 用于自動駕駛汽車的LiDAR傳感器
用于自動駕駛汽車的LiDAR傳感器

幾年后,你可能會召喚一輛自動駕駛汽車來接你并開車送你去上班。當您在旅途中處理電子郵件或小睡時,您相信汽車的傳感器和攝像頭會安全準確地將其引導至您的目的地。
為了有效,自動駕駛汽車的能力必須超過人類駕駛員的能力。這怎么可能?這些車輛如何在光明、黑暗、惡劣的天氣條件下,以及進一步突破極限,在黑暗和惡劣的天氣中看到?建立可靠的自動駕駛能力需要設計一個結合了各種傳感器和計算的檢測系統……一個比人類更能“看到”車輛環境的系統。
該系統設計多樣性的關鍵在于不同的傳感器類型、冗余和重疊傳感器,以提高汽車的視覺精度。主要的自動駕駛車輛傳感器是攝像頭、雷達和 LiDAR(光成像、檢測和測距)(圖 1)。通過技術融合電子技術,這些不同的傳感器協同工作,通過檢測視野中物體的形狀、速度和距離,為汽車提供視覺周圍地圖。單個傳感器的技術融合大于每個單個傳感器的總和。
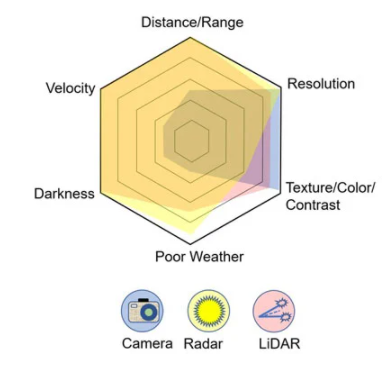
圖 1. 自動駕駛汽車需要多組“眼睛”,由攝像頭、雷達和 LiDAR 傳感器提供。
在圖 1 中,攝像頭(藍色)通過“看到”所有顏色來給人類乘員一種自信的感覺。輸入攝像頭數據通過提供無與倫比的視覺細節添加到自動駕駛汽車的地圖中。雷達信號在惡劣天氣下有效運行,增加了人類可能無法提供的維度。LiDAR 使用短脈沖和“外觀”的光并計算反射時間。將所有三個數據輸出結果與板載處理器相結合。
相機會說謊嗎?
相機創造了世界的視覺表現。自動駕駛汽車依賴于前后左右的攝像頭,因此可以實現 360 度全景。一些相機具有較寬的視野(120 度),適用于較短的范圍。其他人則專注于狹窄的視野,提供遠距離的視覺效果。有些汽車配備魚眼攝像頭,可提供全景視圖,從而全面了解車輛后方的情況。
盡管相機可以提供準確的視覺效果,但它們也有其局限性。它們區分周圍環境的細節;但是,距離確定需要二維才能開始計算準確位置。我想每輛車都可以有兩個攝像頭,就像兩只眼睛專注于人類感興趣的項目,但這可能是多余且無效的,因為我們將為自動駕駛汽車的技術融合處理添加其他傳感器。另一個關鍵的缺點是,基于攝像頭的傳感器難以檢測低能見度條件下的物體,如雨中、霧中或夜間。
雷達測繪
雷達傳感器補充了低能見度相機。雷達從一開始就用于飛機、氣象編隊和探測船只。該技術以脈沖形式傳輸無線電波。一旦波擊中物體,它們就會反彈并返回接收器。這提供了速度和位置對象數據。
雷達傳感器也在汽車周圍,從各個角度檢測物體。雖然這種傳感器技術可以確定速度和距離,但它無法區分不同的車輛類型。雷達和攝像頭傳感器共同提供的數據足以實現較低級別的自主性,但它們并不能涵蓋所有情況,也不能滿足人類的經驗。這就是我們需要激光雷達的原因。
使用 LiDAR 傳感器聚焦
LiDAR 是執行自動車輛距離感測的關鍵光學技術。激光雷達傳感器有助于完成圖片。用于汽車應用的 LiDAR 性能高度依賴于光學前端以及信號如何通過信號鏈傳輸然后進行處理。
LiDAR 傳感器通過脈沖激光和計算返回信號的時間來測量距離。LiDAR 為自動駕駛汽車提供 3D 視圖。返回的信號為周圍的汽車和行人提供形狀和深度。與雷達一樣,激光雷達在弱光條件下工作。
為什么跨阻放大器對 LiDAR 至關重要
在 LiDAR 應用中,跨阻放大器 (TIA)具有獨特的帶寬和噪聲規格,是信號鏈的核心,可以準確檢測固定或移動物體。一個有效的 TIA 必須具有足夠寬的帶寬來捕捉不同道路條件下的所有細節,并且噪聲盡可能低以避免接收到的信號失真。
Maxim 具有跨阻放大器 (TIA1),當與雪崩光電二極管配合使用時,可感應返回光。信號通過比較器 (COMP1) 進一步調節。如圖 2中的示意圖所示,該圖描繪了車輛的激光/接收器系統,TIA2 和 COMP2 提供了初始激光傳輸時間。該系統由多個光電二極管、一個激光二極管和支持電子設備組成,用于傳輸和接收光信號。
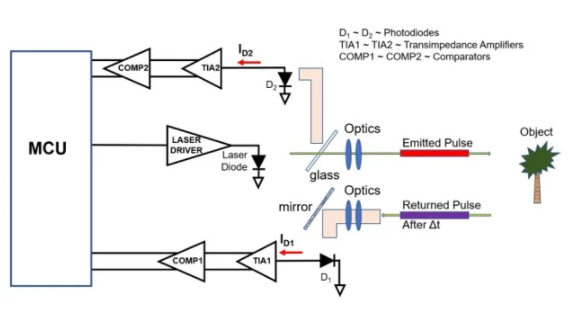
圖 2. 帶有 TIA 和 COMP 光接收器系統的 LiDAR 系統。
在圖 2 中,激光驅動器向物體發起激光脈沖傳輸。激光傳播到玻璃板,玻璃板將激光信號反射回 MCU 以確定初始傳輸時間并通過發射器光學器件(指定的透鏡)。發射的脈沖到達物體并反射到 D 1,TIA1 接收器系統。一旦通過接收器光學器件和鏡面反射,光就會撞擊到 InGaAs 光電二極管 (D 1 ),這是一種具有 1310nm 到 1550nm 光靈敏度帶寬的高靈敏度半導體電子器件。
D 1上的光線可能很亮,也可能很暗,具體取決于行進的距離。此外,大氣中可能存在污染物,并且為了混淆系統,可能存在干擾幻象燈。D PIN2將光轉換為安培電流 (I D1 ),該電流在跨阻放大器 #2 (TIA1) 上傳播。
TIA(MAX40660或MAX40661)和 COMP(MAX40025或MAX40026)是 LiDAR 信號接收器電路的組成部分。MAX40660 和 MAX40661 是用于 LiDAR 應用中的光學測距接收器的 TIA。
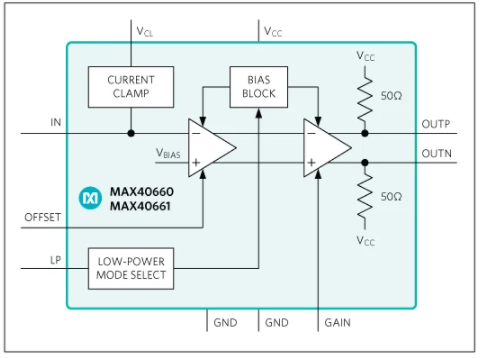
圖 3. 用于汽車 LiDAR 的 MAX40660/MAX40661 跨阻放大器(TIA1 和 TIA2)。
低噪聲、高增益、低群延遲和從過載中快速恢復使這些 TIA 適用于距離測量應用。重要特性包括 2.38pA 輸入參考噪聲密度、內部輸入鉗位、引腳可選的 25kΩ 和 50kΩ 跨阻,MAX40660 具有 0.5pF 輸入電容和 25kΩ 跨阻的 490MHz 寬帶寬,以及 10pF 輸入電容 MAX40661 的 160MHz 帶寬。
MAX40025和MAX40026是穩定TIA光信號的比較器(COMP)。這些器件是高速比較器,典型傳播延遲為 280ps。
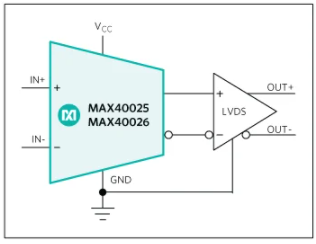
圖 4. 用于汽車 LiDAR 的 MAX40025/MAX40026 高速比較器(COMP1 和 COMP2)。
MAX40025 封裝采用 1.218mm x 0.818mm、6 凸點晶圓級封裝 (WLP),而 MAX40026 采用 2mm x 2mm 8 引腳 TDFN 側面可濕性封裝,符合 AEC-Q100 汽車認證要求。
概括
攝像頭、雷達和激光雷達系統的技術融合為自動駕駛汽車創造了一個接近人類的視覺系統。盡管這三個傳感器提供不同的數據和信息,但自動駕駛汽車的計算能力將這三個視角融合在一起。本文特別關注光學前端操作,展示了 LiDAR 如何成為三人組中的強者。突出顯示的 LiDAR 就緒 TIA 和比較器提供了前所未有的系統精度水平。有了這種準確性,人們應該對自動駕駛汽車的能力更有信心,這可能很快會讓你的通勤變得更有效率或更輕松。
審核編輯:郭婷
-
比較器
+關注
關注
14文章
1928瀏覽量
111907 -
激光雷達
+關注
關注
979文章
4470瀏覽量
196517 -
自動駕駛
+關注
關注
793文章
14881瀏覽量
179803
發布評論請先 登錄
自動駕駛汽車如何實現自動駕駛

如何設計自動駕駛傳感器失效檢測與容錯策略?
自動駕駛汽車如何檢測石頭這樣的小障礙物?

汽車自動駕駛的太陽光模擬應用研究

LiDAR線圈如何驅動無人駕駛技術
自動駕駛汽車中傳感器用得越多就越好嗎?

超聲波傳感器線圈:自動駕駛實現精確實時近距離感知的關鍵
激光雷達傳感器在自動駕駛中的作用
如何確保自動駕駛汽車感知的準確性?

太陽光模擬器 | 在汽車自動駕駛開發中的應用
康謀分享 | 基于多傳感器數據的自動駕駛仿真確定性驗證

自動駕駛汽車如何正確進行道路識別?

自動駕駛汽車是如何準確定位的?

NVIDIA Halos自動駕駛汽車安全系統發布
激光雷達技術:自動駕駛的應用與發展趨勢




 工商網監
工商網監
評論