") PyTorch顯存機制分析
PyTorch顯存機制分析

作者最近兩年在研究分布式并行,經(jīng)常使用PyTorch框架。一開始用的時候?qū)τ赑yTorch的顯存機制也是一知半解,連蒙帶猜的,經(jīng)常來知乎上來找答案,那么我就吸收大家的看法,為PyTorch的顯存機制做個小的總結(jié)吧。
01 理論知識1.1 深度學(xué)習(xí)訓(xùn)練過程
開門見山的說,PyTorch在進行深度學(xué)習(xí)訓(xùn)練的時候,有4大部分的顯存開銷,分別是模型參數(shù)(parameters),模型參數(shù)的梯度(gradients),優(yōu)化器狀態(tài)(optimizer states)以及中間激活值(intermediate activations) 或者叫中間結(jié)果(intermediate results)。為了后面顯存分析闡述的方便,我將深度學(xué)習(xí)的訓(xùn)練定義4個步驟:- 模型定義:定義了模型的網(wǎng)絡(luò)結(jié)構(gòu),產(chǎn)生模型參數(shù);
- 前向傳播:執(zhí)行模型的前向傳播,產(chǎn)生中間激活值;
- 后向傳播:執(zhí)行模型的后向傳播,產(chǎn)生梯度;
- 梯度更新:執(zhí)行模型參數(shù)的更新,第一次執(zhí)行的時候產(chǎn)生優(yōu)化器狀態(tài)。
1.2 前向傳播
拿Linear層(或者叫Dense層,前饋神經(jīng)網(wǎng)絡(luò),全連接層等等...)舉例:假設(shè)他的權(quán)重矩陣為W,偏置向量為b,那么他的前向計算過程就是:,這里的X為該層的輸入向量,Y為輸出向量(中間激活值)1.3 后向傳播(反向傳播)
參考了這篇文章《神經(jīng)網(wǎng)絡(luò)反向傳播的數(shù)學(xué)原理》https://zhuanlan.zhihu.com/p/22473137后向傳播回來了一個第l+1層的輸出誤差矩陣,用以計算該層的梯度和輸入誤差1.4 梯度更新
接下來就是利用 W_diff 和 b_diff 進行更新了: 當(dāng)然使用 Adam 優(yōu)化器的時候,實際的更新過程并沒有上面的這么簡單。目前用的最多的是 AdamW ,可以看看這篇文章《當(dāng)前訓(xùn)練神經(jīng)網(wǎng)絡(luò)最快的方式:AdamW優(yōu)化算法+超級收斂》https://zhuanlan.zhihu.com/p/38945390)但是使用這一類優(yōu)化器,也會帶來額外的顯存開銷。對于每一個參數(shù),Adam都會為它準(zhǔn)備對應(yīng)的2個優(yōu)化器狀態(tài),分別是動量(momentum)和方差(variance),用以加速模型的訓(xùn)練。02 顯存分析方法與Torch機制2.1 分析方法
(1) No Nvidia-smi我看很多人現(xiàn)在還在用 nvidia-smi 來看 pytorch 的顯存占用,盯著跳來跳去的torch緩存區(qū)分析真的不累嗎。(貼一個Torch為什么不用Nvidia-smi看的圖)。而且PyTorch是有緩存區(qū)的設(shè)置的,意思就是一個Tensor就算被釋放了,進程也不會把空閑出來的顯存還給GPU,而是等待下一個Tensor來填入這一片被釋放的空間。有什么好處?進程不需要重新向GPU申請顯存了,運行速度會快很多,有什么壞處?他不能準(zhǔn)確地給出某一個時間點具體的Tensor占用的顯存,而是顯示的已經(jīng)分配到的顯存和顯存緩沖區(qū)之和。這也是令很多人在使用PyTorch時對顯存占用感到困惑的罪魁禍?zhǔn)住?/span>(2) torch.cuda is all you need在分析PyTorch的顯存時候,一定要使用torch.cuda里的顯存分析函數(shù),我用的最多的是torch.cuda.memory_allocated()和torch.cuda.max_memory_allocated(),前者可以精準(zhǔn)地反饋當(dāng)前進程中Torch.Tensor所占用的GPU顯存,后者則可以告訴我們到調(diào)用函數(shù)為止所達到的最大的顯存占用字節(jié)數(shù)。還有像torch.cuda.memory_reserved()這樣的函數(shù)則是查看當(dāng)前進程所分配的顯存緩沖區(qū)是多少的。memory_allocated+memory_reserved就等于nvidia-smi中的值啦。非~常~好~用chao dasheng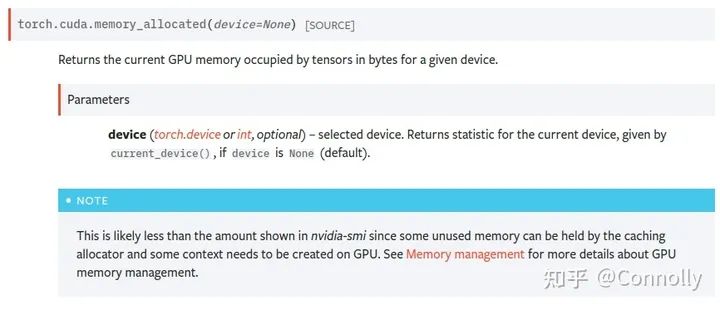 Torch 官方文檔2.2 PyTorch context開銷-----之前沒有提到PyTorch context的開銷,做個補充...我注意到有很多同學(xué)在做顯存分析的時候是為了在訓(xùn)練的時候可以把卡的顯存用滿,這個之前沒有考慮到呢。其實PyTorch context是我們在使用torch的時候的一個大頭開銷。主要參考的是論壇里的這篇討論:How do I create Torch Tensor without any wasted storage space/baggage?https://discuss.pytorch.org/t/how-do-i-create-torch-tensor-without-any-wasted-storage-space-baggage/131134什么是PyTorch context? 其實官方給他的稱呼是CUDA context,就是在第一次執(zhí)行CUDA操作,也就是使用GPU的時候所需要創(chuàng)建的維護設(shè)備間工作的一些相關(guān)信息。如下圖所示這個值跟CUDA的版本,pytorch的版本以及所使用的設(shè)備都是有關(guān)系的。目前我在ubuntu的torch1.9上測過RTX 3090和V100的context 開銷。其中3090用的CUDA 11.4,開銷為1639MB;V100用的CUDA 10.2,開銷為1351MB。感興趣的同學(xué)可以在shell中執(zhí)行下面這兩行代碼,然后用nvidia-smi去看看自己的環(huán)境里context的大小。然后用總大小減去context的大小再做顯存分析。
Torch 官方文檔2.2 PyTorch context開銷-----之前沒有提到PyTorch context的開銷,做個補充...我注意到有很多同學(xué)在做顯存分析的時候是為了在訓(xùn)練的時候可以把卡的顯存用滿,這個之前沒有考慮到呢。其實PyTorch context是我們在使用torch的時候的一個大頭開銷。主要參考的是論壇里的這篇討論:How do I create Torch Tensor without any wasted storage space/baggage?https://discuss.pytorch.org/t/how-do-i-create-torch-tensor-without-any-wasted-storage-space-baggage/131134什么是PyTorch context? 其實官方給他的稱呼是CUDA context,就是在第一次執(zhí)行CUDA操作,也就是使用GPU的時候所需要創(chuàng)建的維護設(shè)備間工作的一些相關(guān)信息。如下圖所示這個值跟CUDA的版本,pytorch的版本以及所使用的設(shè)備都是有關(guān)系的。目前我在ubuntu的torch1.9上測過RTX 3090和V100的context 開銷。其中3090用的CUDA 11.4,開銷為1639MB;V100用的CUDA 10.2,開銷為1351MB。感興趣的同學(xué)可以在shell中執(zhí)行下面這兩行代碼,然后用nvidia-smi去看看自己的環(huán)境里context的大小。然后用總大小減去context的大小再做顯存分析。importtorch temp=torch.tensor([1.0]).cuda()我估計會有人問怎么去減小這個開銷...官方也給了一個辦法,看看自己有哪些cuda依賴是不需要的,比如cuDNN,然后自己重新編譯一遍PyTorch。編譯的時候把對應(yīng)的包的flag給設(shè)為false就好了。我是還沒有試過,要搭編譯的環(huán)境太難受了,而且還要經(jīng)常和庫做更新。
2.3Torch顯存分配機制
在PyTorch中,顯存是按頁為單位進行分配的,這可能是CUDA設(shè)備的限制。就算我們只想申請4字節(jié)的顯存,CUDA也會為我們分配512字節(jié)或者1024字節(jié)的空間。2.4Torch顯存釋放機制
在PyTorch中,只要一個Tensor對象在后續(xù)不會再被使用,那么PyTorch就會自動回收該Tensor所占用的顯存,并以緩沖區(qū)的形式繼續(xù)占用顯存。要是實在看緩沖區(qū)不爽的話,也可以用torch.cuda.empty_cache()把它歸零,但是程序速度會變慢哦03 訓(xùn)練過程顯存分析為了讓大家方便理解,我這里用torch.nn.Linear(1024, 1024, bias=False) 來做例子。為了省事,loss函數(shù)則直接對輸出的樣本進行求和得到。沒辦法,想直接執(zhí)行l(wèi)oss.backward()的話,loss得是標(biāo)量才行呢。示例代碼:import torch model = torch.nn.Linear(1024,1024, bias=False).cuda() optimizer = torch.optim.AdamW(model.parameters()) inputs = torch.tensor([1.0]*1024).cuda() # shape = (1024) outputs = model(inputs) # shape = (1024) loss = sum(outputs) # shape = (1) loss.backward() optimizer.step()
3.1 模型的定義
結(jié)論:顯存占用量約為參數(shù)量乘以4import torch model = torch.nn.Linear(1024,1024, bias=False).cuda() print(torch.cuda.memory_allocated())打印出來的數(shù)值為4194304,剛好等于1024×1024×4。
3.2 前向傳播過程
結(jié)論:顯存增加等于每一層模型產(chǎn)生的結(jié)果的顯存之和,且跟batch_size成正比。inputs = torch.tensor([1.0]*1024).cuda() # shape = (1024) memory + 4096 outputs = model(inputs) # memory + 4096代碼中,outputs為產(chǎn)生的中間激活值,同時它也恰好是該模型的輸出結(jié)果。在執(zhí)行完這一步之后,顯存增加了4096字節(jié)。(不算inputs的顯存的話)。
3.3 后向傳播過程
后向傳播會將模型的中間激活值給消耗并釋放掉掉,并為每一個模型中的參數(shù)計算其對應(yīng)的梯度。在第一次執(zhí)行的時候,會為模型參數(shù)分配對應(yīng)的用來存儲梯度的空間。loss = sum(outputs) # memory + 512(torch cuda分配最小單位) temp = torch.cuda.memory_allocated() loss.backward() print(torch.cuda.memory_allocated() - temp) # 第一次增加4194304第一次執(zhí)行時顯存增加:4194304字節(jié) - 激活值大小;第二次以后執(zhí)行顯存減少:激活值大小;Note:由于這個中間激活值被賦給了outputs,所以后面在后向傳播的時候會發(fā)現(xiàn),這個outputs的顯存沒有被釋放掉。但是當(dāng)層數(shù)變深的時候,就能明顯看到變化了。為了讓大家看到變化,再寫一段代碼~
import torch # 模型初始化 linear1 = torch.nn.Linear(1024,1024, bias=False).cuda() # + 4194304 print(torch.cuda.memory_allocated()) linear2 = torch.nn.Linear(1024, 1, bias=False).cuda() # + 4096 print(torch.cuda.memory_allocated()) # 輸入定義 inputs = torch.tensor([[1.0]*1024]*1024).cuda() # shape = (1024,1024) # + 4194304 print(torch.cuda.memory_allocated()) # 前向傳播 loss = sum(linear2(linear1(inputs))) # shape = (1) # memory + 4194304 + 512 print(torch.cuda.memory_allocated()) # 后向傳播 loss.backward() # memory - 4194304 + 4194304 + 4096 print(torch.cuda.memory_allocated()) # 再來一次~ loss = sum(linear2(linear1(inputs))) # shape = (1) # memory + 4194304 (512沒了,因為loss的ref還在) print(torch.cuda.memory_allocated()) loss.backward() # memory - 4194304 print(torch.cuda.memory_allocated())
3.4 參數(shù)更新
optimizer.step()#第一次增加8388608,第二次就不增不減了哦第一次執(zhí)行時,會為每一個參數(shù)初始化其優(yōu)化器狀態(tài),對于這里的AdamW而言,每一個參數(shù)需要4*2=8個字節(jié)。第二次開始,不會再額外分配顯存。顯存開銷:第一次: 增加8388608字節(jié)第二次及以后: 無增減3.5 Note由于計算機計算的特性,有一些計算操作在計算過程中是會帶來額外的顯存開銷的。但是這種開銷在torch.memory_allocated中是不能被察覺的。比如在AdamW在進行某一層的更新的時候,會帶來2倍該層參數(shù)量大小的臨時額外開銷。這個在max_memory_allocated中可以看到。在本例中就是8388608字節(jié)。
審核編輯 :李倩
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
-
神經(jīng)網(wǎng)絡(luò)
+關(guān)注
關(guān)注
42文章
4838瀏覽量
107753 -
顯存
+關(guān)注
關(guān)注
0文章
112瀏覽量
14094 -
pytorch
+關(guān)注
關(guān)注
2文章
813瀏覽量
14850
原文標(biāo)題:綜述:PyTorch顯存機制分析
文章出處:【微信號:vision263com,微信公眾號:新機器視覺】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
熱點推薦
淺談錫膏在手機制造上的作用
錫膏在手機制造中扮演著“隱形橋梁”與“工藝基石”的雙重角色,其作用貫穿電路板焊接、元件可靠性保障、生產(chǎn)效率提升及質(zhì)量管控等核心環(huán)節(jié),是確保手機性能穩(wěn)定、壽命持久的關(guān)鍵材料。以下從功能實現(xiàn)、工藝價值及行業(yè)趨勢三個維度展開分析:
Pytorch 與 Visionfive2 兼容嗎?
Pytorch 與 Visionfive2 兼容嗎?
$ pip3 install torch torchvision torchaudio --index-url https
發(fā)表于 02-06 08:28
顯存讀寫沖突造成花屏解決方案
方案1、分配兩個獨立顯存區(qū)——A和B,顯示A區(qū)時寫B(tài)區(qū)準(zhǔn)備,完成B區(qū)準(zhǔn)備后,設(shè)定控制器顯示B區(qū),交替循環(huán)更新
方案2、客戶MCU 的TFT控制器資源是否有類似的 “TE”信號可以監(jiān)測,根據(jù)“TE
發(fā)表于 12-29 09:07
大顯存突破!解鎖120B MoE大模型,英特爾酷睿Ultra 285H拓展AI新應(yīng)用
一段時間,但是我們給它帶來了全新的能力,通過軟件和配置的升級,讓它們做到以前做不到的新的應(yīng)用場景。 這次重磅官宣的核心亮點在于,大顯存跑贏大模型。酷睿Ultra9 285H高達128GB系統(tǒng)統(tǒng)一內(nèi)存,其中超過120GB可作為可變共享顯存,助力包括輕薄本、mini PC、

借助NVIDIA Megatron-Core大模型訓(xùn)練框架提高顯存使用效率
隨著模型規(guī)模邁入百億、千億甚至萬億參數(shù)級別,如何在有限顯存中“塞下”訓(xùn)練任務(wù),對研發(fā)和運維團隊都是巨大挑戰(zhàn)。NVIDIA Megatron-Core 作為流行的大模型訓(xùn)練框架,提供了靈活高效的并行化
如何利用Trace機制實現(xiàn)LLCP預(yù)覽功能
在藍牙協(xié)議棧開發(fā)過程中,有時需要預(yù)先知道 LLCP。本文將介紹如何利用 Trace 機制實現(xiàn) LLCP 預(yù)覽功能。
如何看懂GPU架構(gòu)?一分鐘帶你了解GPU參數(shù)指標(biāo)
分析GPU核心參數(shù)體系:算力、顯存大小、顯存帶寬、熱門架構(gòu)特性等關(guān)鍵指標(biāo),旨在幫您理解不同應(yīng)用場景下,如何選擇最合適的GPU算力解決方案。1、算力GPU執(zhí)行浮點運算

教程來啦!LuatOS中的消息通信機制詳解及其應(yīng)用場景
在資源受限的嵌入式環(huán)境中,LuatOS采用消息機制實現(xiàn)模塊間解耦與高效通信。通過預(yù)定義消息名稱(如“new_msg”),開發(fā)者可輕松構(gòu)建響應(yīng)式程序結(jié)構(gòu)。接下來我們將深入剖析其實現(xiàn)原理與典型使用方法
Arm方案 基于Arm架構(gòu)的邊緣側(cè)設(shè)備(樹莓派或 NVIDIA Jetson Nano)上部署PyTorch模型
本文將為你展示如何在樹莓派或 NVIDIA Jetson Nano 等基于 Arm 架構(gòu)的邊緣側(cè)設(shè)備上部署 PyTorch 模型。
電容瞬態(tài)放電原理:大電流的產(chǎn)生機制
在《基于柔性探頭的電容放電瞬態(tài)電流分析》一文中,我們深入探討了測量電容放電瞬態(tài)電流的過程,但是電容是如何產(chǎn)生大電流的?接下來將著重介紹其中大電流的產(chǎn)生機制。電容儲能的物理本質(zhì)決定能量釋放潛力電容器

大模型推理顯存和計算量估計方法研究
隨著人工智能技術(shù)的飛速發(fā)展,深度學(xué)習(xí)大模型在各個領(lǐng)域得到了廣泛應(yīng)用。然而,大模型的推理過程對顯存和計算資源的需求較高,給實際應(yīng)用帶來了挑戰(zhàn)。為了解決這一問題,本文將探討大模型推理顯存和計算量的估計
發(fā)表于 07-03 19:43
摩爾線程發(fā)布Torch-MUSA v2.0.0版本 支持原生FP8和PyTorch 2.5.0
近日,摩爾線程正式發(fā)布Torch-MUSA v2.0.0版本,這是其面向PyTorch深度學(xué)習(xí)框架的MUSA擴展庫的重要升級。新版本基于MUSA Compute Capability 3.1計算架構(gòu)
如何驗證CAN控制器的錯誤響應(yīng)機制?
CAN節(jié)點的穩(wěn)定性、可靠性和安全性得益于其強大的錯誤管理機制。上一篇文章我們介紹了CAN控制器的錯誤管理機制的工作原理。本文將基于其工作原理及ISO16845-1:2016標(biāo)準(zhǔn),為大家介紹

氮化鎵快充芯片U8608的保護機制
深圳銀聯(lián)寶氮化鎵快充芯片U8608具有多重故障保護機制,通過集成多維度安全防護,防止設(shè)備出現(xiàn)過充電、過放電、過電流等問題?,在電子設(shè)備中構(gòu)建起全方位的安全屏障,今天具體分析一下!



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論