 目標檢測和模型介紹
目標檢測和模型介紹

目標檢測介紹
目標檢測是計算機視覺領域中最基礎且最具挑戰性的任務之一,其包含物體分類和定位。它為實例分割、圖像捕獲、視頻跟蹤等任務提供了強有力的特 征分類基礎。
傳統的目標檢測方法包括預處理、區域提案、特征提取、特征選擇、特征分類和后處理六個階段,大多數檢測模型關注于物體特征的提取和區域分類算法的選擇。
Deformable Part?based Model(DPM)算法三次在PASCAL VOC目標檢測競賽上獲得冠軍,是傳統目標檢測方法的巔峰之作. 然而在2008年至2012年期間,目標檢測模型在PASCAL VOC數據集上的檢測準確率逐漸達到瓶頸. 傳統方法的弊端也展現出來,主要包括:
算法在區域提案生成階段產生大量冗余的候選框且正負樣本失衡;
特征提取器如HOG、SIFT等未能充分捕捉圖像的高級語義特征和上下文內容;
傳統檢測算法分階段進行,整體缺乏一種全局優化策略
目標檢測數據集
目前主流的通用目標檢測數據集有PASCAL VOC、ImageNet、MS COCO、Open Images和Objects365。
目標檢測評價指標
當前用于評估檢測模型的性能指標主要有幀率每秒(Frames Per Second,FPS)、準確率(accuracy)、精確率(precision)、召回率(recall)、平均精度(Average Precision,AP)、平均 精度均值(mean Average Precision,mAP)等。
FPS即每秒識別圖像的數量,用于評估目標檢測模型的檢測速度;
accuracy是正確預測類別的樣本數占樣本總數的比例;
precision是預測正確的正樣本數占所有預測為正樣本個數的比例;
recall是預測正確的正樣本數占所有真實值為正樣本個數的比例;
PR曲線是對應precision和recall構成的曲線;
AP是對不同召回率點上的精確率進行平均,在PR曲線圖上表現為 PR 曲線下的面積;
mAP是所有類別AP的平均;
目標檢測模型
基于深度學習的目標檢測方法根據有無區域提案階段劃分為雙階段模型和單階段檢測模型。
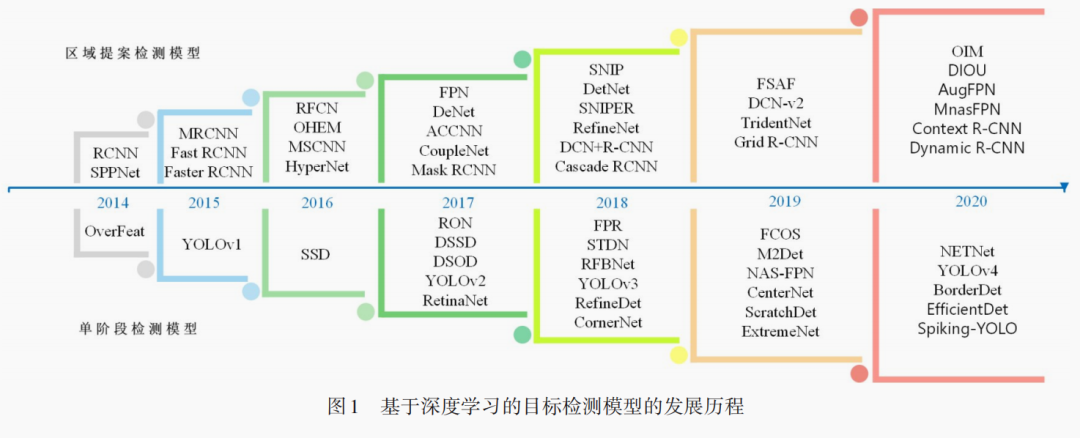
雙階段模型
區域檢測模型將目標檢測任務分為區域提案生成、特征提取和分類預測三個階段。在區域提案生成階段,檢測模型利用搜索算法如選擇性搜索(SelectiveSearch,SS)、EdgeBoxes、區 域 提 案 網 絡(Region Proposal Network,RPN) 等在圖像中搜尋可能包含物體的區域。在特征提取階段,模型利用深度卷積網絡提取區域提案中的目標特征。在分類預測階段,模型從預定義的類別標簽對區域提案進行分類和邊框信息預測。
單階段模型
單階段檢測模型聯合區域提案和分類預測,輸入整張圖像到卷積神經網絡中提取特征,最后直接輸出目標類別和邊框位置信息。這類代表性的方法有:YOLO、SSD和CenterNet等。
目標檢測研究方向
目標檢測方法可分為檢測部件、數據增強、優化方法和學習策略四個方面 。其中檢測部件包含基準模型和基準網絡;數據增強包含幾何變換、光學變換等;優化方法包含特征圖、上下文模型、邊框優化、區域提案方法、類別不平衡和訓練策略六個方面,學習策略涵蓋監督學習、弱監督學習和無監督學習。
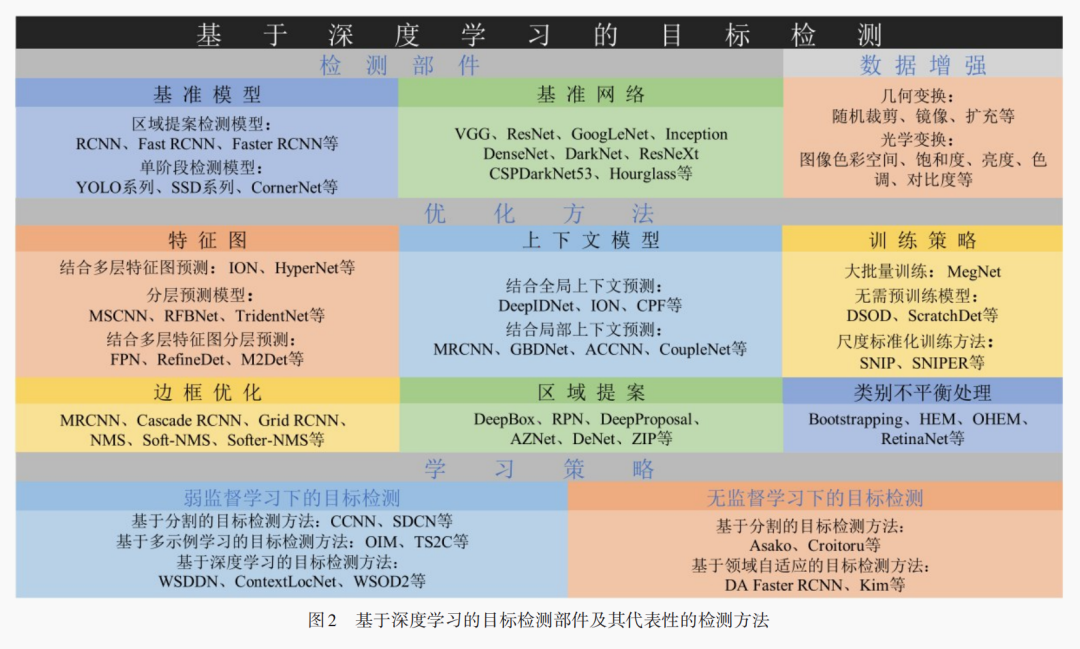
特征圖融合
特征圖是圖像經過卷積池化層輸出的結果,大多數基準檢測模型只在頂層特征圖做預測,這在很大程度上限制了模型的性能。
多層特征圖單層預測模型
分層預測模型
結合多層特征圖多層預測模型
上下文信息融合
在物體遮擋、背景信息雜亂或圖像質量不佳的情況下,根據圖像的上下文信息能更有效更精確地檢測。
全局上下文信息
局部上下文信息
邊框優化
當前檢測模型在小目標檢測表現不佳的主要原因是定位錯誤偏多,包含定位偏差大和重復預測。
優化邊框定位
NMS優化
類別不均衡優化
類別不平衡的主要矛盾是負樣本數遠多于正樣本數,導致訓練的深度模型效率低。
Online Hard Example Mining,OHEM
Focal Loss損失函數
審核編輯 :李倩
-
算法
+關注
關注
23文章
4784瀏覽量
98076 -
目標檢測
+關注
關注
0文章
233瀏覽量
16496 -
數據集
+關注
關注
4文章
1236瀏覽量
26201
原文標題:小白學CV:目標檢測任務和模型介紹
文章出處:【微信號:vision263com,微信公眾號:新機器視覺】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
YOLO5目標檢測方案-基于米爾RK3576開發板
廣和通發布端側目標檢測模型FiboDet
AIcube1.4目標檢測模型導入yolotxt格式數據集后一直顯示數據正在解析,為什么?
使用aicube進行目標檢測識別數字項目的時候,在評估環節卡住了,怎么解決?
【VisionFive 2單板計算機試用體驗】在 VisionFive 2 上為目標檢測準備軟件環境并運行 MobileNet-SSD 模型
基于FPGA的SSD目標檢測算法設計

氣密性檢測儀的核心應用范疇及其所針對的檢測目標

基于LockAI視覺識別模塊:C++目標檢測
基于LockAI視覺識別模塊:C++目標檢測




 工商網監
工商網監
評論