 自動駕駛和SOA架構下,MCU行業正發生巨變
自動駕駛和SOA架構下,MCU行業正發生巨變

自動駕駛與SOA架構下MCU的變化主要是算力要大幅提升,運行頻率至少在300MHz以上,片上Flash容量不低于20MB,足以運行輕量虛擬機,還要具備矢量運算能力。汽車SOA架構即服務導向架構或軟件定義汽車架構,在硬件領域對應的就是Zonal架構,即中央計算服務器架構,也有稱之為域/區架構。
典型Zonal架構
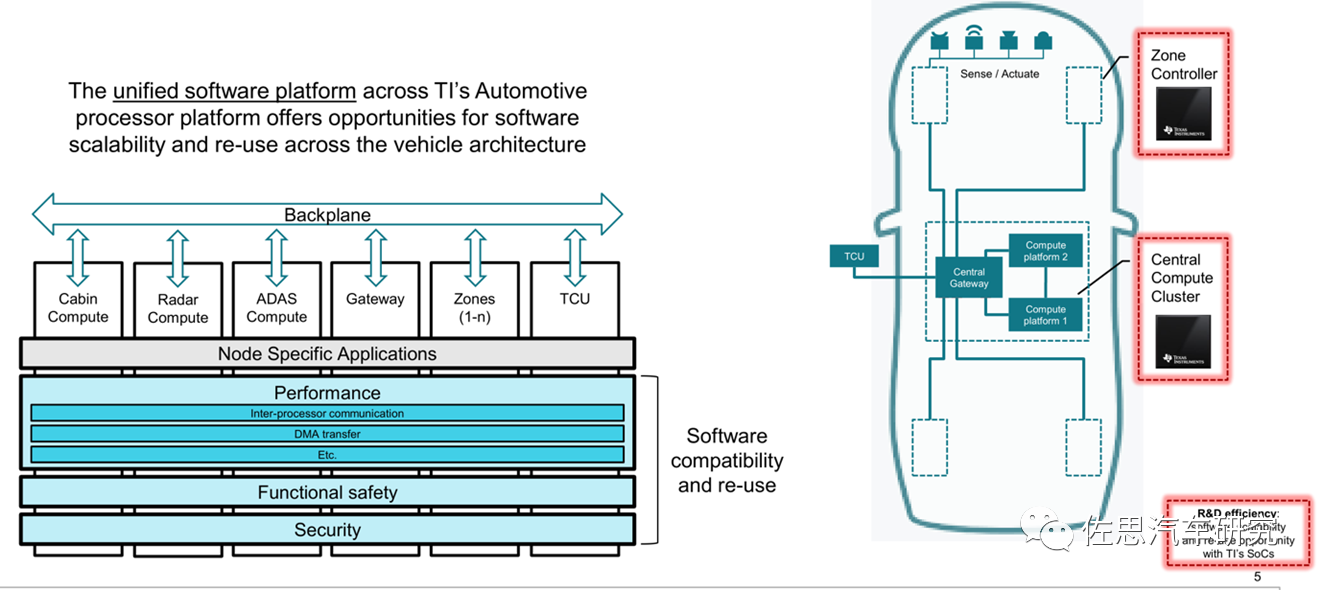
圖片來源:互聯網
整車廠已在分布式架構軟件開發上投入了大量精力財力人力,這是一筆巨大的研發資產,物理上的計算單元只有1-2個,要想復用分布式架構上的軟件成果,邏輯上需要虛擬出原本一個功能對應一個ECU的架構。
大多數現代ECU將運行AUTOSAR(AUTomotive Open System ARchitecture)經典軟件架構,該架構提供了基于軟件組件的集成模型、時間和空間分離、大量的功能安全和信息安全機制,以及通過軟件集群機制的部分更新等。ECU軟件包括來自多方的部件,包括OEM(應用)、Tier 1(中間件和集成)、Tier 2(MCAL,抽象層,通常由硬件芯片廠家提供)和第三方(AUTOSAR BSW、操作系統、安全固件等)。
整車廠的工作主要就是整合來自多個供應商的軟件部件,并使其達到ASIL的C級或D級。最佳解決辦法是使用hypervisor虛擬機,將一個物理ECU變成多個虛擬ECU。在AUTOSAR術語中,每個虛擬ECU是一個單獨的ECU(有自己的EcuExtract),通過COM和虛擬網絡與其他虛擬ECU進行通信。這種解決方案允許每個虛擬ECU像今天一樣,通過保留建立ECU集成模型的松散耦合來進行集成。
每個虛擬機均被單獨編譯和鏈接,每個虛擬機都有自己的RTE。一個RTE配置的改變并不要求整個系統被重新構建。每個虛擬機都有對處理器硬件的完全、虛擬化的訪問。對一個虛擬機的改變不一定需要對整個系統進行重新測試。一個虛擬機可以獨立于整個系統重新啟動,最大限度地減少同一ECU上其他(不相關)功能的停機時間。
每個ECU最后執行或控制的硬件通常是MCU,即虛擬機在MCU上運行,而MCU的運算能力有限,要求虛擬機必須輕量級。這種級別的虛擬機目前主要由三家壟斷,一家是VECTOR的veHypervisor,一家是EATS的RTA-HVR也有寫RTA-LWHVR,LW即輕量級,還有就是EB的corbos。
汽車MCU市場高度集中,按金額計算,2021年前六大廠家市場占有率高達97.5%,前三大廠家市場占有率高達75.6%。瑞薩市場占有率28.8%位居第一,NXP為24.9%,英飛凌為21.9%。德州儀器為7.5%,Microchip為7.4%,意法半導體為7.0%。
瑞薩MCU的生態系統
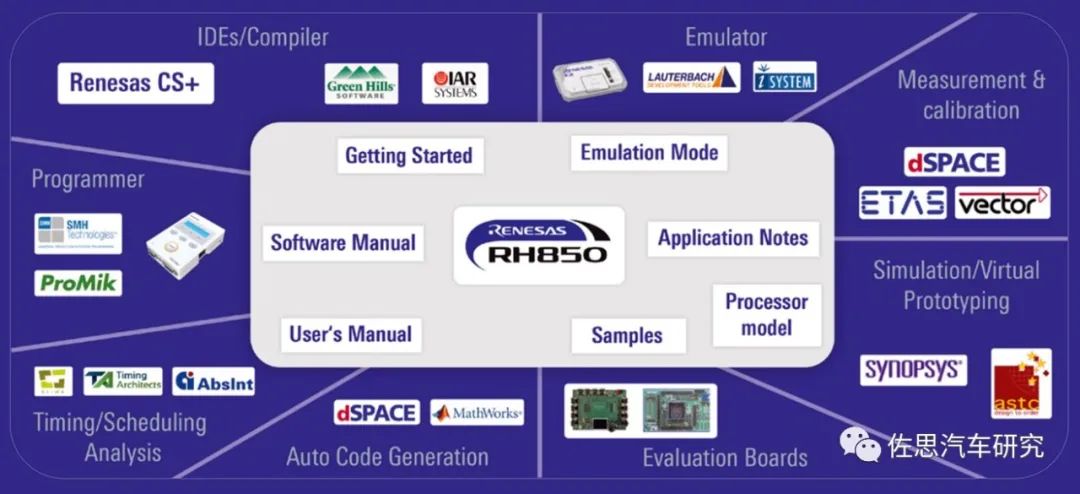
圖片來源:互聯網
之所以集中度如此之高,主要是MCU需要強大的生態系統支持,強者恒強,大者恒大,后進廠家除非通過收購才能切入市場,除此之外自建生態系統非常困難,幾乎不可能。汽車MCU周邊的生態系統主要包括編譯器、時序分析、自動代碼生成、仿真與虛擬原型、測量與標定、模擬器、IDE、匯編器。
國內在RTOS領域,ETAS市場占有率高,非RTOS領域,VECTOR很強。此外還有德國大陸汽車旗下的EB。這兩家都是德國企業,ETAS是博世的全資子公司,或許是因此人們覺得ETAS獨立性欠缺,VECTOR在中間件領域一直獨大。
ETAS目前主要產品是RTA-OSEK,一般公司并不會購買源碼的license,用戶只能得到一個library文件,無法查看具體實現,如果OS出現一些問題,很難去debug。當然大公司會購買源碼,價格驚人。RTA-OSEK具有一個適用于汽車ECU設計所有領域的生產型實時操作系統。它同時采用了AUTOSAR-OS SC1和OSEK/VDX OS V2.2.3標準,并完全符合MISRA C的要求。它具有一個尺寸極小而且運行速度極快的內核,該內核適用于20多種微控制器,包含了所有主流MCU。
2010年ETAS就推出RTA-HVR,最早是基于意法半導體的SPC58ecMCU的,在今年5月,瑞薩選中了RTA-HVR,用在其最新的RH850/U2A/B上,也就是今天的主角。順便說一句,EB的corbos與NXP的S32G系列合作比較密切。
RH850/U2A與瑞薩網關芯片S4構成Zonal核心架構
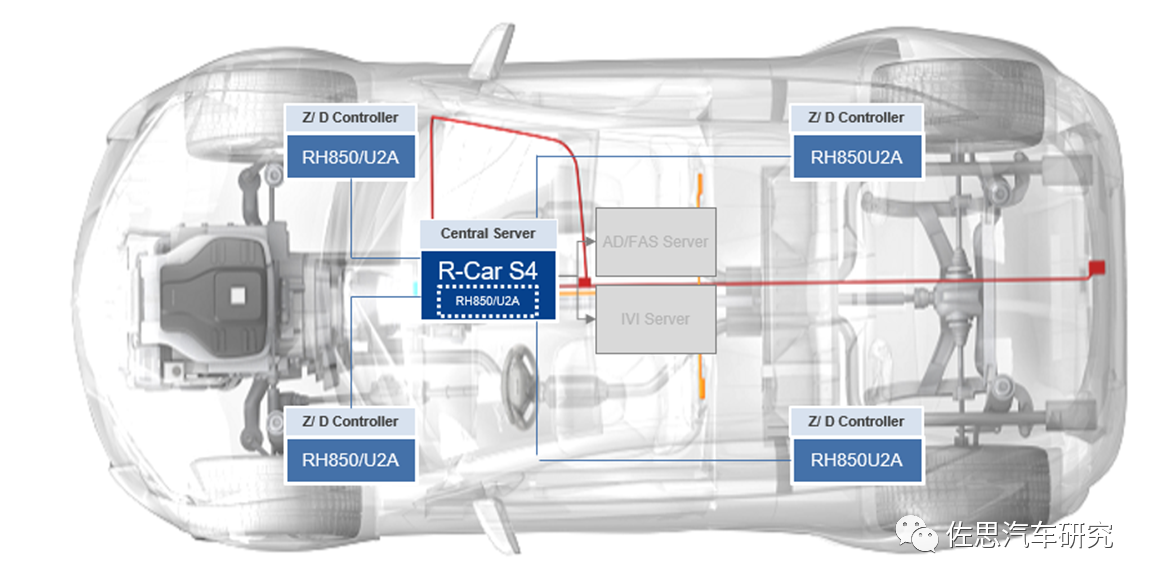
圖片來源:互聯網
圖片來源:互聯網
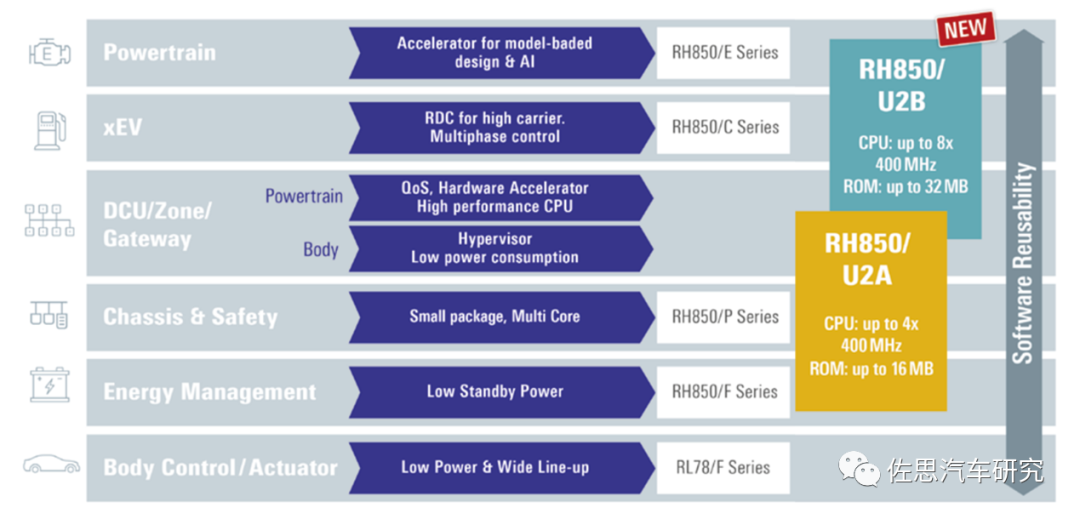
瑞薩新一代MCU產品線分布,這里瑞薩沒有提及儀表和Infotainment領域,因為瑞薩在Infotainment領域近乎壟斷,儀表領域市場占有率也超過50%,因此就無需提及,反而是在電動車底盤領域,英飛凌一家獨大,瑞薩主要就是與英飛凌展開競爭。車身領域則是NXP一家獨大。
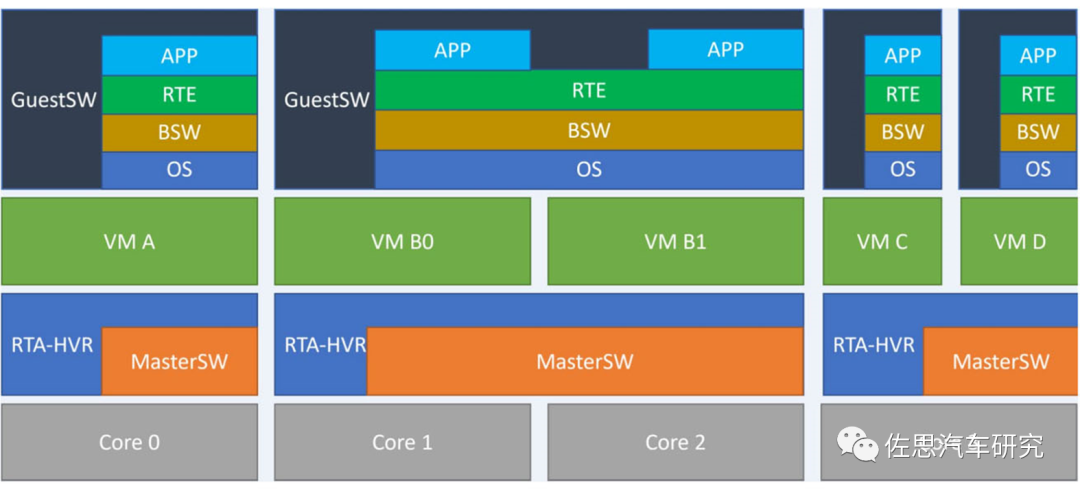
ETAS的RTA-HVR為瑞薩RH850/U2x HW提供了免費軟件支持,以滿足嚴格的汽車功能安全和信息安全要求。RTA-HVR使用瑞薩RH850/U2x系列的硬件虛擬化功能來創建多個虛擬機。每個虛擬機都有一個或多個虛擬CPU內核、一段內存空間和一組外設。每個虛擬機"guest"是一個獨立的可兼容和可閃存的ECU圖像,可以由第三方建立和運送。RTA-HVR支持"bare metal"和AUTOSAR經典平臺guests。RTA-HVR支持靈活的虛擬機與物理CPU核分配。當一個虛擬機對一個(或多個)CPU核有唯一的訪問權時,那么虛擬機的調度開銷為零。當多個虛擬機共享一個CPU核心時,可以選擇以下其中之一,一個靜態配置的輪流調度器;一個由RH850U2x后臺中斷驅動的基于預約的動態調度器。
圖片來源:互聯網
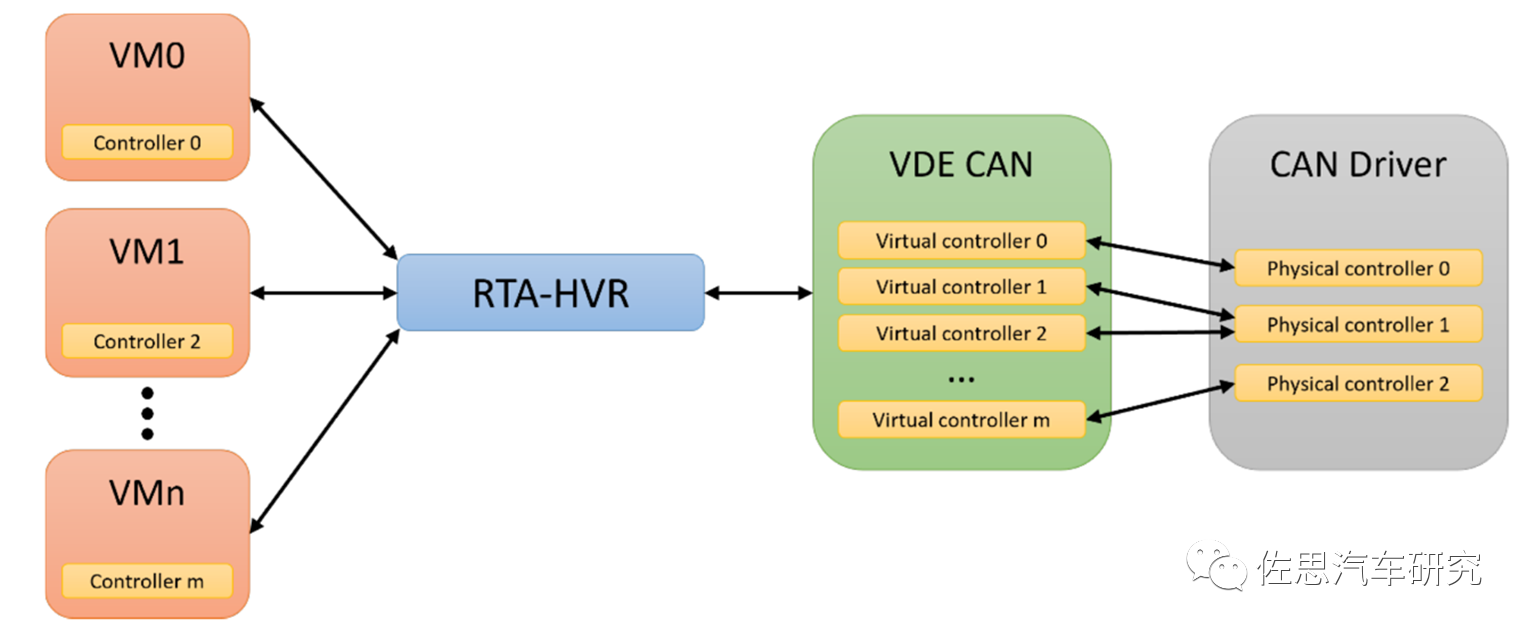
RTA-HVR使用MPU和Guard概念來提供虛擬機之間的空間隔離,為每個虛擬機劃分內存和外設空間。此外,RTA-HVR提供了一種稱為"虛擬設備擴展"(VDE)的機制,允許ECU集成商為特定的Zone ECU定制虛擬和物理外設之間的綁定。VDE提供了一種在虛擬機之間共享外設的安全方式(例如,當需要一個外設的虛擬機數量超過硬件中的物理外設數量時)。這里的典型例子是以太網控制器、HW安全模塊和看門狗或增加額外的CAN通道。
圖片來源:互聯網
圖片來源:互聯網
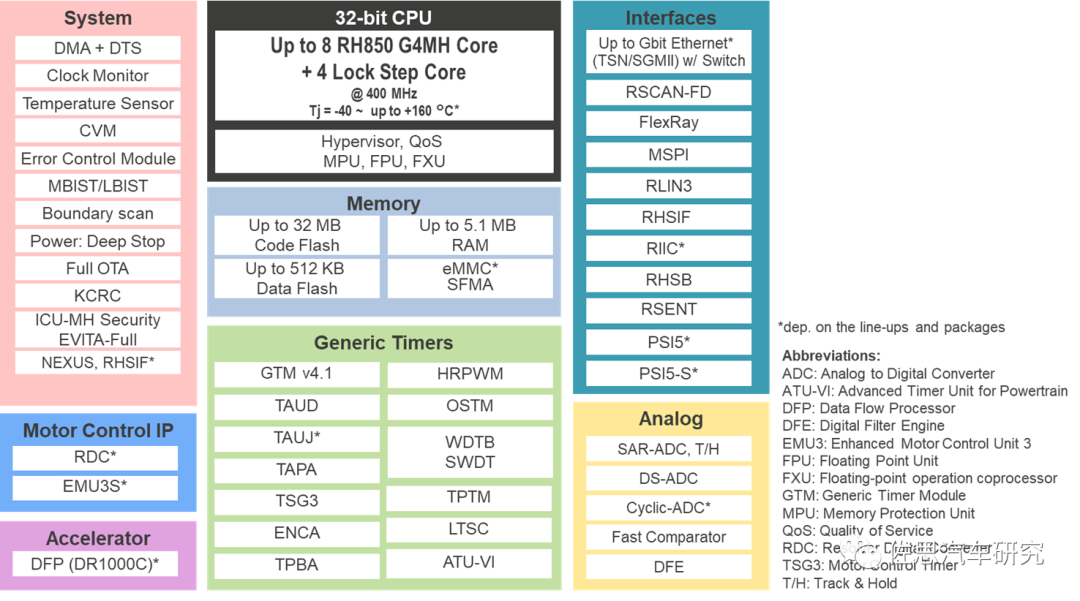
為了流暢運行虛擬機,RH850/U2x系列MCU最高擁有8核,最高支持160度溫度上限,足以在燃油發動機附近運作。同時擁有高達32MB的代碼Flash,通常超過1MB就算是大容量MCU,一般如STM32系列其Flash通常不超過128kB。最高5.1MB的RAM,如此大容量內存會導致成本急劇上升,且設計也具備難度,制造方面也具備難度,盡管瑞薩有12英寸晶圓廠,仍然要委托臺積電生產MCU。
圖片來源:互聯網
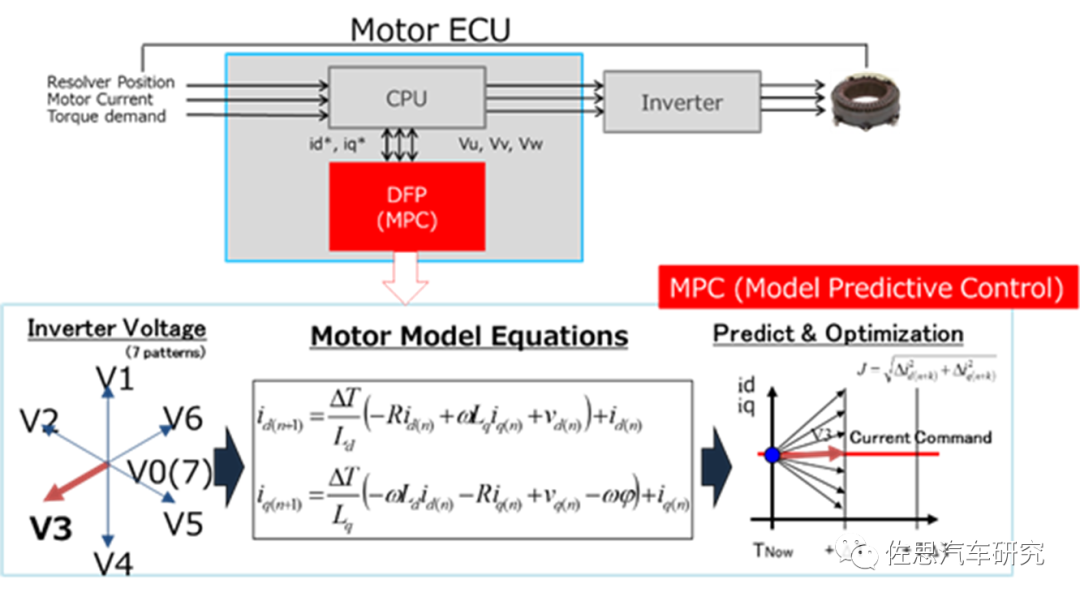
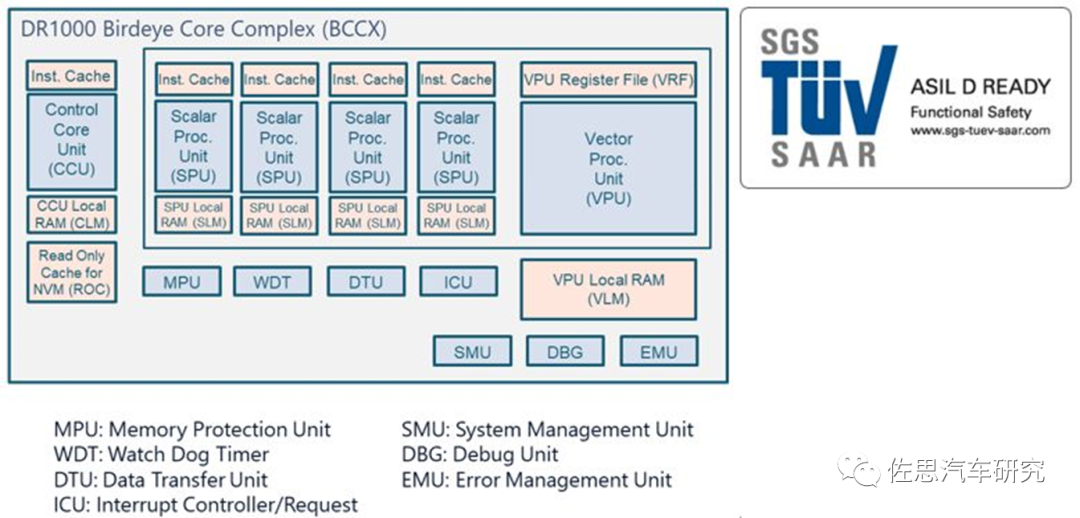
未來自動駕駛肯定是以電動車為基礎的,自動駕駛需要對牽引電機和轉向電機做出復雜的算法控制,簡單的PID肯定是不能用的,能夠落地的主流算法是MPC,即模型預測控制法,這對MCU提出挑戰,瑞薩的RH850/U2x系列特別加入了一個算法加速器,這是一個基于RISC-V的加速器,IP來自NSITEXE的DR1000。NSITEXE是一家日本初創公司,日本的初創半導體公司非常罕見,可謂鳳毛麟角。
圖片來源:互聯網
NSITEXE的DR1000C處理器IP通過了SGS-TüV的ASIL D級認證,在設計中集成了硬件安全特性,使其能夠在沒有任何外部安全機制的情況下滿足ASIL D安全要求。這也是業界首個符合ASIL D級認證要求的、具有矢量擴展功能的RISC-V處理器。其背后功臣還有新思科技的Z01X(功能安全驗證仿真注入機),Z01X解決方案的業界領先性能是其最先進的并發故障仿真算法的直接結果。該算法支持每個可用處理器同時計算數千個故障,從而顯著提升了驗證流程的速度。此外,Z01X解決方案支持ISO 26262汽車功能性安全解決方案所需的所有永久和臨時故障模型。同樣采用Z01X的還有Mobileye。
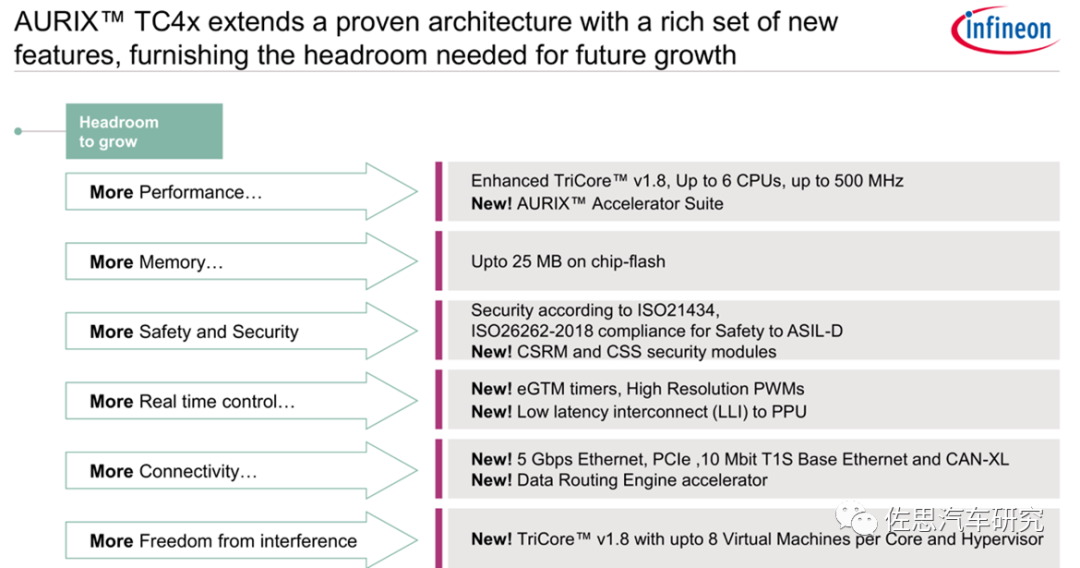
英飛凌的第四代TriCore與瑞薩的RH850/U2A近似。
英飛凌的TC4x系列MCU特色
圖片來源:互聯網
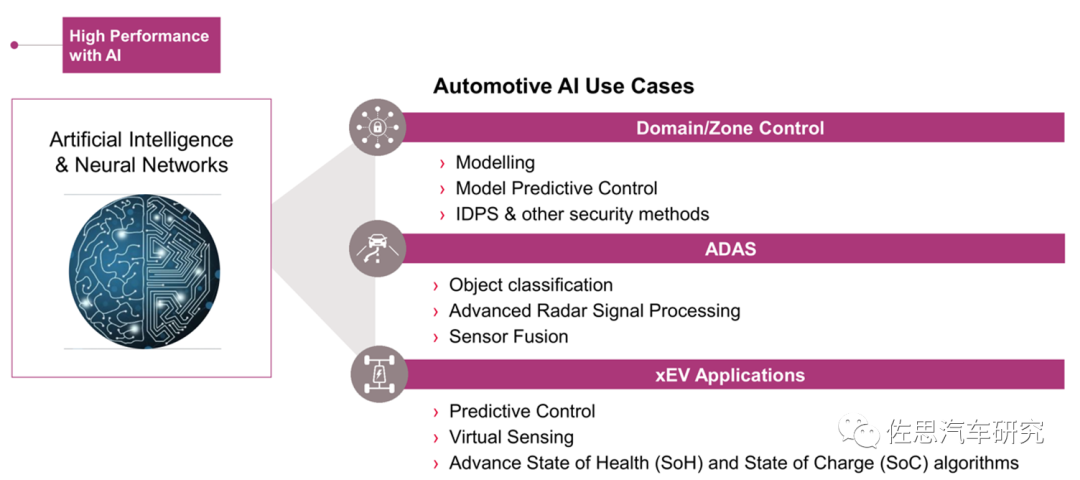
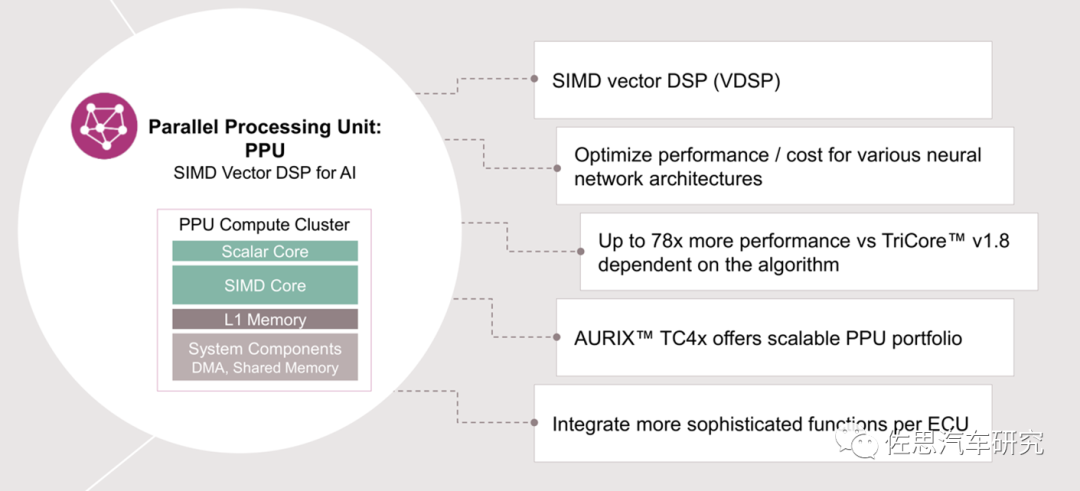
TC4x瞄準汽車AI應用
圖片來源:互聯網
圖片來源:互聯網
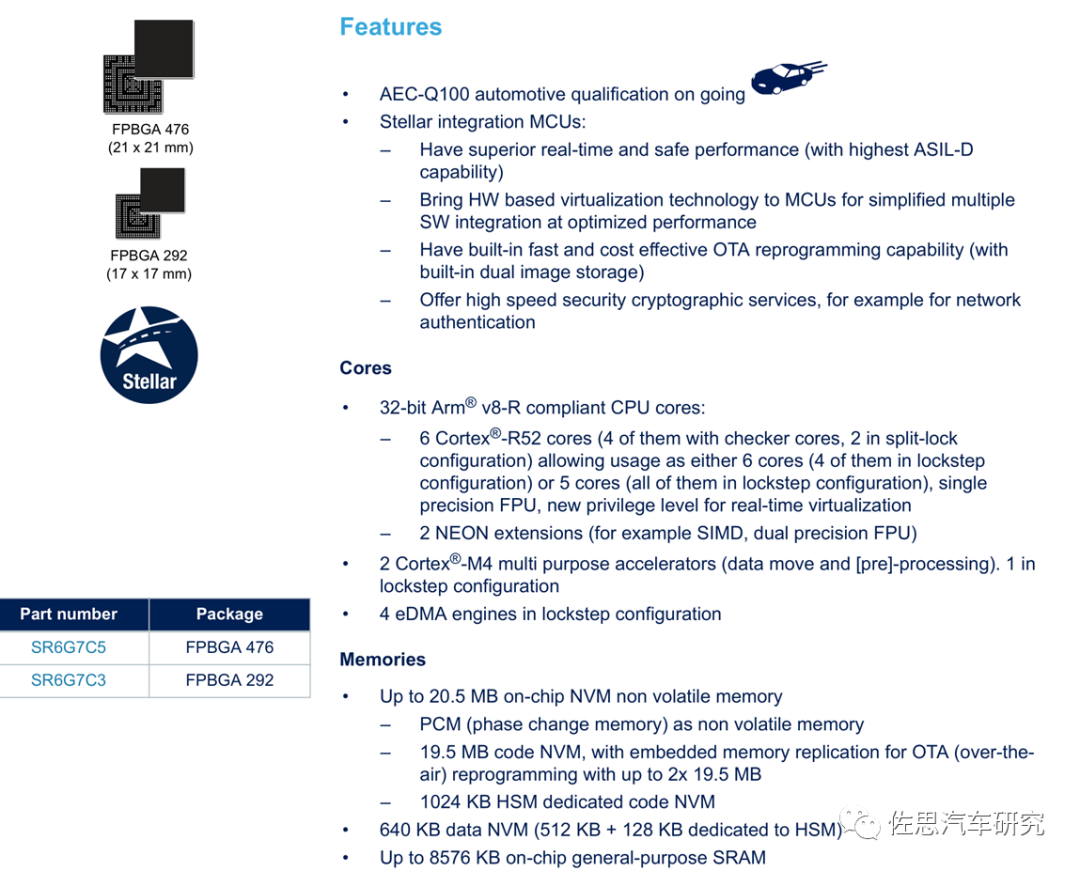
MCU大廠意法半導體也有類似產品,即SR6G7。
圖片來源:互聯網
意法半導體直接用了ARM的NEON擴展,做雙精度FPU,做矢量運算也差不多,R52的算力倒是可能比瑞薩和英飛凌都高,Flash最高20.5MB,比瑞薩和英飛凌低。
NXP就不為所動,它一向不開發太超前的產品,目前MCU系列以S32K為主,Flash最高為8MB。
自動駕駛和SOA架構下,MCU行業正發生巨變,或許是一個機會窗口,RISC-V的出現降低了硬件門檻,難點在于生態系統門檻很高,寄托收購或外部廠家支持都不現實,中國MCU要強大,關鍵是要培養自己的生態系統。
審核編輯 :李倩
-
SOA
+關注
關注
1文章
325瀏覽量
29229 -
生態系統
+關注
關注
0文章
711瀏覽量
21581 -
自動駕駛
+關注
關注
793文章
14882瀏覽量
179858
原文標題:自動駕駛與SOA架構下MCU的變化兼論國產MCU
文章出處:【微信號:zuosiqiche,微信公眾號:佐思汽車研究】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
如何構建適合自動駕駛的世界模型?

Transformer如何讓自動駕駛大模型獲得思考能力?
德州儀器這些技術推動自動駕駛邁向新高度
如何設計好自動駕駛ODD?
純視覺自動駕駛的優勢和劣勢有哪些?


低速自動駕駛與乘用車自動駕駛在技術要求上有何不同?

卡車、礦車的自動駕駛和乘用車的自動駕駛在技術要求上有何不同?

自動駕駛安全基石:ODD
新能源車軟件單元測試深度解析:自動駕駛系統視角

AI將如何改變自動駕駛?
自動駕駛行業常提的高階智駕是個啥?




 工商網監
工商網監
評論