") Hyperion 9自動(dòng)駕駛的開(kāi)放參考架構(gòu)
Hyperion 9自動(dòng)駕駛的開(kāi)放參考架構(gòu)

Hyperion 9:自動(dòng)駕駛的開(kāi)放參考架構(gòu)
DRIVE Hyperion 9 是一個(gè)開(kāi)放的下一代平臺(tái),圍繞公司的 Atlan SoC 設(shè)計(jì),用于智能駕駛和車(chē)內(nèi)功能。它是 DRIVE Hyperion 系列汽車(chē)和自動(dòng)駕駛汽車(chē)開(kāi)發(fā)平臺(tái)和參考架構(gòu)中的最新產(chǎn)品,利用了來(lái)自大陸、海拉、Luminar、索尼和法雷奧等領(lǐng)先汽車(chē)供應(yīng)商的內(nèi)部和外部傳感器套件。
其目標(biāo)是加速 4 級(jí)自動(dòng)駕駛特性和功能的設(shè)計(jì)
DRIVE Hyperion 參考平臺(tái)的早期版本是2021 GTC 主題演講的焦點(diǎn),包括 12 個(gè)攝像頭、12 個(gè)超聲波傳感器、9 個(gè)雷達(dá)和一個(gè)前置激光雷達(dá),這些激光雷達(dá)由傳感器抽象工具增強(qiáng),允許自動(dòng)駕駛汽車(chē)制造商定制他們的設(shè)計(jì)。
版本 9 建立在該傳感器套件之上,具有:
環(huán)繞成像雷達(dá)
更新了具有更高幀速率的外部攝像頭
兩個(gè)額外的側(cè)面激光雷達(dá)
超聲波底盤(pán)傳感器
三個(gè)內(nèi)部攝像頭和一個(gè)雷達(dá)用于占用感應(yīng)
DRIVE Hyperion 9 自動(dòng)駕駛傳感器有效載荷現(xiàn)在共有 14 個(gè)攝像頭、9 個(gè)雷達(dá)、3 個(gè)激光雷達(dá)和 20 個(gè)超聲波。
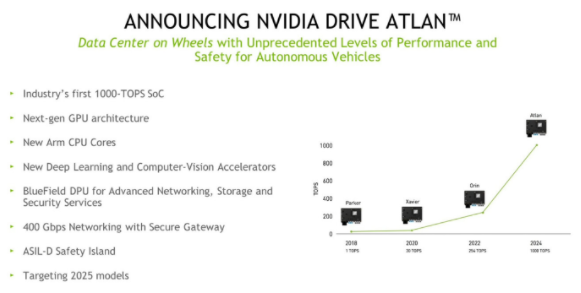
該架構(gòu)的 Atlan SoC “大腦”能夠達(dá)到 1,000 TOPS 的性能,并提供大于 100 的 SPECint 基準(zhǔn)測(cè)試分?jǐn)?shù) (SPECrate2017_int)。得益于新的 GPU 架構(gòu)、升級(jí)的 Arm CPU 以及深度學(xué)習(xí)和視覺(jué)加速器,這意味著在相同功耗下,性能比前幾代產(chǎn)品提高了 4 倍。新的 SoC 還集成了 ASIL-D 級(jí)安全島和 NVIDIA BlueField 數(shù)據(jù)處理單元 (DPU),用于在零信任部署中進(jìn)行安全和加密工作負(fù)載處理。
總而言之,Atlan SoC 包含充足的計(jì)算能力,可以為支持 AI 的汽車(chē)運(yùn)行冗余和多樣化的 DNN,這些汽車(chē)可以擴(kuò)展到未來(lái)。
NVIDIA 將于 2023 年開(kāi)始在 Atlan SoC 上進(jìn)行生產(chǎn),DRIVE Hyperion 9 平臺(tái)將于 2024 年進(jìn)行開(kāi)發(fā),以部署到 2026 年的量產(chǎn)車(chē)輛中。幸運(yùn)的是,該堆棧軟件與現(xiàn)有的基于 Orin SoC 的 Hyperion 平臺(tái)兼容,可將現(xiàn)有代碼無(wú)縫移植到新參考架構(gòu)的升級(jí)硬件上。
DRIVE 地圖:從公路到云端再返回
除了本地 ADAS 功能之外,DRIVE Hyperion 平臺(tái)預(yù)計(jì)實(shí)現(xiàn) 4 級(jí)以上自動(dòng)駕駛的方式之一是通過(guò)創(chuàng)建地圖。具體來(lái)說(shuō),NVIDIA DRIVE Map。
NVIDIA 將 DRIVE Map 定位為人工智能驅(qū)動(dòng)的自動(dòng)駕駛汽車(chē)的基礎(chǔ)構(gòu)建塊。它是一個(gè)多模式地圖引擎和平臺(tái),能夠以超過(guò) 5 厘米的精度更新具有實(shí)時(shí)、真實(shí)世界路況(包括車(chē)道位置、障礙物等)的車(chē)輛地圖。
當(dāng)然,自動(dòng)駕駛汽車(chē)的導(dǎo)航只與它的地圖一樣好,而地圖也只與它們所基于的數(shù)據(jù)一樣好。DRIVE Map 使用雙管齊下的方法來(lái)收集地面實(shí)況,包括從當(dāng)今道路上的車(chē)輛眾包稀疏攝像頭數(shù)據(jù),并從配備 DRIVE Hyperion 平臺(tái)的測(cè)繪車(chē)隊(duì)獲取詳細(xì)的 3D 激光雷達(dá)和雷達(dá)數(shù)據(jù),該平臺(tái)計(jì)劃測(cè)量超過(guò)到 2024 年,北美、歐洲和亞洲的道路將達(dá)到 300,000 英里。
這些輸入用作創(chuàng)建 3D 導(dǎo)航地圖的高清參考 (HDR),該功能部分基于NVIDIA 去年收購(gòu)的DeepMap映射技術(shù)。如下圖所示,這個(gè)過(guò)程包括使用深度神經(jīng)網(wǎng)絡(luò)來(lái)幫助創(chuàng)建自動(dòng)地圖,以及訓(xùn)練感知網(wǎng)絡(luò),這些網(wǎng)絡(luò)使用標(biāo)記的最新地圖數(shù)據(jù)從云端重新部署到車(chē)輛上。
一種新的駕駛方式
NVIDIA 的 DRIVE Hyperion 9 和 DRIVE Map 實(shí)現(xiàn)了不可思議的類(lèi)人傳感功能。這些解決方案將釋放車(chē)輛感知周?chē)h(huán)境的能力,無(wú)論是從自己的道路傳感器、周?chē)钠渌?chē)還是云中收集數(shù)據(jù)。
此次 GTC22 汽車(chē)產(chǎn)品發(fā)布讓我們得以一窺自由和安全性,這將很快促進(jìn)從不干涉到不看路再到專心致志的轉(zhuǎn)變。
審核編輯:郭婷
-
傳感器
+關(guān)注
關(guān)注
2577文章
55259瀏覽量
792819 -
NVIDIA
+關(guān)注
關(guān)注
14文章
5665瀏覽量
109977 -
人工智能
+關(guān)注
關(guān)注
1819文章
50185瀏覽量
266280
發(fā)布評(píng)論請(qǐng)先 登錄
L4級(jí)自動(dòng)駕駛提速,制造鏈可以提前做哪些升級(jí)?
頭部車(chē)企基于NVIDIA DRIVE Hyperion平臺(tái)打造L4級(jí)自動(dòng)駕駛汽車(chē)
自動(dòng)駕駛汽車(chē)如何實(shí)現(xiàn)自動(dòng)駕駛

如何設(shè)計(jì)好自動(dòng)駕駛ODD?

汽車(chē)行業(yè)迎L3自動(dòng)駕駛上路潮,華為、小鵬、理想搶跑#晶揚(yáng)電子 #自動(dòng)駕駛 #L3級(jí)自動(dòng)駕駛 #智能駕駛
NVIDIA與Uber合作推進(jìn)全球L4級(jí)自動(dòng)駕駛移動(dòng)出行網(wǎng)絡(luò)
不同等級(jí)的自動(dòng)駕駛技術(shù)要求上有何不同?
自動(dòng)駕駛公司小馬智行進(jìn)入新加坡市場(chǎng)
端到端自動(dòng)駕駛相較傳統(tǒng)自動(dòng)駕駛到底有何提升?

想實(shí)現(xiàn)自動(dòng)駕駛,哪些技術(shù)非常關(guān)鍵?
低速自動(dòng)駕駛與乘用車(chē)自動(dòng)駕駛在技術(shù)要求上有何不同?

卡車(chē)、礦車(chē)的自動(dòng)駕駛和乘用車(chē)的自動(dòng)駕駛在技術(shù)要求上有何不同?

自動(dòng)駕駛安全基石:ODD
新能源車(chē)軟件單元測(cè)試深度解析:自動(dòng)駕駛系統(tǒng)視角




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論