") 分辨率提升20倍!Aeva推出全球首款“相機級分辨率”激光雷達(dá)
分辨率提升20倍!Aeva推出全球首款“相機級分辨率”激光雷達(dá)

電子發(fā)燒友網(wǎng)報道(文/梁浩斌)在激光雷達(dá)的技術(shù)路線上,目前已經(jīng)量產(chǎn)上車的產(chǎn)品中,基本上都是基于MEMS微振鏡/棱鏡掃描/轉(zhuǎn)鏡的路線實現(xiàn)的。實際上,采用這些技術(shù)方案,是激光雷達(dá)能夠通過車規(guī)要求,并大規(guī)模量產(chǎn)的最快方式。當(dāng)然在未來的下一代純固態(tài)激光雷達(dá)方向上,還有多種方案,其中FMCW(調(diào)頻連續(xù)波)就是未來的激光雷達(dá)技術(shù)路線之一。
最近,F(xiàn)MCW激光雷達(dá)領(lǐng)域的代表廠商Aeva發(fā)布了全球首款具有相機級分辨率的4D激光雷達(dá)Aeries II,同時具備“汽車級可靠性”,也就是能夠用于配備自動輔助駕駛功能的車輛上。
最近,F(xiàn)MCW激光雷達(dá)領(lǐng)域的代表廠商Aeva發(fā)布了全球首款具有相機級分辨率的4D激光雷達(dá)Aeries II,同時具備“汽車級可靠性”,也就是能夠用于配備自動輔助駕駛功能的車輛上。
據(jù)介紹,Aeries II具備幾個主要特征,其中最核心的是相機級超分辨率和超遠(yuǎn)距離瞬時速度監(jiān)測。
Aeries II使用Aeva專有的原始4D數(shù)據(jù),提供實時相機級圖像,每幀多達(dá)1000行,靜態(tài)場景不會出現(xiàn)運動模糊,分辨率是傳統(tǒng)激光雷達(dá)傳感器的20倍。
之所以Aeries II被稱為4D激光雷達(dá),是因為除了測量3D位置之外,還會監(jiān)測每個掃描點的瞬時速度,這被Aeva稱為第四維。這個特性的加入,使自動駕駛車輛和機器能夠感知物體的位置,并精確知道它們在500米的距離內(nèi)移動的速度。
除了上面兩個核心特性之外,Aeries II與傳統(tǒng)的激光雷達(dá)使用的光纖激光器不同,它將所有關(guān)鍵的激光雷達(dá)元件通過硅基半導(dǎo)體工藝集成到一個緊湊的模塊中,可以實現(xiàn)可靠和可擴展的生產(chǎn)。
在生產(chǎn)方面,其實早在2020年9月,Aeva就與汽車零部件Tier1供應(yīng)商采埃孚(ZF)合作,目標(biāo)是將車規(guī)級FMCW激光雷達(dá)在2023或2024年實現(xiàn)量產(chǎn)。
但很顯然,截至目前為止,F(xiàn)MCW激光雷達(dá)還未能實現(xiàn)量產(chǎn)。相比于目前市面上主流的混合固態(tài)激光雷達(dá),F(xiàn)MCW激光雷達(dá)可以使用標(biāo)準(zhǔn)的硅基半導(dǎo)體工藝來制造,從制造的角度來看更加容易實現(xiàn)大規(guī)模量產(chǎn)。產(chǎn)能起量后,后續(xù)的生產(chǎn)成本也將會更加有優(yōu)勢。
不過具體到Aeries II將會什么時候量產(chǎn)?Aeva并沒有給出預(yù)估的日期,但按照此前該公司公開的路線圖,其第三代激光雷達(dá)芯片模塊已經(jīng)完成,是量產(chǎn)前的最終架構(gòu)。據(jù)稱,B樣在2021年完成開發(fā),2022年完成C樣的開發(fā)和測試驗證,到2023年的Q2或Q3完成D樣生產(chǎn),隨后在2023年底實現(xiàn)量產(chǎn)。
除此之外,奧迪、大眾、保時捷都有計劃在未來的車型中采用Aeva的FMCW激光雷達(dá),保時捷還是Aeva的早期股東之一。
2019年4月,奧迪在e-tron測試車隊中配備了Aeva的激光雷達(dá);大眾計劃將Aeva的激光雷達(dá)應(yīng)用于其首款量產(chǎn)的自動駕駛車型ID Buzz AV上。
相比于采用其他技術(shù)路線的激光雷達(dá),Aeva認(rèn)為FMCW能夠避免高峰值功耗對眼睛的傷害,同時,相比于直接檢測(比如Flash),F(xiàn)MCW要更加靈敏、性能更好,并且能夠抗炫光、其他光源的干擾,還能擁有速度測量的特性。
只是目前車企的選擇,并不是單一的,因為對未來的不確定,往往車企會選擇多條技術(shù)路線并行的方式。最早搭載激光雷達(dá)的奧迪A8,采用的是法雷奧與Ibeo合作開發(fā)的Scala轉(zhuǎn)鏡激光雷達(dá)。但奧迪還投資了另一家FMCW激光雷達(dá)公司Blackmore,還與Luminar合作開發(fā)自動駕駛。
展望2022年,雖然FMCW激光雷達(dá)大概率無法如期量產(chǎn),但另一個純固態(tài)激光雷達(dá)技術(shù)路線,采用Flash(泛光面陣)的激光雷達(dá)將會在今年上車。ibeo委托ZF生產(chǎn)的Flash固態(tài)激光雷達(dá)系統(tǒng)ibeoNEXT,預(yù)計會在 2022年被廣泛搭載在長城汽車旗下高端車型上。FMCW相比之下,從量產(chǎn)到上車,可能還有很長一段時間。
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
-
激光雷達(dá)
+關(guān)注
關(guān)注
979文章
4470瀏覽量
196529 -
Aeva
+關(guān)注
關(guān)注
0文章
3瀏覽量
1584
發(fā)布評論請先 登錄
相關(guān)推薦
熱點推薦
從點云到圖像級!華為新一代896線激光雷達(dá)來襲,分辨率提升4倍
架構(gòu)。解決了傳統(tǒng)激光雷達(dá)無法同時兼顧“廣角視野”和“遠(yuǎn)距離細(xì)節(jié)”的物理矛盾,分辨率較192線雷達(dá)提升4倍,為L2+、L3等輔助駕駛提供堅實的

佛瑞亞海拉與恩智浦在高分辨率雷達(dá)技術(shù)領(lǐng)域展開合作
在科技盛宴CES 2026期間,佛瑞亞海拉與恩智浦半導(dǎo)體正式官宣在高分辨率雷達(dá)技術(shù)領(lǐng)域展開合作,聚焦最新一代高分辨率雷達(dá)傳感器[ForWave7HD],共同為智能駕駛的未來描繪宏偉藍(lán)圖
淺談掃描電鏡的分辨率概念
掃描電鏡(SEM)的分辨率是指其能夠分辨樣品表面兩點之間的最小距離,是衡量其成像能力的關(guān)鍵指標(biāo)。

紅外焦平面探測器的分辨率有哪些?高分辨率有哪些優(yōu)勢?
分辨率是我們選購紅外探測器時的一個關(guān)鍵參數(shù),它代表了熱成像像素點的數(shù)量。分辨率越高,像素點就越多,圖像就越清晰,觀測的距離也越遠(yuǎn)。紅外熱成像常見的分辨率有120x90、256x192、384x288

ADC分辨率與精度的區(qū)別是什么
他們的價格可能相差一倍。
所以在這里幫大家把這兩個概念理一下,以后大家就可以理直氣壯的說精度和分辨率了,而不是將精度理解為分辨率。呵呵,希望對大家有用!
分辨率計算:測量電壓范圍/
發(fā)表于 12-05 06:24
鏡頭分辨率如何匹配工業(yè)相機的分辨率
能被分辨開來的兩個物點之間的最小距離,就是鏡頭的物方分辨率。單位為μm。這只是單純鏡頭本身的參數(shù),只反映鏡頭的解析能力,而和工業(yè)相機多少像素?zé)o關(guān)!它直接反映了,一個理想物點經(jīng)過鏡頭成像后,會模糊

提高電能質(zhì)量在線監(jiān)測裝置的暫態(tài)記錄分辨率的方法有哪些?
? 提高電能質(zhì)量在線監(jiān)測裝置暫態(tài)記錄分辨率,核心是從 硬件升級、算法優(yōu)化、數(shù)據(jù)處理、校準(zhǔn)同步 四個維度突破,同時平衡 “分辨率提升” 與 “成本、功耗、穩(wěn)定性”,具體方法可落地為以下 6 類關(guān)鍵措施
電能質(zhì)量在線監(jiān)測裝置的暫態(tài)記錄分辨率如何影響故障類型識別?
暫態(tài)記錄分辨率是故障類型識別的 “細(xì)節(jié)放大鏡”—— 核心通過 采樣率、幅值分辨率、時間分辨率 決定故障波形 “特征細(xì)節(jié)的完整性”,高分辨率能

電能質(zhì)量在線監(jiān)測裝置的暫態(tài)記錄分辨率是多少?
電能質(zhì)量在線監(jiān)測裝置的暫態(tài)記錄分辨率 電能質(zhì)量在線監(jiān)測裝置的暫態(tài)記錄分辨率主要包括時間分辨率和幅值分辨率兩個維度,具體數(shù)值因設(shè)備等級和應(yīng)用場景而異。 一、時間
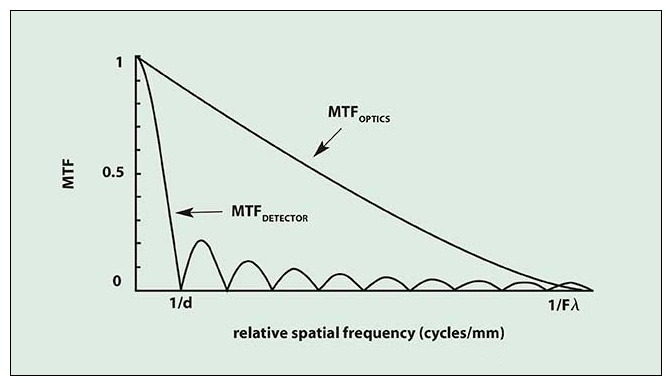
相機分辨率:融合探測器與光學(xué)性能
圖1、該系統(tǒng)的調(diào)制傳遞函數(shù)為 MTFSYS = MTFOPTICS*MTFDETECTOR。由于探測器的調(diào)制傳遞函數(shù)起著主導(dǎo)作用,所以這是一個受探測器限制的系統(tǒng)(Fλ/d = 0.1) 相機的分辨率
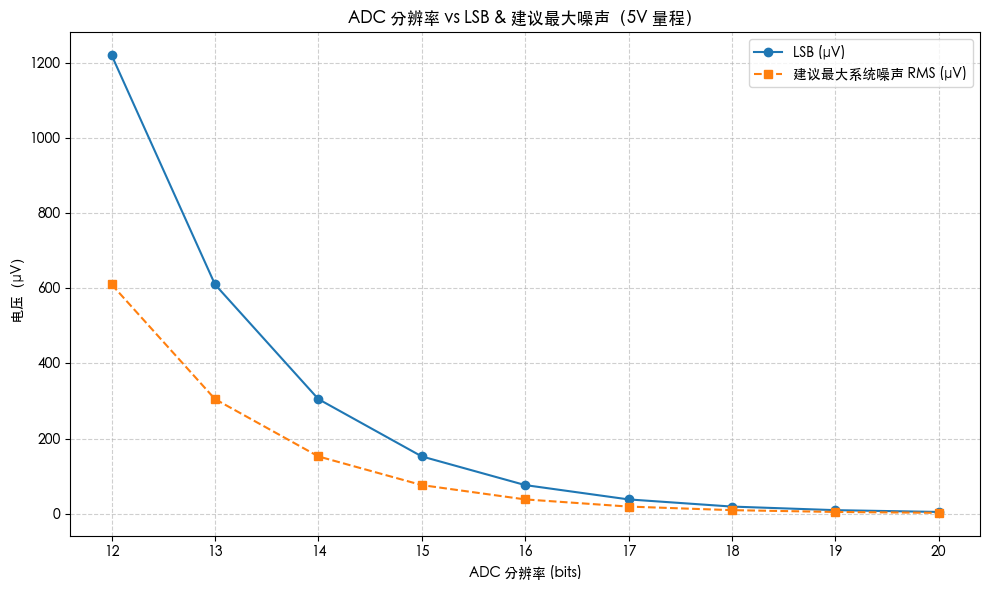
分辨率 vs 噪聲 —— ADC的挑戰(zhàn)
設(shè)計者常用高分辨率 ADC 以降低最低可量測單位(LSB),提高檢測精度。 比如一個 16 位 ADC 在 5V 范圍內(nèi), LSB ≈ 76 μV ;理想情況下可以檢測到微弱電信號。 問題是: 若
如何計算存儲示波器的垂直分辨率?
存儲示波器的垂直分辨率是指示波器能夠分辨的最小電壓變化量,它反映了示波器對信號幅度細(xì)節(jié)的測量能力,通常用位數(shù)(bit)來表示,也可通過相關(guān)公式換算為具體的電壓值。以下為你詳細(xì)介紹其計算方法:了解關(guān)鍵
發(fā)表于 05-30 14:03
CX3上的AR0245傳感器的探頭控制分辨率錯誤怎么解決?
你好。我正在開發(fā)一款使用 AR0234CS 傳感器和 CX3( CYUSB3065-BZXI )芯片的相機,并努力獲得正確的視頻流分辨率。
該傳感器能夠以 120 fps 提供 1920 x
發(fā)表于 05-12 07:02
Arm精銳超級分辨率技術(shù)助力提升游戲性能
去年夏天,Arm 推出了 Arm 精銳超級分辨率技術(shù) (Arm Accuracy Super Resolution, Arm ASR) 的早期采用計劃,這是一項從 AMD 超級分辨率銳畫技術(shù) 2
高光譜相機的空間分辨率,光譜范圍等參數(shù)我們要如何理解
高光譜相機作為一種強大的成像工具,其性能由多個關(guān)鍵參數(shù)決定,其中 空間分辨率 和 光譜范圍 尤為重要。理解這些參數(shù)的含義及其影響,對于選擇合適的高光譜相機至關(guān)重要。我們可以綜合下圖的參數(shù)來做對



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論