") 機器人主板需求配置參數(shù)的詳細介紹
機器人主板需求配置參數(shù)的詳細介紹

機器人越來越多地成為人類工作和生活的好助手。雙贊主板應(yīng)用的機器人在3C行業(yè)、食品制造和醫(yī)藥行業(yè)、陶瓷衛(wèi)浴、物流倉儲、塑膠行業(yè)等行業(yè)廣泛運用。
作為機器人的核心——主板,一直是機器人開發(fā)的重點。機器人主板,包括處理器,與處理器相連接的顯示系統(tǒng),信號處理系統(tǒng),執(zhí)行系統(tǒng),操作鍵盤,以及提供主板電能的供電系統(tǒng),所述信號處理系統(tǒng)包括用于接收外部指令和信息的無線接收模塊,用于發(fā)送信息的無線發(fā)射模塊,用于增強認別能力的紅外接收和發(fā)射模塊,對主板進行遙控的無線遙控模塊。所述機器人主板配置齊全,具備電池供應(yīng)系統(tǒng),可獨立運行,也能夠給相鄰機器人傳達信號,喚醒呼叫,從而實現(xiàn)機器人組團,可以分工完成動作和命令。那么,機器人主板需求配置參數(shù)有哪些呢?雙贊工控給大家分享一下!
型號:雙贊SZ3390
主板尺寸 :146mm×102mm
CPU :Rockchip RK3399 (28 納米 HKMG 制程) ,ARM 六核 64 位處理器,高至主頻 2.0GHz ,基于 big.LITTLE 大小核架構(gòu),雙核 Cortex-A72(大核)+四核 Cortex-A53(小核)
GPU :四核 ARM Mali-T860 ,支持 OpenGL ES 1.1/2.0/3.0/3.1,OpenVG1.1,OpenCL,Directx11,支持 AFBC(幀緩沖壓縮)
內(nèi)存 :板載 2G DDR3 雙通道高速內(nèi)存(可選 DDR3 4G)
內(nèi)置存儲 :板載 16G EMMC5.1 高速存儲(可選 MAX.64G) ,1 個 TF 卡槽,可支持 MAX.64G TF 卡
顯示屏接口 :支持 LVDS 接口(單雙路 6 位,8 位,10 位),支持分辨率大至 1080P ,支持 eDP 1.3(4 線,10.8Gbps),可選支持雙通道 MIPI-DSI ,支持 HDMI 接口,支持分辨率大至 4K×2K@60HZ ,支持雙屏同顯/異顯功能(LVDS+eDP,HDMI+eDP,HDMI+LVDS)
操作系統(tǒng) :Android 7.1(可選 Linux)
網(wǎng)絡(luò)支持 :千兆以太網(wǎng),支持 WiFi2.4G+5G/BT4.2,3G/4G 模塊接口(Mini-PCIE)
觸摸屏 :提供 I2C 接口(支持多點電容觸摸) ,USB 接口(支持多點紅外觸摸,多點電容觸摸,多點電阻觸摸,多點納米膜觸摸,多點聲波觸摸,多點光學觸摸)
視頻播放 :支持 wmv、avi、flv、rm、rmvb、mpeg 、ts、mp4 等
圖片格式 :支持 BMP、JPEG、PNG、GIF 等
USB :5 個 USB PH2.0-4P 插座,2 個 USB3.0 接口,其中 USB-OTG 支持 adb 調(diào)試
串口 :2 個 RS232(可選 TTL),2 個 TTL(可選 RS232)1 個 TTL(可選 RS485),1 個 TTL 調(diào)試口
GPIO :4 路 IO,可選輸出輸入
音頻輸出 :1 個 3.5mm 耳機插座,1 個 PH2.0-2P MIC 輸入插座 ,板載 4R/3W×2 功放(可選 4R/10W×2 功放),左右聲道輸出
特殊功能 :內(nèi)置 RTC 實時時鐘,支持定時開關(guān)機、看門狗
供電 :DC-12V 輸入
散熱:被動全鋁散熱器(可選主動帶風扇)
相對濕度 :0%-90%相對濕度,無冷凝
工作溫度 :0℃-60℃
編輯:fqj
-
機器人
+關(guān)注
關(guān)注
213文章
31079瀏覽量
222258 -
主板
+關(guān)注
關(guān)注
54文章
2361瀏覽量
76843
發(fā)布評論請先 登錄
端側(cè)智聯(lián):機器人主板架構(gòu)革新與邊緣計算的協(xié)同進化
智能AI機器人定制開發(fā)_AI陪伴對話機器人主板方案

從邊側(cè)到端側(cè): 邊緣計算與機器人主板的融合創(chuàng)新
RK3576機器人核心:三屏異顯+八路攝像頭,重塑機器人交互與感知
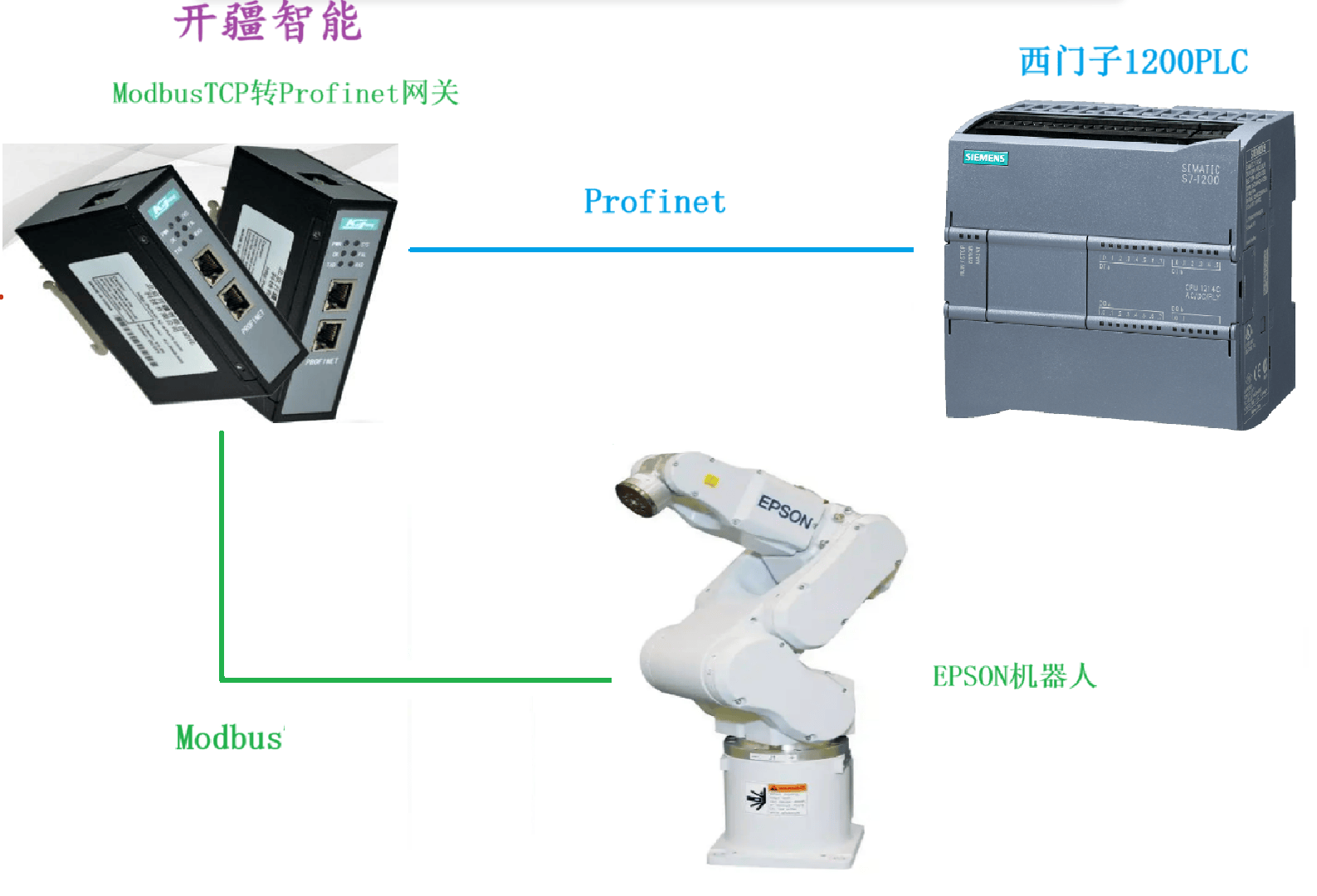
開疆智能ModbusTCP轉(zhuǎn)Profinet網(wǎng)關(guān)連接EPSON機器人配置案例
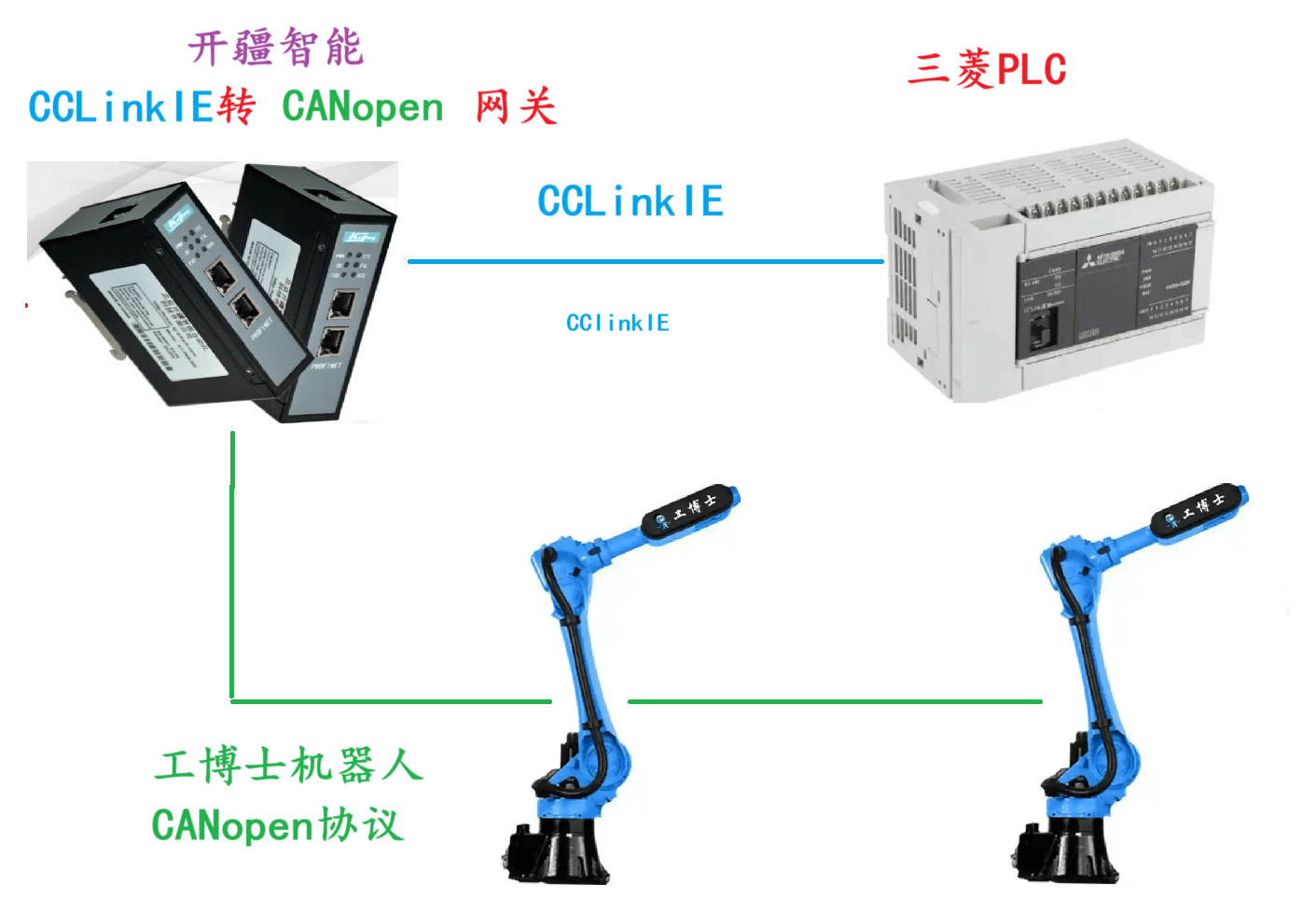
開疆智能CCLinkIE轉(zhuǎn)CANopen網(wǎng)關(guān)連接GBS20機器人配置案例
中微半導(dǎo)掃地機器人解決方案介紹

機器人主軸選型攻略:Kasite三款必備主軸實力推薦

盤點#機器人開發(fā)平臺
詳細介紹機場智能指路機器人的工作原理
【「# ROS 2智能機器人開發(fā)實踐」閱讀體驗】視覺實現(xiàn)的基礎(chǔ)算法的應(yīng)用
【「# ROS 2智能機器人開發(fā)實踐」閱讀體驗】+ROS2應(yīng)用案例
【「# ROS 2智能機器人開發(fā)實踐」閱讀體驗】+內(nèi)容初識
機器人主控芯片平臺有哪些 機器人主控芯片一文搞懂




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論