") ECU從休眠到網(wǎng)絡(luò)喚醒時間怎么測?
ECU從休眠到網(wǎng)絡(luò)喚醒時間怎么測?

Q1:ECU從休眠到網(wǎng)絡(luò)喚醒時間怎么測?
答:對于CAN網(wǎng)絡(luò),ECU從休眠到網(wǎng)絡(luò)喚醒時間的測試方法如下:
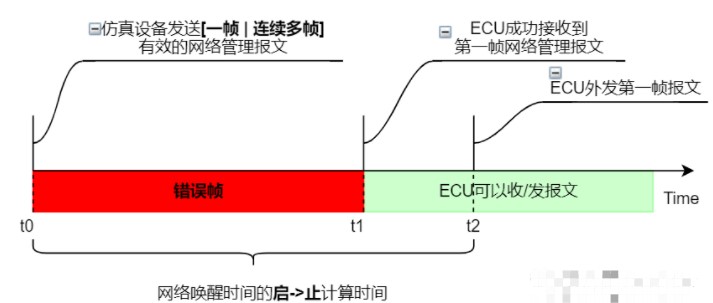
t0時刻,使用仿真設(shè)備(CANoe/PCan/ZLG等)發(fā)送一幀或者連續(xù)多幀有效的網(wǎng)絡(luò)管理報文;
t0~t1期間,由于ECU休眠(主芯片斷電,不考慮低功耗情況),Controller關(guān)閉,ECU不能接收仿真設(shè)備發(fā)送的報文,所以,此期間仿真設(shè)備發(fā)送的報文,ECU無法應(yīng)答而出現(xiàn)錯誤幀(No Ack);
t1時刻,ECU主芯片供電,程序運行,Controller恢復(fù)正常工作模式(Transceiver也處于正常工作模式),可以接收報文;
t2時刻,識別到有效喚醒源(有效網(wǎng)絡(luò)管理報文),通信打開,ECU外發(fā)第一幀報文。如果節(jié)點的網(wǎng)絡(luò)類型是Passive Mode,第一幀外發(fā)報文是應(yīng)用報文;如果節(jié)點的網(wǎng)絡(luò)類型非Passive Mode,第一幀外發(fā)報文是網(wǎng)絡(luò)管理報文。
所以,ECU從休眠到喚醒的啟->止時間 =t0 ->t2,測試時計算此時間差值(t2-t0)是否滿足需求。注意,t0時刻是指第一幀錯誤幀時刻。
上述時序如下所示:
提示:仿真設(shè)備為什么發(fā)送多幀網(wǎng)絡(luò)管理報文?如果Transceiver沒有PN(Partial Network)功能,不能識別網(wǎng)絡(luò)管理報文,第一幀網(wǎng)絡(luò)管理報文只是激活SBC,完成主芯片的供電任務(wù),而沒有被ECU有效接收,則需要第二幀網(wǎng)絡(luò)管理報文喚醒節(jié)點網(wǎng)絡(luò)。
Q2:節(jié)點被動喚醒進(jìn)入RMS狀態(tài),RMB需要置位嗎?
答:不需要。節(jié)點被動喚醒(收到其他節(jié)點的網(wǎng)絡(luò)管理報文),由BSM(Bus Sleep Mode)進(jìn)入RMS(Repeat Message State),此時CBV(Control Bit Vector)值 =初始值,而CBV的初始值為0x00,如下所示:

如果在NOS(Normal Operation State)/RSS(Ready Sleep State )主動請求進(jìn)入RMS,即:主動調(diào)用CanNm_RepeatMessageRequest()接口,RMB(Repeat Message Bit)置位,即:RMB = 1。
CanNm_RepeatMessageRequest()接口不能在RMS、PBM、BSM狀態(tài)下主動調(diào)用,如下所示:

這意味著,節(jié)點被動喚醒的時候,網(wǎng)絡(luò)狀態(tài)由BSM進(jìn)入RMS,所以RMB = 0。
審核編輯:劉清
-
CAN總線
+關(guān)注
關(guān)注
145文章
2043瀏覽量
135212 -
ecu
+關(guān)注
關(guān)注
14文章
982瀏覽量
57266 -
RMS
+關(guān)注
關(guān)注
2文章
158瀏覽量
37714 -
芯片供電
+關(guān)注
關(guān)注
1文章
3瀏覽量
1765
發(fā)布評論請先 登錄
北斗網(wǎng)絡(luò)時間服務(wù)器:從“精準(zhǔn)心跳”到自主可控的技術(shù)實踐
北斗時間服務(wù)器:從“單點對時”到“網(wǎng)絡(luò)協(xié)同”的跨越

解決RK806+RK3588休眠異常!從硬件特性到軟件優(yōu)化的完整方案
揭秘TEE深度休眠喚醒“低概率報錯”:從概念到解決方案的全解析

RK平臺休眠喚醒與低功耗調(diào)試全攻略:從原理到WiFi功耗問題實戰(zhàn)
MCU典型的睡眠喚醒時間delay的概念
CW32L010進(jìn)入休眠模式后,外部中斷無法喚醒MCU,為什么?
TC10管理:虹科10BASE-T1S方案高效管控ECU休眠/喚醒
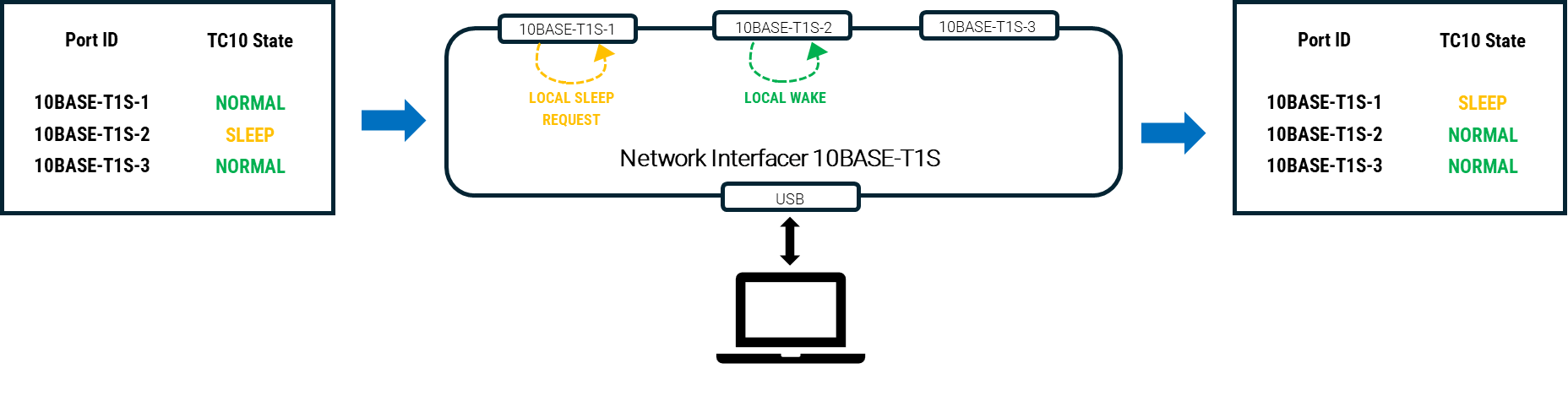
虹科分享 | TC10管理:虹科10BASE-T1S方案高效管控ECU休眠/喚醒




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論