") 移動機器人激光雷達感應(yīng)模塊的模擬前端設(shè)計
移動機器人激光雷達感應(yīng)模塊的模擬前端設(shè)計

電子發(fā)燒友網(wǎng)報道(文/李寧遠(yuǎn))僅設(shè)計的角度來看,我們可以將移動機器人分為CPU板和感應(yīng)模塊兩大設(shè)計類別。雷達、激光雷達或超聲波接近應(yīng)用的感應(yīng)模塊等等都在移動機器人上有著廣泛的應(yīng)用。移動機器人感應(yīng)模塊通常需要有如下幾個特點,一是需要具有集成或分立數(shù)字轉(zhuǎn)換器的高速信號鏈,二是需要具備快速功率脈沖能力,這主要是針對一些需要主動照明的傳感器,三則是感應(yīng)模塊與計算模塊之間能夠?qū)崿F(xiàn)高速低延遲通信。
以移動機器人中最主流的激光雷達為例,在其感應(yīng)模塊的設(shè)計上,一般分為模擬前端、數(shù)字處理、非隔離DC/DC電源、有線接口、自我診斷/監(jiān)測以及信號輸入/輸出保護這幾個部分。這里我們主要關(guān)注模擬前端設(shè)計,看看在移動機器人激光雷達感應(yīng)模塊里如何設(shè)計一個性能優(yōu)異的模擬前端。
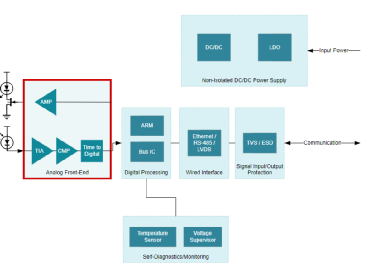
(移動機器人系統(tǒng)設(shè)計,TI)
激光雷達感應(yīng)模塊中放大器如何選擇?
激光雷達感應(yīng)模塊首選的放大器肯定是高速運算放大器(GBW>=50MHz)這一類。對于高速運算放大器,我們考慮的肯定其帶寬、噪聲、精度。當(dāng)然小尺寸以及合適的電壓也是必需的。在基于TDC的激光雷達系統(tǒng)中,可以使用雙極輸入的寬帶低噪聲運算放大器配置為跨阻放大器(TIA),增益帶寬積(GBWP)能夠以高達幾十千歐的跨阻增益實現(xiàn)高閉環(huán)帶寬。這種系統(tǒng)需要高速運放有較低的噪聲,小于2.5nV/Hz的噪聲內(nèi)是很有必要的。更為常見的應(yīng)該是基于ADC的ToF激光雷達系統(tǒng),系統(tǒng)采用高速模數(shù)轉(zhuǎn)換器將反射波形轉(zhuǎn)換為可進行處理和分析的數(shù)字信號,然后使用DSP或者FPGA處理通過ADC接收的波形信息。這類系統(tǒng)同樣需要TIA,跨阻增益的靈活配置能夠讓系統(tǒng)設(shè)計更加靈活,另外為了光電二極管和TIA之間連接更高效,可以選擇裸片選項(如果高速運算放大器可以提供裸片)來進一步縮小設(shè)計尺寸。
另外,基于ADC的系統(tǒng)使用全差分放大器來驅(qū)動高速ADC的時候,全差分放大器的增益帶寬、轉(zhuǎn)換率、噪聲、偏移漂移也是需要注意的。
激光雷達感應(yīng)模塊中數(shù)據(jù)轉(zhuǎn)換器如何選擇?
模數(shù)轉(zhuǎn)換器是很多性能優(yōu)異器件都離不開的組件,在激光雷達系統(tǒng)中,模數(shù)轉(zhuǎn)換器更是重中之重,尤其是高速模數(shù)轉(zhuǎn)換器。激光雷達感應(yīng)模塊通常會選取>10MSPS的高速ADC。基于高速ADC的測距應(yīng)用,能實現(xiàn)更精準(zhǔn)的識別、更寬松的采樣率以及更簡化的信號鏈。
激光雷達感應(yīng)模塊的高輸入頻率信號往往具有寬動態(tài)范圍需求并且要求苛刻。從這個方向上去選取高速ADC是肯定不會錯的。雙通道是最普遍的(也不是一定)應(yīng)該不需要過多糾結(jié),分辨率在14位也比較常見的選擇。信噪比SNR,無雜散動態(tài)范圍SFDR這種關(guān)鍵的指標(biāo)肯定是選擇時大家都會非常關(guān)注的,這直接影響到移動機器人的感知水準(zhǔn)。
支持多種分頻的靈活輸入時鐘緩沖器是對于ADC自身來說是很有用的,這樣時鐘輸入分頻器將給予系統(tǒng)時鐘架構(gòu)設(shè)計更高的靈活性。另外,如果ADC支持串行低壓差分信令LVDS,那更是錦上添花。支持串行低壓差分信令意味著可以大大減少接口線路的數(shù)量,實現(xiàn)更高的系統(tǒng)集成度。功耗肯定是不能遺漏的一點,在ADC性能差不多的情況下,更低功耗的器件更受青睞,以目前在移動機器人激光雷達模塊中較為常見的14位ADC為例,每個通道的功耗(最大采樣速率125MSPS時)最低現(xiàn)在可以做到110mW左右,比這稍微高一些的功耗都是很不錯的。
激光雷達感應(yīng)模塊中溫度傳感如何選擇?
這里涉及模擬溫度傳感和數(shù)字溫度傳感。模擬溫度傳感要盡可能實現(xiàn)與溫度成比例的高線性輸出電壓或電流,與此同時還要盡可能減少自發(fā)熱。精度上的要求自是不必多說,肯定是越高越好,最好能夠不需要補償電路或校準(zhǔn)不然使用起來還是有些麻煩。在室溫下,整個傳感IC能提供<±3℃的精度是最好的,在整個工作溫度范圍的精度可以稍稍一些,一般來說移動機器人也不太會有在極端溫度下工作的場景。自發(fā)熱是限制得越低越好,目前領(lǐng)先的模擬溫度傳感IC能控制在0.2℃。
數(shù)字溫度傳感可以通過編程以幾種不同分辨率中的任意一種報告溫度從而優(yōu)化傳感器轉(zhuǎn)換時間和靈敏度,這個優(yōu)勢可以利用起來。如果是在通電后很快需要溫度數(shù)據(jù),可以選擇測量時間快的數(shù)字溫度傳感,快到十幾毫秒內(nèi)就能讀取溫度。而且數(shù)字溫度傳感經(jīng)過優(yōu)化可以感知非常小的溫度變化,如何選擇就看具體需求了。
小結(jié)
這里選取了一些常見的用于配置移動機器人激光雷達感應(yīng)模塊的器件,在器件的選擇上給出了一些方向和考慮角度。具體的設(shè)計過程還是要針對整個系統(tǒng)做全局的考量,不管器件如何選型,高速信號鏈以及高速低延遲通信一直都是最為重要的。
原文標(biāo)題:機器人激光雷達模塊中器件如何選擇?
文章出處:【微信公眾號:電子發(fā)燒友網(wǎng)】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
審核編輯:湯梓紅
-
模塊
+關(guān)注
關(guān)注
7文章
2837瀏覽量
53303 -
機器人
+關(guān)注
關(guān)注
213文章
31096瀏覽量
222361 -
激光雷達
+關(guān)注
關(guān)注
980文章
4473瀏覽量
196576
原文標(biāo)題:機器人激光雷達模塊中器件如何選擇?
文章出處:【微信號:elecfans,微信公眾號:電子發(fā)燒友網(wǎng)】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄

禾賽科技2025年割草機器人3D激光雷達出貨量第一
Infineon移動機器人電機控制方案深度解析
Infineon DEMO_IMR_BMSCTRL_V1:助力移動機器人電池管理的創(chuàng)新方案
SPAD+VCSEL+LDD+MPD,海思推出高精度激光雷達方案
移動機器人“芯”引擎爆發(fā),禾賽、海思新品逆襲

移動機器人技術(shù)的發(fā)展歷程
恩智浦自主移動機器人設(shè)計要點

德州儀器加速激光雷達在機器人中的應(yīng)用

AGV/AMR機器人單線激光雷達選型指南




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論