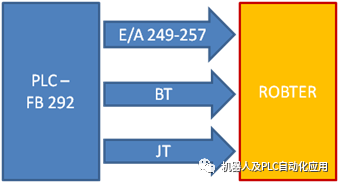
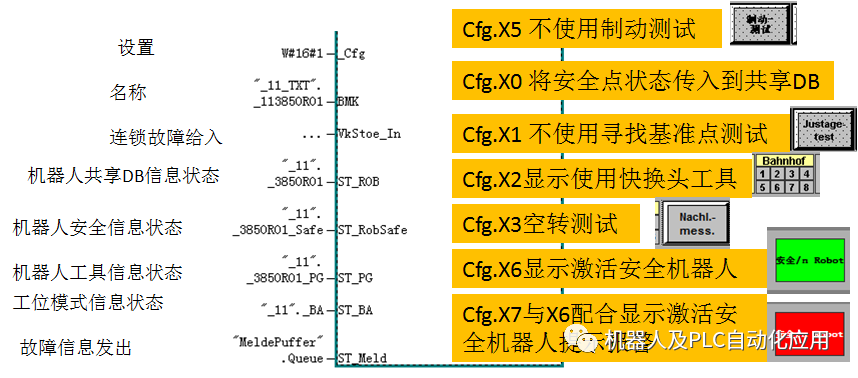
 VASS 05安全機器人PLC控制FB292
VASS 05安全機器人PLC控制FB292


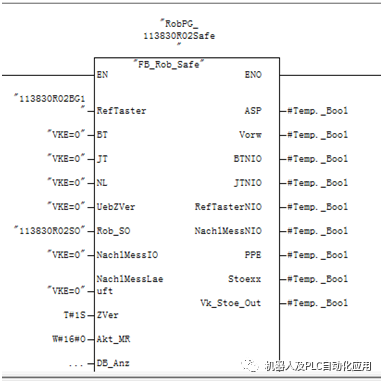

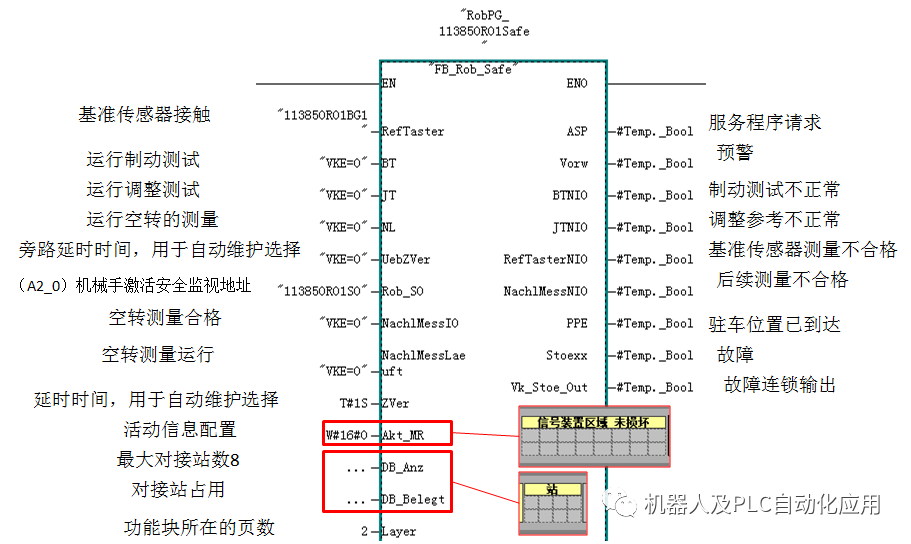
RefTaster : BOOL 基準傳感器 SafeRangeMonitoring
BT : BOOL 運行制動測試
JT : BOOL 運行調整測試
UebZVer : BOOL 旁路延時時間,用于自動維護選擇
ZVer : TIME 延時時間,用于自動維護選擇
畫面參數轉移
GlobAnwProz := DB_ARG.GlobAnwProz;
(*檢查頁面是否正確(在機器人1-8頁之間)
IF Layer < 1 OR Layer > 8 THEN
xLayerNIO := True;
ELSE
xLayerNIO := False;
iLayerIntern := Layer + 1;
END_IF;
xLayerAktiv := ((GlobAnwProz[0].B1 =INT_TO_BYTE(Layer)) AND NOT xLayerNIO) OR (GlobAnwProz[0].B1 = Byte#255); 頁面激活
(* HMI-WINCC按鈕控制)

xS_NachlMess := (bVisuTasten = BYTE#5); 空轉測試
xS_AwBT := (bVisuTasten = BYTE#6);抱閘測試
xS_AwJT := (bVisuTasten = BYTE#7);基準點測試
xS_Wartung := (bVisuTasten = BYTE#8);去維修位置
xBT := BYTE_TO_BOOL(ST_ROB.A249_256_EnergyMM);A249剎車測試
xJT := BYTE_TO_BOOL(SHR(IN:=ST_ROB.A249_256_EnergyMM,N:=1));A250調整測試反饋
xASP :=BYTE_TO_BOOL(SHR(IN:=ST_ROB.A249_256_EnergyMM,N:=2)); A251請求服務程序
xVVB := BYTE_TO_BOOL(SHR(IN:=ST_ROB.A249_256_EnergyMM,N:=3));A252警告剎車磨損
xFBT := BYTE_TO_BOOL(SHR(IN:=ST_ROB.A249_256_EnergyMM,N:=4)); A253剎車測試n.i.O.
xFJT := BYTE_TO_BOOL(SHR(IN:=ST_ROB.A249_256_EnergyMM,N:=5));A254調整參考n.i.O.
xPPE:= BYTE_TO_BOOL(SHR(IN:=ST_ROB.A249_256_EnergyMM,N:=6));A255到達停車位置
xSM:= BYTE_TO_BOOL(SHR(IN:=ST_ROB.A249_256_EnergyMM,N:=7));A256總故障
運行制動測試或調整測試
在每個工作順序和維護順序的開始時,機器人會查詢制動測試選擇、調整測試選擇和服務程序請求等信號。如果有某個選擇信號或請求信號,則執行相應的函數。函數運行結束時,選擇或請求信號將立即被復位,接著執行該順序。
選擇制動測試或調整測試
如果機器人處于順序 125 中的零位且沒有其它后續任務,則選擇制動測試或調整測試時將在設置的延時時間 'ZVer' 過后自動地為機器人選擇維護。一旦完成制動測試或調整測試,立即重新對維護位置進行自動確認。如果機器人需要無任何延時地執行所選函數,則必須采用“維護” 按鈕選擇維護,或者,讓'UebZVer' 塊為TRUE。一旦完成制動測試或調整測試,立即對維護位置進行自動確認。
--------------------------------END-----------------------
審核編輯 :李倩
-
機器人
+關注
關注
213文章
31092瀏覽量
222350 -
plc
+關注
關注
5051文章
14602瀏覽量
487049
原文標題:VASS 05 安全機器人PLC控制FB292
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
高精度機器人控制的核心——基于 MYD-LT536 開發板的精密運動控制方案
RK3576機器人核心:三屏異顯+八路攝像頭,重塑機器人交互與感知
揭秘工業 4.0 機器人:感知、安全和控制技術

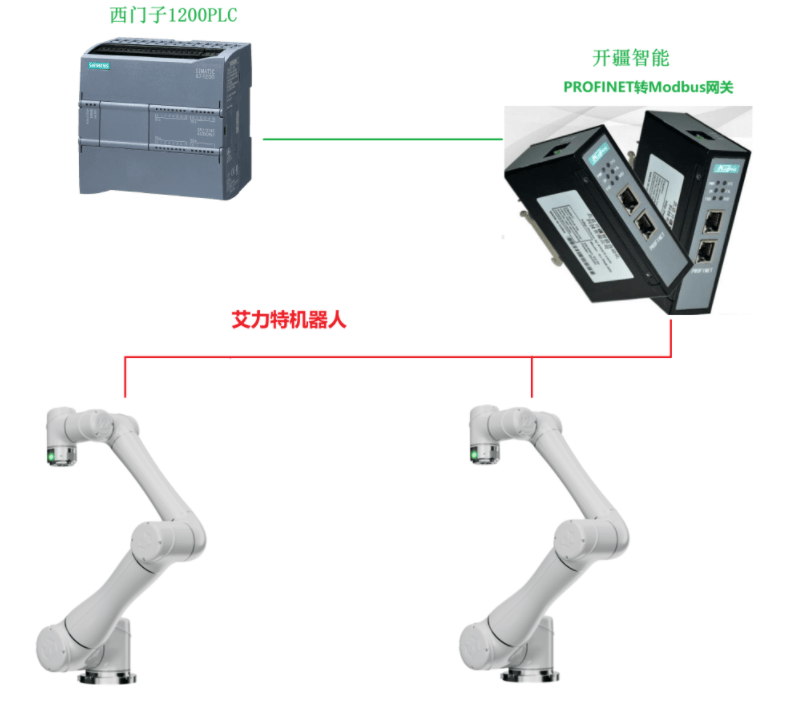
開疆智能Profinet轉ModbusTCP網關連接艾力特機器人配置案例
ADI安全產品如何簡化不同機器人控制系統中安全機制的實現

ADI解讀機器人控制系統中的安全風險和有效安全措施 為機器人技術的未來發展筑牢安全防線


工業機器人的特點
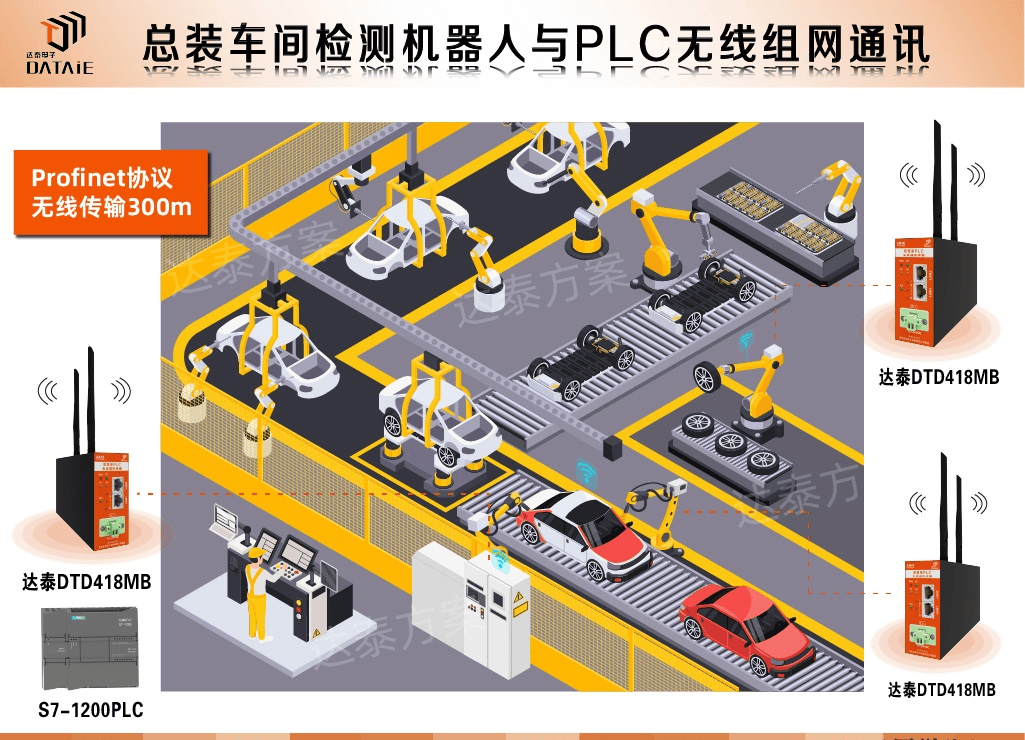
汽車制造車間檢測機器人與PLC無線以太網實時控制方案
盤點#機器人開發平臺
詳細介紹機場智能指路機器人的工作原理
【「# ROS 2智能機器人開發實踐」閱讀體驗】機器人入門的引路書
【「# ROS 2智能機器人開發實踐」閱讀體驗】+內容初識
雅特力科技助力宇樹科技推動智慧機器人創新應用:深入布局機器人電機控制核心

發那科機器人A型控制柜急停板安全回路接線方法



 工商網監
工商網監
評論