 如何讓自動駕駛汽車“認得路”
如何讓自動駕駛汽車“認得路”

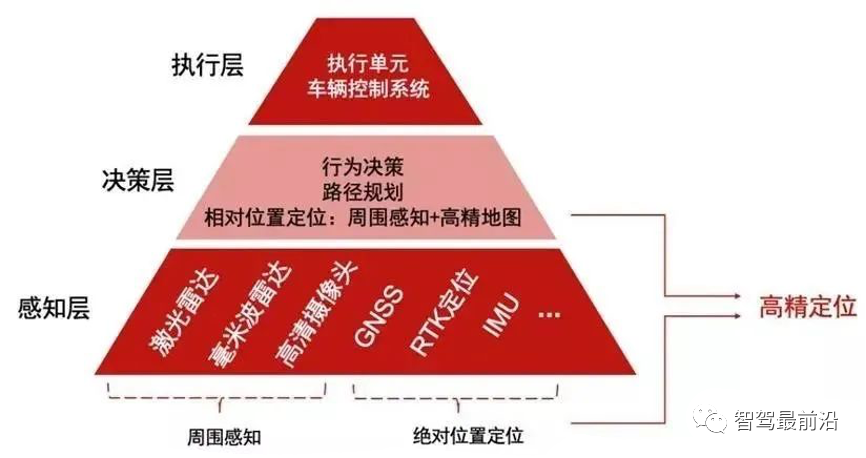
與人類行走一樣,自動駕駛汽車想要完成出行過程也需要有獨立思考,可以對交通環境進行判斷、決策的能力。隨著高級輔助駕駛系統技術的提升,駕駛員駕駛汽車的安全性不斷提高,駕駛員參與駕駛決策的程度也逐漸降低,自動駕駛離我們越來越近。自動駕駛汽車又稱為無人駕駛車,其本質就是高智能機器人,可以僅需要駕駛員輔助或完全不需要駕駛員操作即可完成出行行為的高智能機器人。自動駕駛主要通過感知層、決策層及執行層來實現,作為自動化載具,自動駕駛汽車可以通過加裝的雷達(毫米波雷達、激光雷達)、車載攝像頭、全球導航衛星系統(GNSS)、實時動態(PTK)、慣性測量單元(IMU)等硬件設備感知交通環境,并對探測到的交通環境進行判斷,自動駕駛汽車可以根據探測到的交通環境進行行為決策和路徑規劃,繼而對執行單元發送指令來操控自動駕駛汽車的行駛。
自動駕駛汽車的實現并不是我們想象的那么簡單,想要讓自動駕駛汽車達到老司機的駕駛能力,除了要讓自動駕駛汽車可以“看得清”(感知層)、“想得明”(決策層)、“邁得腿”(執行層)外,還需要“認得路”,高精度地圖就是自動駕駛汽車“認得路”的制勝法寶了!與人們到達陌生城市后,會使用地圖導航一樣,自動駕駛汽車想要實現自動駕駛,也需要解決哪里走、如何走、怎么走等問題。給自動駕駛汽車發出出行指令后,首先要做的就是規劃好道路。人類使用的導航地圖更注重的是街道名稱和路徑等信息,只記錄道路形狀、坡路、曲率、鋪設、方向等數據,人類可以根據這些信息了解自己需求的出行路徑。與人類使用的導航地圖不同的是,自動駕駛汽車的高精度地圖涵蓋的信息更多、更全。高精度地圖是一種精度可達到厘米級(人類使用的導航地圖精度僅為米級),提供元素更加豐富、更新頻率更快的高精度、高維度、高豐富度、高新鮮度的電子地圖,可以提供超視距環境感知能力并提供車道級別最優路徑規劃的電子地圖,可以確保自動駕駛汽車行駛過程中的安全性。高精度地圖除了包含人類使用導航地圖所涵蓋的信息外,還增加了車道屬性相關的數據,如車道線類型、車道寬度等數據,還有諸如高架物體、防護欄、道路邊緣信息、路側障礙物(樹、垃圾桶、電線桿等)及路邊地標等大量數據。
高精度地圖作為讓自動駕駛汽車“認得路”的必要輔助,包含了大量的駕駛信息,其中最重要的就是道路網的精確三維表征,除了道路信息外,還包含了很多語義信息,包括信號燈的顏色、道路限速信息、車輛轉彎位置等。高精度地圖的出現和發展將促進智慧交通、智慧城市、智能交通的布局,隨著智能網聯技術的發展,高精度地圖的重要性愈發明顯,對于達到L4,甚至L3級別的自動駕駛汽車而言,高精度地圖的搭載是必要選項。高精度地圖可以為自動駕駛汽車規劃行駛路徑,可以提供定位、決策、交通動態信息等依據,此外高精度地圖還可以在自動駕駛汽車上感知硬件出現故障或周圍環境比較惡劣時,確保自動駕駛汽車可以安全行駛,高精度地圖可以增強超視距感知、提升自動駕駛汽車規劃能力。
高精度地圖對于自動駕駛汽車來說非常重要,也具有很多優勢。高精度地圖可以為自動駕駛汽車提供道路先驗信息和冗余定位保障,與車載傳感器不同的是,高精度地圖不受天氣環境、探測距離等影響和限制,可以為自動駕駛汽車提供安全冗余。高精度地圖中由于涵蓋了車道線、道路標識牌、紅綠燈等位置信息,可以預知相關信息,提高感知硬件的探測精度和速度,如在路口左轉(靠右行駛交通規則下)是自動駕駛汽車研發過程中較為難以解決的一個問題,高精度地圖的輔助,可以告知自動駕駛汽車哪些路口可以左轉,左轉待轉區、左轉停止線在哪里等。此外作為車聯網發展的一部分,高精度地圖可以將車輛信息,紅綠燈狀態信息、道路交通流量信息等傳遞至云端,從而實現智能交通的規劃和布局。高精度地圖需要存儲靜態和動態的車輛環境數據與交通環境數據,如果都放在一張圖層內將不利于制作,也不利于使用,因此需要使用標準化的分層,每一層體現一種環境要素或交通要素,并將所有圖層進行疊加,從而形成可用的高精度地圖。現階段高精度地圖可以分為兩個圖層,即靜態數據層和動態數據層,靜態數據層自下而上又可以細分為車道模型、道路部件、道路屬性三個矢量子層以及一個道路環境特征子層。
動態數據層基于智能網聯技術,實時獲取交通運行數據、交通管理數據集人、車實時運動數據,因此由下往上可以分為交通運行數據層、交通管理數據層及高動態運動層。高精度地圖的制作采集與人類使用的導航地圖有著很大的區別,高精度地圖的采集系統成為“移動測量系統”,相較于人類使用的導航地圖,高精度地圖更加專注于自動駕駛場景,是自動駕駛解決方案中不可或缺的一環。由于高精度地圖對于數據的實時更新要求度極高,完全使用采集車進行高精度地圖的采集將是費事費力且高成本的,一輛高精度地圖采集車主要配置的是激光雷達、車載攝像頭、陀螺儀、數據存儲和計算設備等,一輛高精度地圖采集車所能采集的范圍極低,如果想要全面鋪設采集,這將是巨大的成本。對于高精度地圖的編譯也是非常耗時耗力的,高精度地圖的編譯過程包括地圖繪制、地圖矯正、更新POI信息、更新互聯網用戶報錯等,這就需要大量的人力成本。對于不同道路環境的高精度地圖采集,所需要的人力成本和時間成本也不一樣,如高速公路與城市道路的高精度地圖采集就有很大的區別,相較于高速公路,城市道路更加開放,場景也更加復雜,涵蓋的交通信息也更多,對于自動駕駛能力也提出了更高的要求,也更具挑戰,此時高精度地圖將發揮更加重要的作用。
高精度地圖可以將復雜的交通環境進行解構,將人類出行規則按照自動駕駛汽車可以理解的方式進行傳遞,將復雜的出行動作劃分為多個小任務,降低或優化感知硬件對于交通探測的要求。由于高精度地圖中涵蓋各車道的關聯信息,可以讓自動駕駛汽車可以提前預測其他車道或方向車輛的駕駛行為,保障自動駕駛汽車可以根據交通規則安全行駛。高精度地圖除了為自動駕駛汽車提供導航作用外,還為自動駕駛汽車安全行駛發揮極大的作用,如高精度地圖可對自動駕駛汽車在城市隧道、高架等環境中提供輔助,在這些場景下,可以讓自動駕駛汽車利用高精度地圖,通過以高精度地圖中交通設備作為參考點,結合感知硬件來實現自主定位,大大提高自動駕駛行駛的安全性。對于長期不進行維護,車道線缺失的交通環境中,高精度地圖可以通過定位和輔助,確保自動駕駛汽車可以在規劃車道內行駛。對于大霧、暴雪等極端天氣下,感知硬件的探測精度將進一步降低,高精度地圖則可以提供更多的交通信息補充。多變的道路狀況也是使用高精度地圖的必要原因之一,如在很多城市為優化交通環境,會設置潮汐車道,還會不同道路設置限速,這時就可以通過高精度地圖提前進行路徑規劃,讓自動駕駛汽車遵循交通規則行駛。
高精度地圖的發展現階段依然存在很多問題,比如現階段并沒有一個統一的高精度地圖平臺,各駐車廠之間高精度地圖信息并不是共用的,這就增加了高精度地圖的采集成本,建立統一高精地圖的數據模型與交換格式,將有助于減少汽車制造商的開發時間和不必要的成本,同時保證未來跨品牌車輛使用的高清地圖都可以不斷共享刷新數據。高精度地圖的采集成本較高,而且更新也比較慢,現在階段,高精度地圖采集測繪數據的方式主要有2大技術路線,一種以谷歌的地圖測繪車為代表,另一種則以特斯拉的“車隊學習網絡”(FleetLearning Network)為代表,相當于利用量產車,把測繪任務“眾包”出去,調動整個車隊的所有傳感器來收集數據,并通過云技術上傳到中央數據庫,最終每一輛車都是地圖數據貢獻者,也是獲得者。交通環境的改變,如道路的升級改造、路側設備的升級優化,都需要高精度地圖實時更新,而這將是非常難的,如何確保高精度的更新頻率也是現階段高精度地圖發展亟需討論的問題。對于高精度地圖,大家怎么看?歡迎關注智駕最前沿,并留言交流。
-
GNSS
+關注
關注
9文章
985瀏覽量
51035 -
自動駕駛
+關注
關注
793文章
14845瀏覽量
179107 -
高精度地圖
+關注
關注
1文章
21瀏覽量
3179
發布評論請先 登錄
自動駕駛汽車如何實現自動駕駛

2026年自動駕駛汽車發展趨勢前瞻

自動駕駛汽車如何檢測石頭這樣的小障礙物?

世界模型是讓自動駕駛汽車理解世界還是預測未來?

汽車自動駕駛的太陽光模擬應用研究

自動駕駛汽車如何確定自己的位置和所在車道?

如何確保自動駕駛汽車感知的準確性?

塑造自動駕駛汽車格局的核心技術
自動駕駛汽車是如何準確定位的?

卡車、礦車的自動駕駛和乘用車的自動駕駛在技術要求上有何不同?

自動駕駛安全基石:ODD




 工商網監
工商網監
評論