") CV基礎(chǔ)之區(qū)域生長與分水嶺算法
CV基礎(chǔ)之區(qū)域生長與分水嶺算法

區(qū)域生長是一種串行區(qū)域分割的圖像分割方法。區(qū)域生長是指從某個像素出發(fā),按照一定的準(zhǔn)則,逐步加入鄰近像素,當(dāng)滿足一定的條件時,區(qū)域生長終止。區(qū)域生長的好壞決定于1.初始點(diǎn)(種子點(diǎn))的選取。2.生長準(zhǔn)則。3.終止條件。區(qū)域生長是從某個或者某些像素點(diǎn)出發(fā),最后得到整個區(qū)域,進(jìn)而實(shí)現(xiàn)目標(biāo)的提取。
區(qū)域生長的原理
區(qū)域生長的基本思想是將具有相似性質(zhì)的像素集合起來構(gòu)成區(qū)域。具體先對每個需要分割的區(qū)域找一個種子像素作為生長起點(diǎn),然后將種子像素和周圍鄰域中與種子像素有相同或相似性質(zhì)的像素(根據(jù)某種事先確定的生長或相似準(zhǔn)則來判定)合并到種子像素所在的區(qū)域中。將這些新像素當(dāng)作新的種子繼續(xù)上面的過程,直到?jīng)]有滿足條件的像素可被包括進(jìn)來。這樣一個區(qū)域就生長成了。
區(qū)域生長實(shí)現(xiàn)的步驟如下:
1. 對圖像順序掃描!找到第1個還沒有歸屬的像素, 設(shè)該像素為(x0, y0);
2. 以(x0, y0)為中心, 考慮(x0, y0)的4鄰域像素(x, y)如果(x0, y0)滿足生長準(zhǔn)則, 將(x, y)與(x0, y0)合并(在同一區(qū)域內(nèi)), 同時將(x, y)壓入堆棧;
3. 從堆棧中取出一個像素, 把它當(dāng)作(x0, y0)返回到步驟2;
4. 當(dāng)堆棧為空時!返回到步驟1;
5. 重復(fù)步驟1 - 4直到圖像中的每個點(diǎn)都有歸屬時。生長結(jié)束。
這個過程中有幾個關(guān)鍵的問題:
a》 給定種子點(diǎn)(種子點(diǎn)如何選取?)
種子點(diǎn)的選取很多時候都采用人工交互的方法實(shí)現(xiàn),也有用其他方式的,比如尋找物體并提取物體內(nèi)部點(diǎn)作為種子點(diǎn)。
b》 確定在生長過程中能將相鄰像素包括進(jìn)來的準(zhǔn)則
灰度圖像的差值;彩色圖像的顏色等等。都是關(guān)于像素與像素間的關(guān)系描述。
c》 生長的停止條件
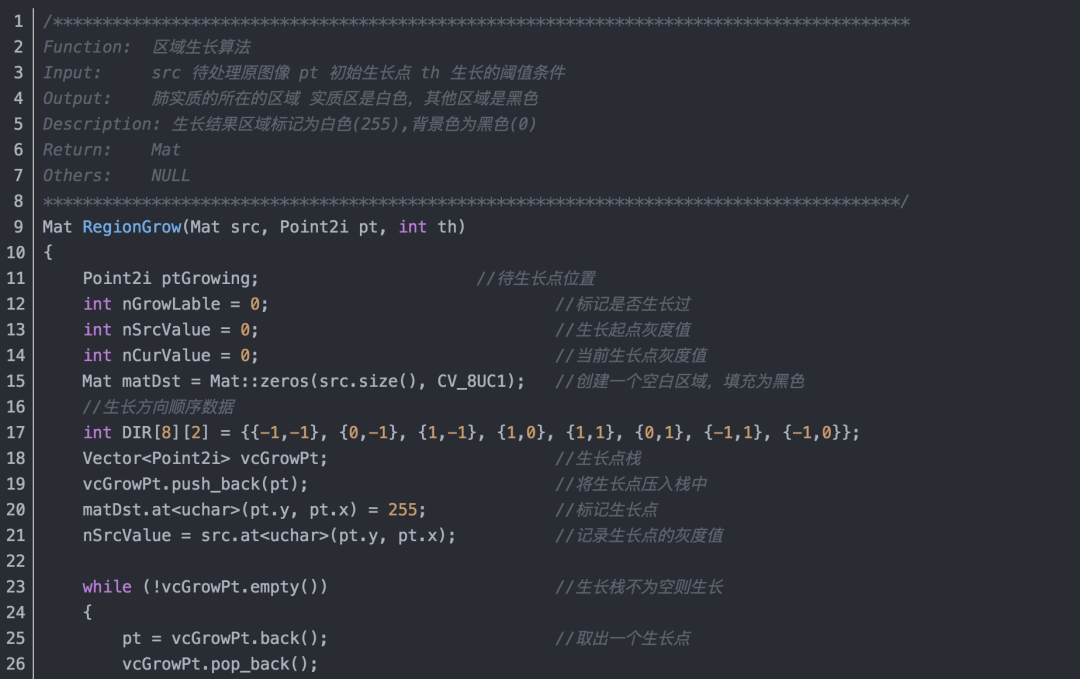
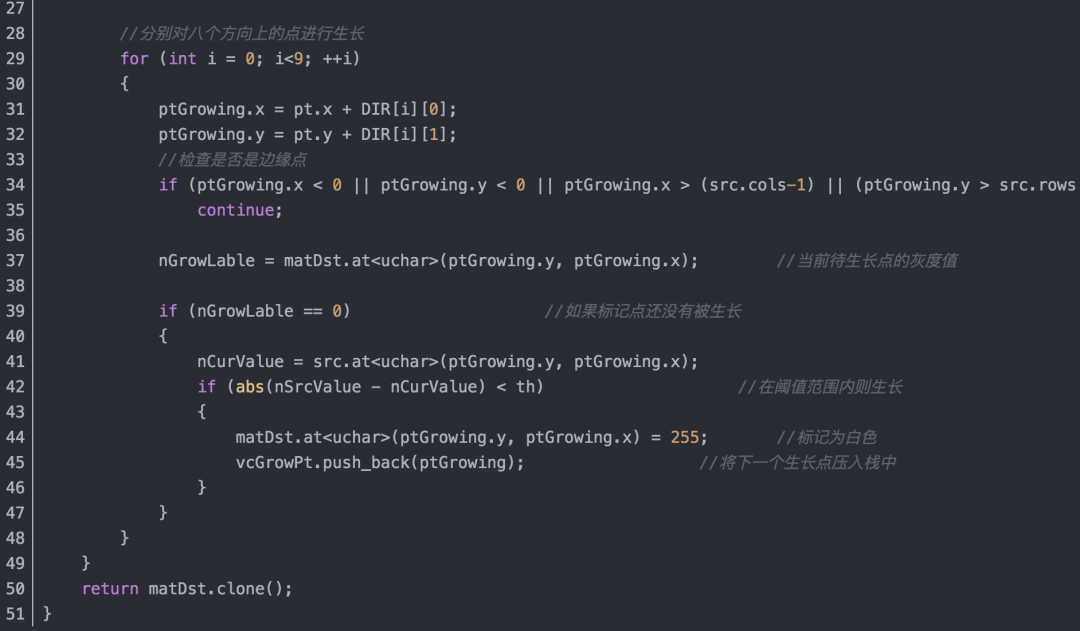
Python實(shí)現(xiàn)
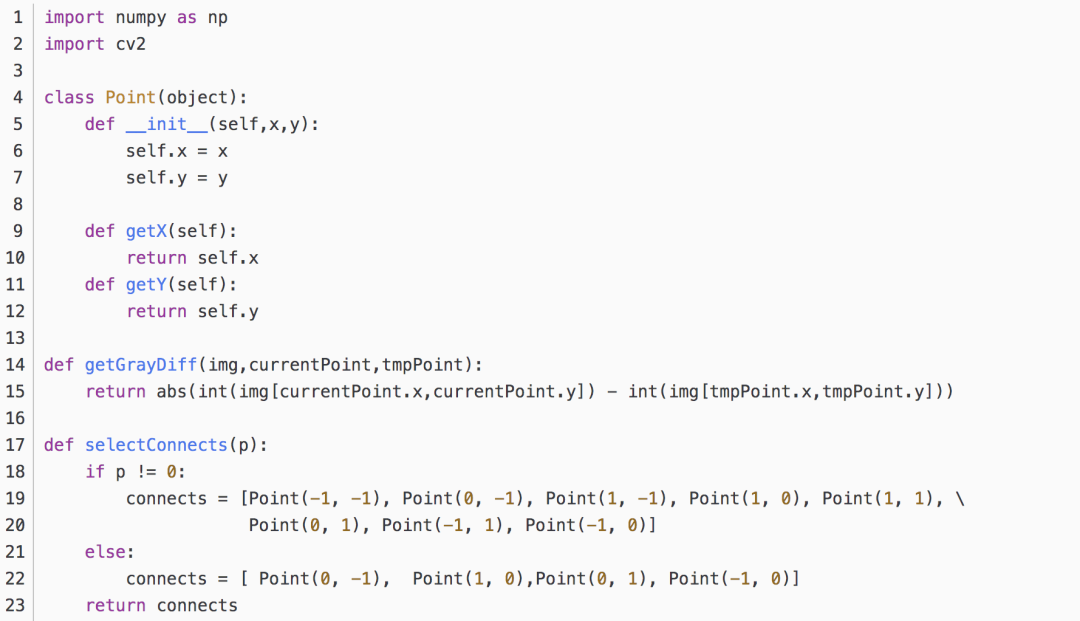
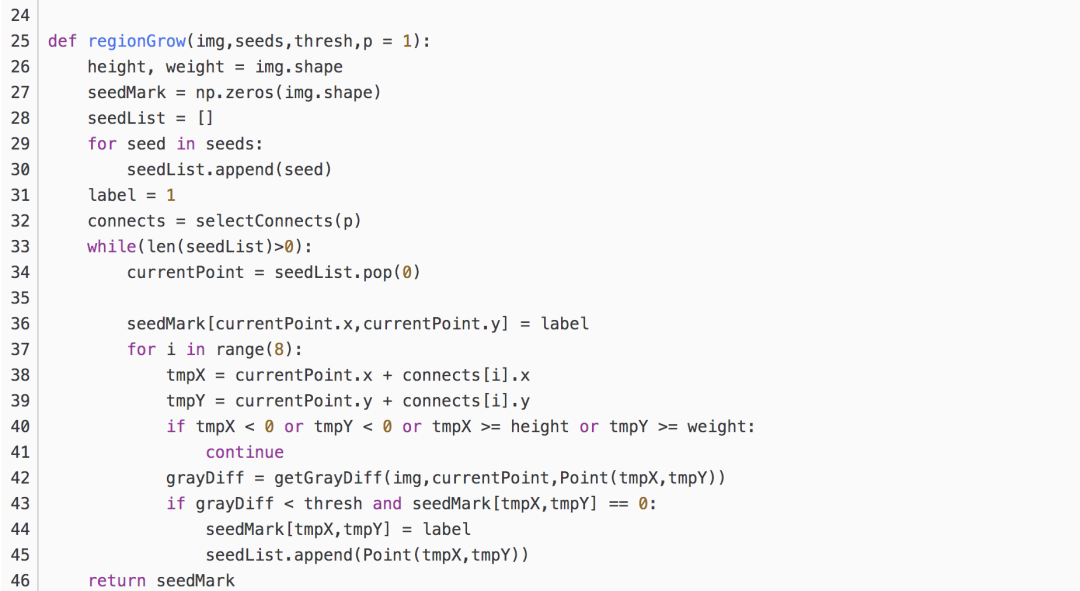

灰度差值的區(qū)域生長算法實(shí)現(xiàn)
算法實(shí)現(xiàn)的步驟:
a》 創(chuàng)建一個空白的圖像(全黑);
b》 將種子點(diǎn)存入vector中,vector中存儲待生長的種子點(diǎn);
c》 依次彈出種子點(diǎn)并判斷種子點(diǎn)如周圍8領(lǐng)域的關(guān)系(生長規(guī)則),相似的點(diǎn)則作為下次生長的種子點(diǎn);
d》 vector中不存在種子點(diǎn)后就停止生長。
貼圖看看使用該算法的圖像處理效果:
首先對原圖像進(jìn)行二值化:
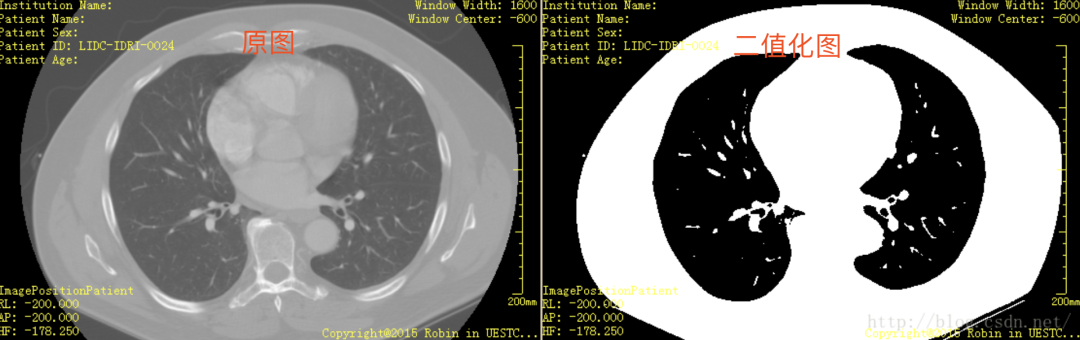
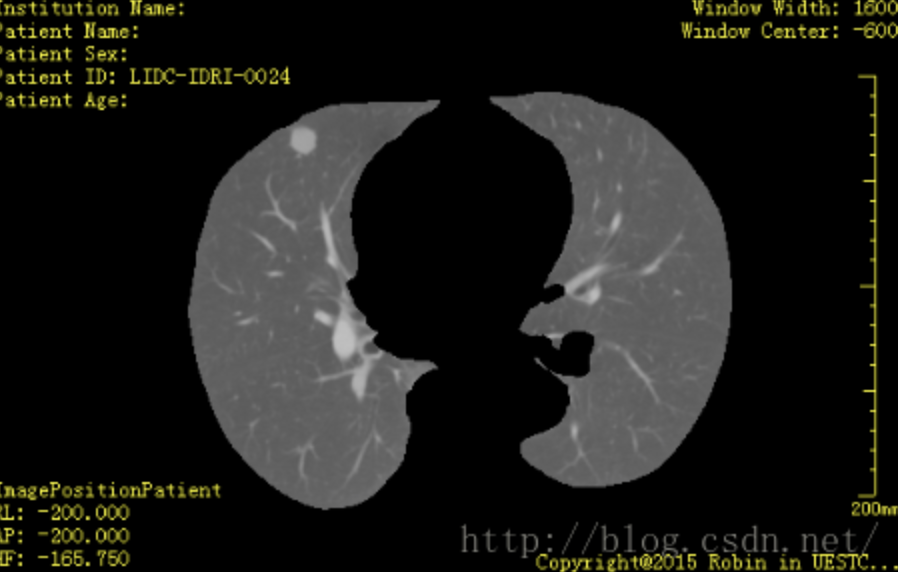
得到種子點(diǎn)的方法這里就不用介紹了,這個不是該算法的重點(diǎn)。得到兩個種子點(diǎn)(左右肺),分別使用區(qū)域生長算法得到左右肺區(qū),然后與原圖進(jìn)行與運(yùn)算,得到結(jié)果:
分水嶺算法原理
灰度圖像可以被看成拓?fù)淦矫妫叶戎蹈叩膮^(qū)域可以看出山峰,灰度值低的區(qū)域可以看成是山谷。向每一個山谷當(dāng)中灌不同顏色的水。水位升高,不同山谷的水會匯合,為防止不同山谷的水匯合,小在匯合處建立起堤壩。然后繼續(xù)灌水,然后再建立堤壩,直到山峰都掩模。構(gòu)建好的堤壩就是圖像的分割。
此方法通常會得到過渡分割的結(jié)果,因?yàn)閳D像中的噪聲以及其他因素。為了減少此影響,opencv使用基于標(biāo)記的分水嶺算法,此算法要設(shè)置哪些山谷中的匯合點(diǎn),哪些不是。這是一種交互式的圖像分割算法那。我們要給已知對象打上不同表情。如果某個區(qū)域肯定是前景或?qū)ο螅褪褂媚硞€顏色或灰度值標(biāo)簽標(biāo)記它。如果是背景那么使用其他顏色進(jìn)行標(biāo)記,其余不能確定的部分用0標(biāo)記。然后使用分水嶺算法,每次灌水,標(biāo)簽會被更新,當(dāng)兩個不同顏色的標(biāo)簽相遇就會構(gòu)建堤壩,知道所有山峰掩模,最后得到的邊界對象值是-1。
python 代碼:
對挨在一起的對象進(jìn)行分割。
要出去圖像中的白噪聲。可以使用形態(tài)學(xué)運(yùn)算,使用閉運(yùn)算去除對象中的空洞。
靠近對象中心的區(qū)域是前景,離對象遠(yuǎn)的區(qū)域是背景,不確定的區(qū)域是邊界。
首先提取硬幣區(qū)域,使用腐蝕操作去掉邊緣,剩下的就是硬幣。但硬幣沒有接觸時,此方法有效,但是由于硬幣相互接觸,就要使用另外一種有效的方法:距離變換加上合適的閾值。
之后,要尋找不確定是否是硬幣的區(qū)域。這里需要膨脹操作。膨脹操作會將對象邊界延伸到背景當(dāng)中。由于邊界區(qū)域被去除,現(xiàn)在就能知道哪些區(qū)域是前景,哪些是背景。
余下的區(qū)域不知道如何區(qū)分,那么使用分水嶺算法。這些區(qū)域通常是前景與背景的交界處。從能否確認(rèn)是否是背景的區(qū)域中減去確定是前景的區(qū)域就得到了邊界。
(前景和背景)
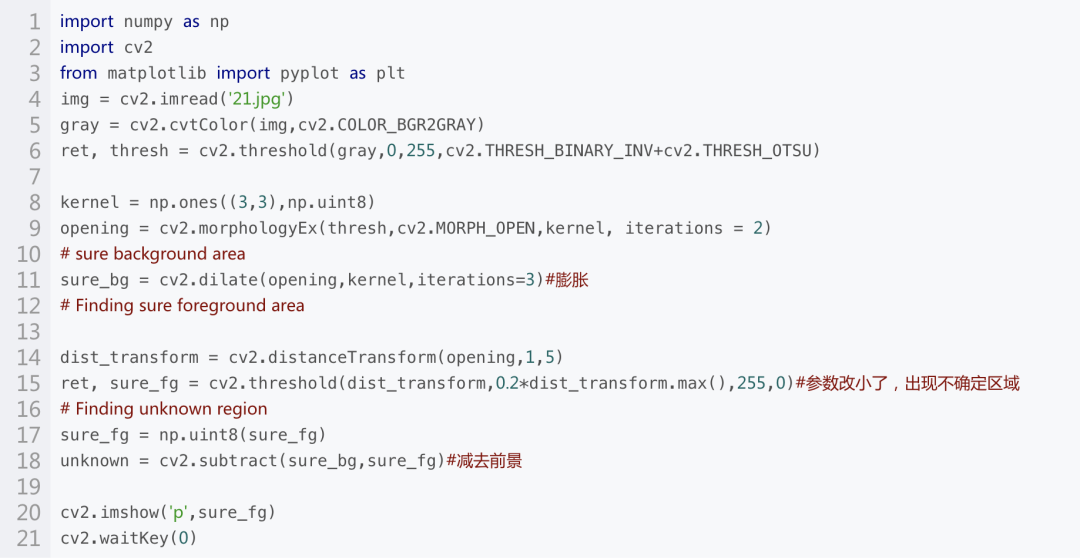
使用作者的代碼后生產(chǎn)的結(jié)果,提取到了前景,為了演示一下不確定的區(qū)域,調(diào)了一下計算前景的距離變換的參數(shù),使得中間出現(xiàn)不確定的區(qū)域)
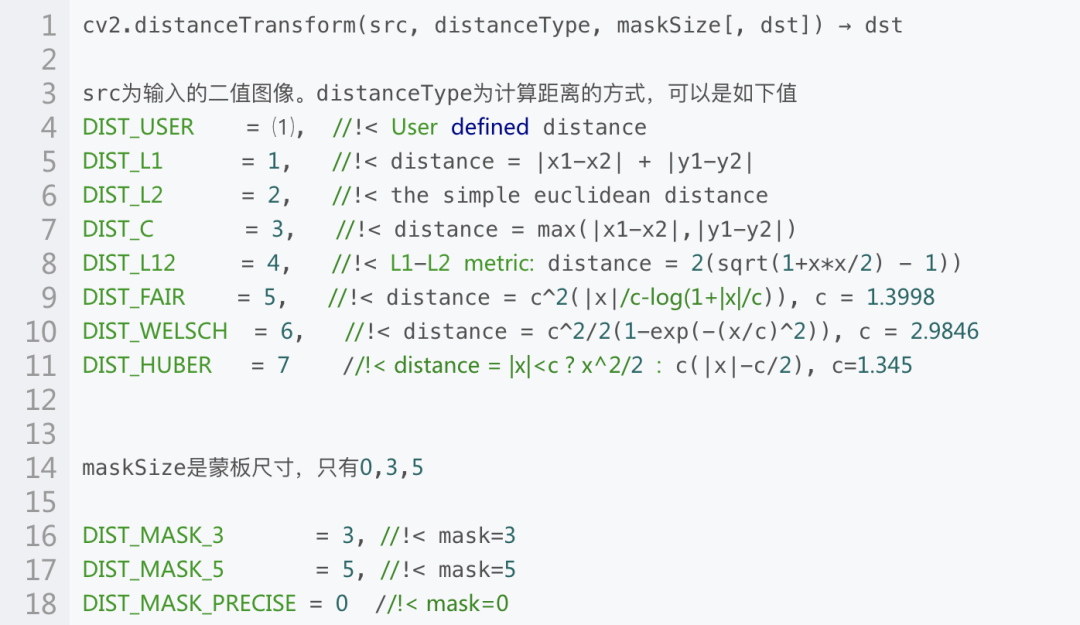
這里面使用個cv2.distanceTransform函數(shù)
該函數(shù)用于計算2值圖象中所有像素離其最近的值為0像素的近似距離。
參數(shù)為
完整代碼
現(xiàn)在知道了那些背景是硬幣,可以創(chuàng)建標(biāo)簽。(與原圖像大小相同,數(shù)據(jù)類型為int32的數(shù)組)。
對于已經(jīng)確定分類的區(qū)域,也就是背景和前景,使用整數(shù)標(biāo)記,不確定的區(qū)域是用0標(biāo)記。可以使用cv2.connectedComponents()函數(shù)來實(shí)現(xiàn)此功能。它會將背景標(biāo)記為0,其他標(biāo)記為位從1開始的正整數(shù)。
但是,如果背景標(biāo)記為0,那么分水嶺算法會將其當(dāng)成位置區(qū)域,所以使用不同的整數(shù)進(jìn)行標(biāo)記,對于不確定的區(qū)域,函數(shù)標(biāo)記為0.
結(jié)果使用JET顏色地圖表示。深藍(lán)色未知區(qū)域,硬幣區(qū)域使用不同顏色。其余部分用淺藍(lán)色。
使用分水嶺算法
效果不錯
編輯:jq
-
圖像處理
+關(guān)注
關(guān)注
29文章
1342瀏覽量
59537 -
圖像分割
+關(guān)注
關(guān)注
4文章
182瀏覽量
18776 -
python
+關(guān)注
關(guān)注
57文章
4876瀏覽量
90034
原文標(biāo)題:CV基礎(chǔ):區(qū)域生長與分水嶺算法
文章出處:【微信號:vision263com,微信公眾號:新機(jī)器視覺】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
2026 年,智能汽車正式進(jìn)入“端云協(xié)同”的分水嶺
聲智科技新一代多模態(tài)AI耳機(jī)即將全球首發(fā)
面向柔性音頻終端的時鐘選型參考——SJK 溫補(bǔ)晶振(TCXO)32.768kHz–125MHz

歐盟新規(guī)落地:充電樁整樁MID認(rèn)證時代即將開啟,行業(yè)迎來分水嶺
向高同行!地平線集結(jié)全球產(chǎn)業(yè)鏈,破解智駕規(guī)模化落地難題

福祿克CV系列紅外窗口的核心作用

AI眼鏡新品密集發(fā)布:技術(shù)分水嶺已至,產(chǎn)品力成競爭關(guān)鍵

慧榮科技SM2508助力佰維和金士頓開啟8TB PCIe 5.0時代
電路守護(hù)者的分水嶺:一文讀懂PPTC與CPTC的核心差異
虛擬電廠加速卡不是噱頭!萬點(diǎn)規(guī)模VPP的性能分水嶺
友道智途獲頒上海市新一批智能網(wǎng)聯(lián)汽車示范運(yùn)營牌照
封裝業(yè)“成本分水嶺”——瑞沃微CSP如何讓傳統(tǒng)、陶瓷封裝漸成 “前朝遺老”?
傳統(tǒng)路線與其利天下的分水嶺,無刷電鉆驅(qū)動方案對比--【其利天下】

索尼4K超高清模組FCB-CR8530:無人機(jī)航拍的“分水嶺”




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論