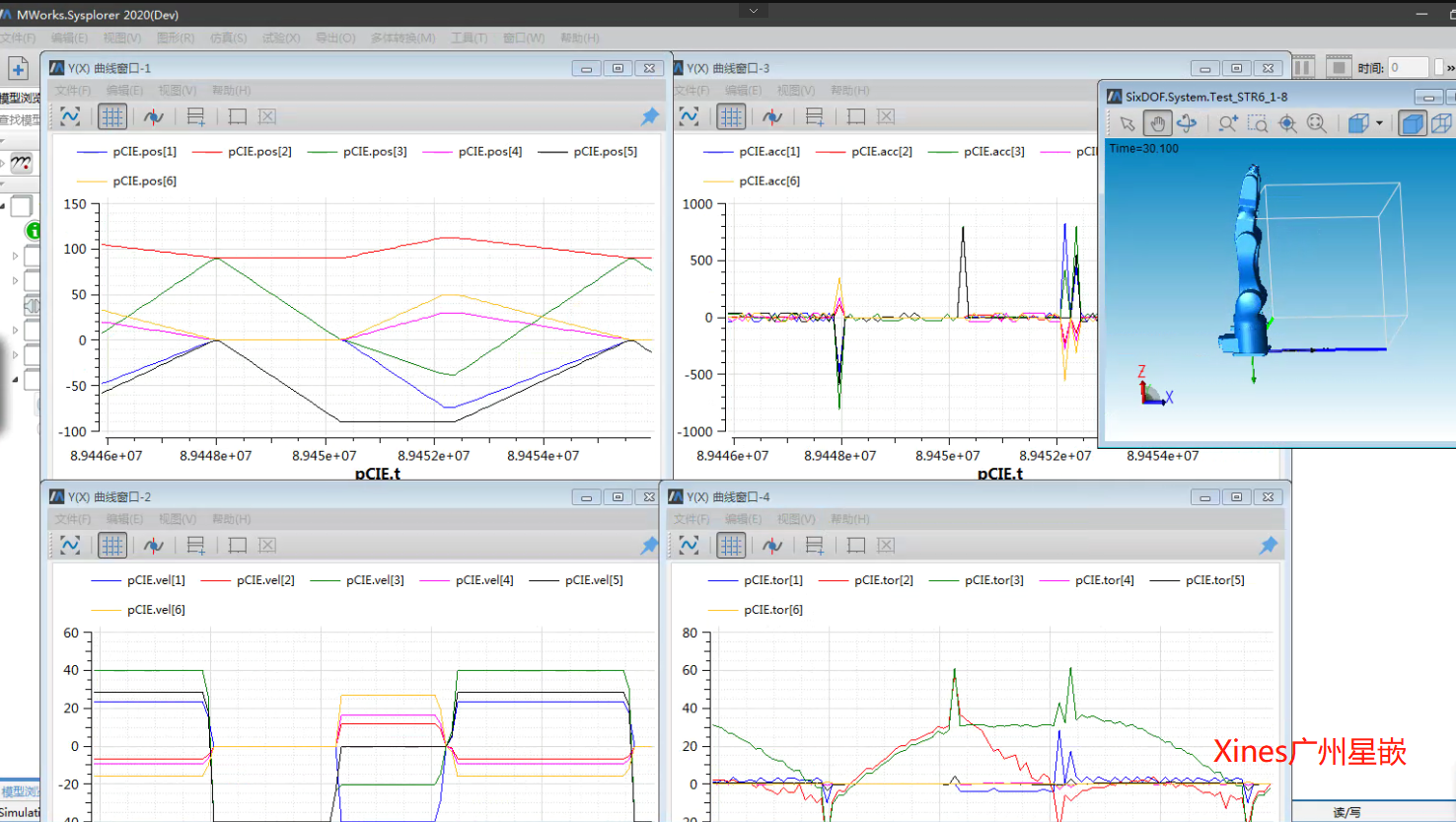
允許基于EtherCAT總線的機器人控制器連接,仿真硬件可實時吞吐仿真數(shù)據(jù),實現(xiàn)ms級的檢測、驗證。


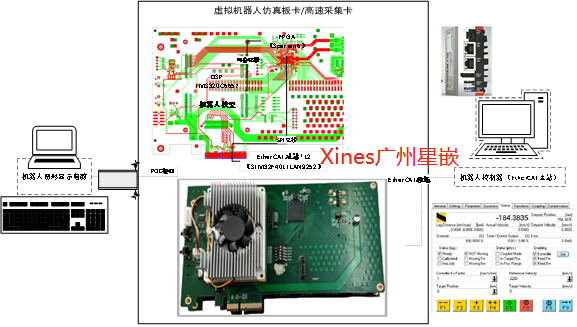
系統(tǒng)構(gòu)成:
硬件包括DSP高速采集板+12個EtherCAT從站板,通過PCIe總線擴展;
軟件架構(gòu):
支持Qt的可擴展檢測界面,驗證案例庫,可導(dǎo)入機器人實體3D模型庫,EtherCAT 組件庫,數(shù)據(jù)分析和演示庫,輸出檢測、驗證表單等功能模塊;
產(chǎn)品特色:
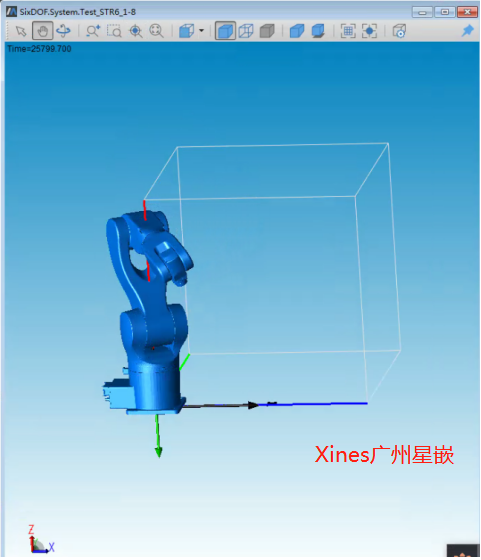
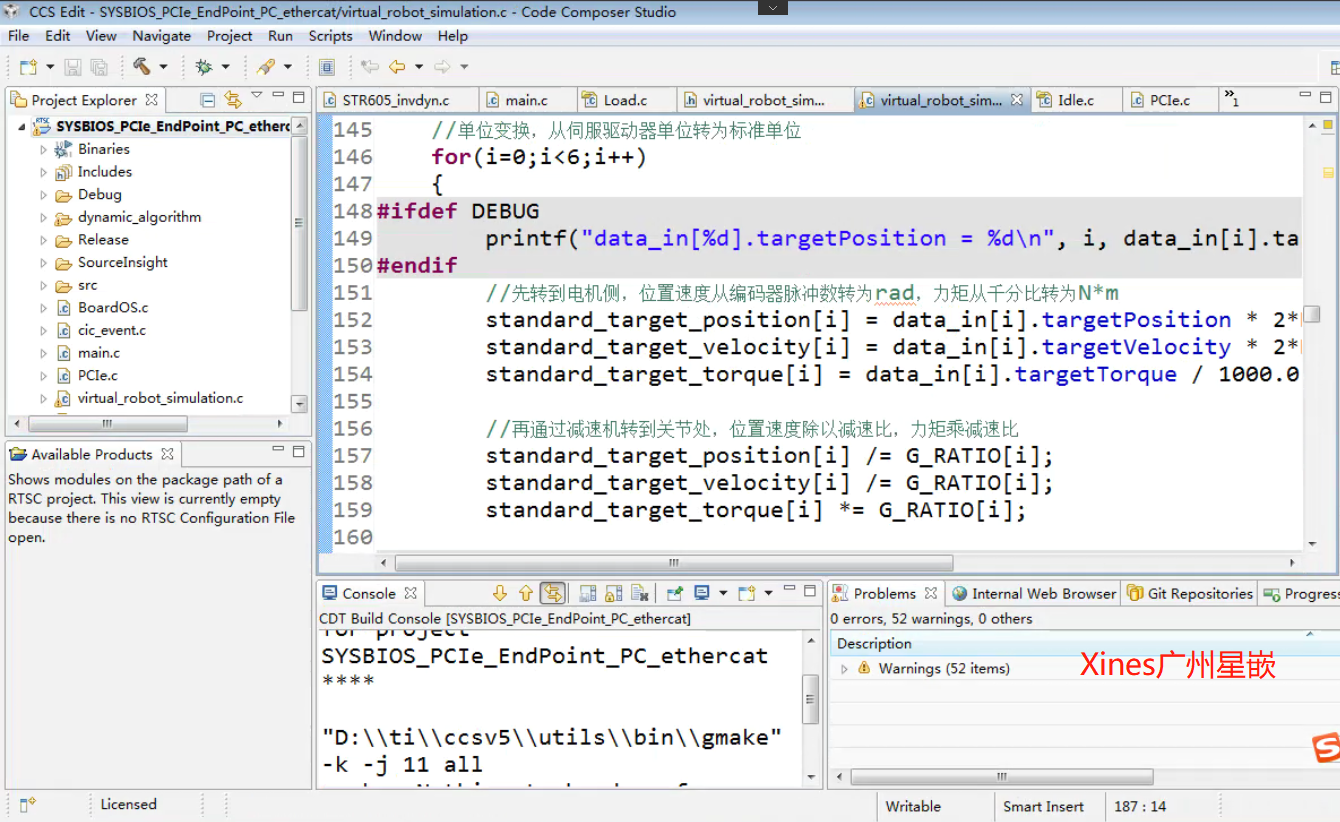
帶重力場/摩擦力模型的矢量環(huán)境,可導(dǎo)入標(biāo)準(zhǔn)CAD模型,并提供數(shù)字電機、數(shù)字編碼器、數(shù)字減速機建模,重構(gòu)虛擬機器人物理元素,最大支持12個機器人關(guān)節(jié)及外軸模型;
二、系統(tǒng)優(yōu)勢
快速導(dǎo)入機器人3D模型,僅需一塊PCIe卡連接一條網(wǎng)線,即可實現(xiàn)面向機器人控制器的功能與性能實驗、測試、驗證工作,國內(nèi)首創(chuàng);
基于EtherCAT協(xié)議,集成多種開發(fā)包,既可支持研究、開發(fā)方案驗證,又可作為標(biāo)準(zhǔn)檢測工具,可安全檢測滿負(fù)荷、超負(fù)荷運動及動力學(xué)功能;
實時接入EtherCAT從站,配置ESI文件為標(biāo)準(zhǔn)ECAT從站;兼容倍福、卡諾普、KEBA、固高、埃斯頓等工業(yè)機器人主站;支持采用KPA、acontis、codesys、 igh、 soem等被檢主站控制器;
不僅僅是動畫,是帶采集硬件的科研平臺!!!
實物展示
致力于DSP、ARM、FPGA、SoC等多核異構(gòu)技術(shù)服務(wù)。
軟硬件和算法團(tuán)隊,聚焦嵌入式行業(yè), 提供全棧式解決方案。
咨詢未必選擇,只是多一個參考,歡迎交流與合作。
審核編輯 黃昊宇
-
機器人
+關(guān)注
關(guān)注
213文章
31073瀏覽量
222168 -
仿真測試
+關(guān)注
關(guān)注
0文章
115瀏覽量
11792
發(fā)布評論請先 登錄
機器人環(huán)境適應(yīng)性試驗怎么做?需要用到哪些設(shè)備和標(biāo)準(zhǔn)?

北京人形機器人創(chuàng)新中心中試驗證平臺正式啟動
探索RISC-V在機器人領(lǐng)域的潛力
攻堅農(nóng)業(yè)仿真挑戰(zhàn):Robotec農(nóng)業(yè)機器人仿真平臺

高精度機器人控制的核心——基于 MYD-LT536 開發(fā)板的精密運動控制方案
RK3576機器人核心:三屏異顯+八路攝像頭,重塑機器人交互與感知
如何在NVIDIA Isaac Lab中使用Newton訓(xùn)練四足機器人

NVIDIA助力構(gòu)建人形機器人全身遙操作仿真平臺
工業(yè)機器人的特點
機器人測試:從虛擬到現(xiàn)實,機器人如何才能變成真正的打工牛馬?




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論