 解決自動駕駛的關鍵挑戰
解決自動駕駛的關鍵挑戰

“自動駕駛”技術建立在特定的駕駛員輔助功能之上,例如自適應巡航控制或防撞、臨時監督自動駕駛儀,以及完全自動駕駛車輛,能夠在完全沒有人為干預的情況下從頭到尾完成旅程。
美國汽車工程師協會 (SAE) 定義的五個自動駕駛級別(圖 1)有助于將機器參與駕駛車輛的程度日益提高,更重要的是,也許是未來。
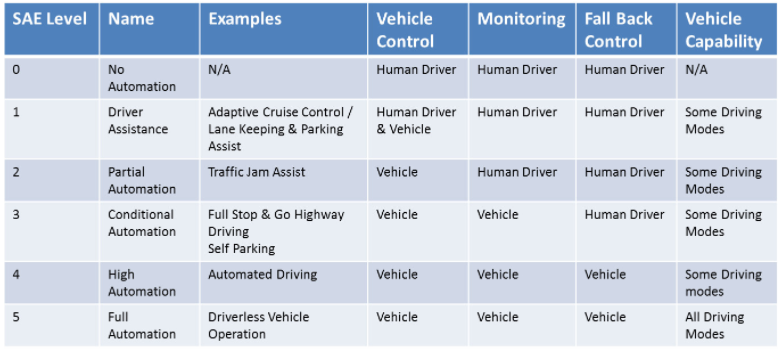
圖 1.美國 SAE 定義的 SAE 汽車自主級別。
通過這些不同的級別,顯然需要越來越準確的態勢感知。物體識別、空間感知和定位等任務是人類的核心技能,由于摩爾定律在芯片處理能力與成本和功耗之間的關系,現在才開始克服在機器中復制這些任務的挑戰。
然而,得益于這一進步,最高水平的全自動駕駛汽車觸手可及。事實上,一些備受矚目的自動駕駛汽車項目已經完成了超過 100 萬英里的全自動駕駛,僅記錄了少數事故。
基于改善道路安全的理由,自動駕駛汽車有充分的理由。由于超過 80% 的道路交通事故是由人為錯誤造成的,因此取消人為決策可能會降低事故率。挑戰在于消除人為錯誤,而不會引入不可接受的機器錯誤水平。在這個最神圣的人類活動中,對機器錯誤的容忍度將是極低的。
必須在確保設計及其所有元素安全的框架內開發更高 SAE 級別的自動駕駛系統。汽車安全標準 ISO 26262 通過定義一組汽車安全完整性等級 (ASIL) 和相關的允許故障率,提供了任何自主系統開發必須遵守的框架。此外,未來車輛上的自動駕駛系統也將受到從熱帶高溫到北極寒冷等一系列惡劣環境的影響,包括發動機高溫、熱循環、高振動、沖擊、濕度、灰塵等,挑戰可操作性和可靠性。因此,除了極其強大、快速和節能之外,
多種傳感方式——系統的眼睛、耳朵等
就像人類駕駛員依靠視覺信息以及聲音、身體上的力甚至嗅覺來在各種環境中控制車輛并預測事件一樣,自主系統依靠多種傳感方式來提供原始數據用于決策。該機器比人類有一個優勢,因為它可以提供更多的感官來增強在視覺光譜中工作的相機和類似于人類平衡、運動和定位感覺的慣性傳感器。這些包括雷達、激光雷達、超聲波、紅外線、GPS 以及無線 V2X 數據,可以提供對看不見的危險的意識。
在所有這些傳感模式(系統的眼睛、耳朵等)的連接處,是一個中央處理模塊 (CPM),它必須根據來自各個通道的所有數據流連續做出實時決策。正是這個模塊的能力定義了系統能力的限制,就可以安全執行的自動駕駛模式而言。
處理系統架構
圖 2 說明了 CPM 將原始傳感器數據轉換為安全且適當的自動駕駛決策所需的功能。
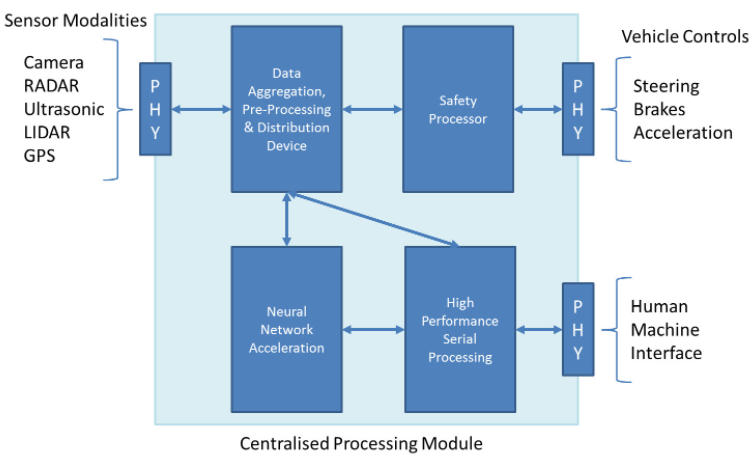
圖 2. 自動駕駛和全自動駕駛汽車的集中處理模塊架構。
在顯示的功能中,數據聚合、預處理和分發 (DAPD) 塊與不同的傳感器模式接口,以在處理單元和處理單元內的加速器之間執行基本處理、路由和信息交換。
高性能串行處理根據其輸入執行數據提取、傳感器融合和高級決策。在某些應用中,神經網絡將在高性能串行處理中實現。
安全處理根據 DAPD 設備中的預處理提供的檢測環境以及神經網絡加速和高性能串行處理元件的結果執行實時處理和車輛控制。
創建 CPM 給設計人員帶來了幾個接口、可擴展性、合規性和性能挑戰。當然,嚴格的 SWaP-C 限制(尺寸、重量和功率 - 成本)總是伴隨著汽車領域。此外,隨著更高級別的自動駕駛系統通過認真的原型設計和早期部署,可預期適用的標準、最佳實踐和機器學習算法將迅速發展。
為了克服這些挑戰,我們可以設想一個集成的可編程解決方案,它不僅可以處理 DAPD 的接口、預處理和路由功能,而且還可以在同一設備中集成某些安全處理功能和潛在的神經網絡機器學習功能。硅或作為獨立的硬件加速器設備。這一機會正在推動新型汽車級可編程多處理器片上系統 (MPSoC) IC 的出現,該 IC 不僅利用摩爾技術將多個應用處理器內核和實時處理器內核與高度并行化的可編程邏輯集成在一起, 和高帶寬行業標準接口,都在同一個芯片上。
借助兩個鎖步內核,實時處理單元 (RPU) 能夠處理高達 ASIL-C 的安全關鍵功能。為了提供必要的功能安全,這樣的 RPU 還需要能夠減少、檢測和緩解單個隨機故障,包括硬件和單事件引發的故障。
安全處理器需要直接與車輛控制進行交互,例如轉向、加速和制動。顯然,在這個子系統中避免處理錯誤是至關重要的。除了內核的鎖步功能外,其他重要的緩解措施包括支持緩存和內存上的糾錯碼 (ECC),以確保實現自動駕駛車輛控制所需的應用程序和數據的完整性。開機期間的內置自檢 (BIST) 對于確保底層硬件在運行前沒有故障以及在發現有缺陷時在設備內功能隔離內存和外圍設備的能力也很重要。
就與整個車輛的傳感器模式的接口而言,典型的高速接口將包括 MIPI、JESD204B、LVDS 和千兆以太網 (GigE),用于相機、雷達和激光雷達等高帶寬接口。MPSoC IC 通常包含靈活的 I/O,可配置為直接與 MIPI、LVDS 和千兆位串行鏈路連接,從而使更高級別的協議在可編程邏輯架構中實現,通常使用 IP 內核。CAN、SPI、I2C 和 UART 等接口已經在汽車應用領域建立起來,并作為設備處理系統中的即用型功能提供。
在 MPSoC 器件的可編程邏輯結構中實施適用協議還可以輕松整合標準的任何修訂或更新,同時為解決方案中支持的特定傳感器接口的數量提供靈活性。
機器學習駕駛
人類每次駕駛都會獲得知識和經驗,我們訓練的自動駕駛機器也將如此,以駕駛未來幾代車輛。機器學習將在自動駕駛中發揮重要作用,以幫助在與以前遇到的任何情況相似(盡管很少,如果有的話)相同的情況下做出決策。
圖像識別是目前機器學習神經網絡在自動駕駛中最重要的用途之一,可幫助車輛識別重要物體,如其他車輛、行人、易受傷害的道路使用者(如騎自行車的人)、路口、十字路口、路標、障礙物等物體在路上,和其他危險。在車輛行駛時,獲得這些分析的結果是時間緊迫的,并將推動對低功耗嵌入式實時機器學習系統的需求。
幀/秒/瓦是嵌入式神經網絡實現的關鍵品質因數。輕量級的板載神經網絡可以使用 C、C++ 和 OpenCL 等高級語言在 FPGA 中實現,從而可以將功能從處理器系統無縫轉移到可編程邏輯。神經網絡的構建者已經發現可編程邏輯中 FPGA 處理的高度并行特性,再加上沒有外部內存瓶頸,與圖形處理器單元 (GPU) 等替代架構相比,具有更高的確定性和響應能力。
增加幀/秒/瓦的其他工作表明,與卷積 CNN 等更傳統的模型相比,像脈沖神經網絡 (SNN) 這樣的下一代模型可以提高吞吐量并降低功耗。多個 SNN 內核已在 FPGA 中成功實例化,以處理大量視頻通道、每秒高幀數和僅幾瓦的低功耗。
結論
完全自動駕駛汽車的路線圖已經成熟,并且已經經歷了從基本駕駛輔助系統開始的多個自動駕駛級別。顯然,安全性至關重要,但可行的計算平臺還必須應對極端的 SWaP-C 挑戰。多處理器片上系統 IC 中的高度并行和可重新編程處理可以滿足下一代自動駕駛和完全自動駕駛系統的需求。這些設備還集成了合適的安全處理器,能夠滿足 ISO 26262 等行業安全標準,能夠滿足最高級別自動駕駛的關鍵系統要求。
審核編輯:郭婷
-
處理器
+關注
關注
68文章
20252瀏覽量
252225 -
機器學習
+關注
關注
66文章
8553瀏覽量
136931 -
自動駕駛
+關注
關注
793文章
14880瀏覽量
179798
發布評論請先 登錄
自動駕駛汽車如何實現自動駕駛

Transformer如何讓自動駕駛大模型獲得思考能力?
如何設計好自動駕駛ODD?
自動駕駛BEV Camera數據采集系統:高精度時間同步解決方案

汽車自動駕駛的太陽光模擬應用研究

不同等級的自動駕駛技術要求上有何不同?
想實現自動駕駛,哪些技術非常關鍵?
塑造自動駕駛汽車格局的核心技術
太陽光模擬器 | 在汽車自動駕駛開發中的應用
卡車、礦車的自動駕駛和乘用車的自動駕駛在技術要求上有何不同?

自動駕駛是為了“增強人”,還是為了“替代人”?
自動駕駛安全基石:ODD
新能源車軟件單元測試深度解析:自動駕駛系統視角




 工商網監
工商網監
評論