 關于GY-30的簡介與驅動及如何操作
關于GY-30的簡介與驅動及如何操作

基于HAL庫的BH1750驅動代碼,通訊方式為模擬IIC,非常適合在使用hal庫的stm開發版上移植
一、GY-30簡介
GY-30是一款內置ROHM-BH1750FLV芯片的數字光照強度模塊。芯片內置16bitAD轉換器,可直接數字輸出,測量光照強度范圍為0-65535lx(精度可選)。除此之外,模塊內置電平轉換,支持3-5V供電,可與5V單片機IO直接連接;對外提供IIC接口,方便使用。
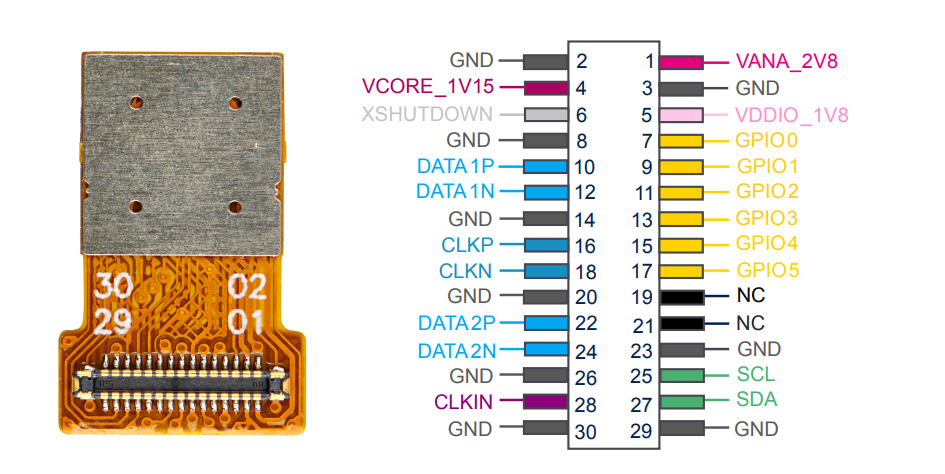
1.1GY-30原理圖
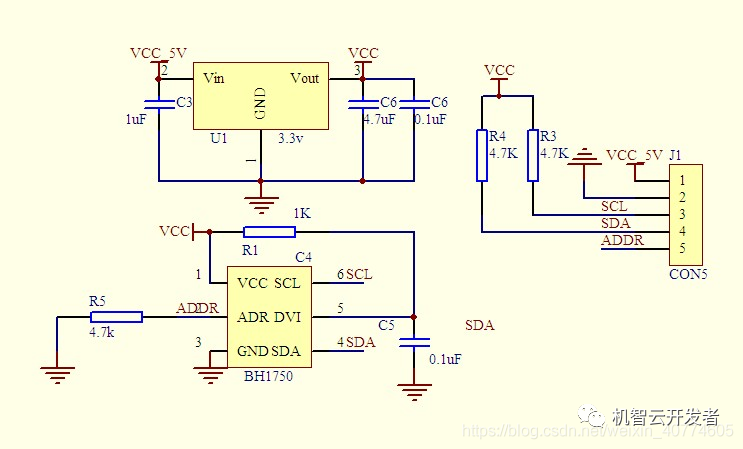
1.2模塊引腳
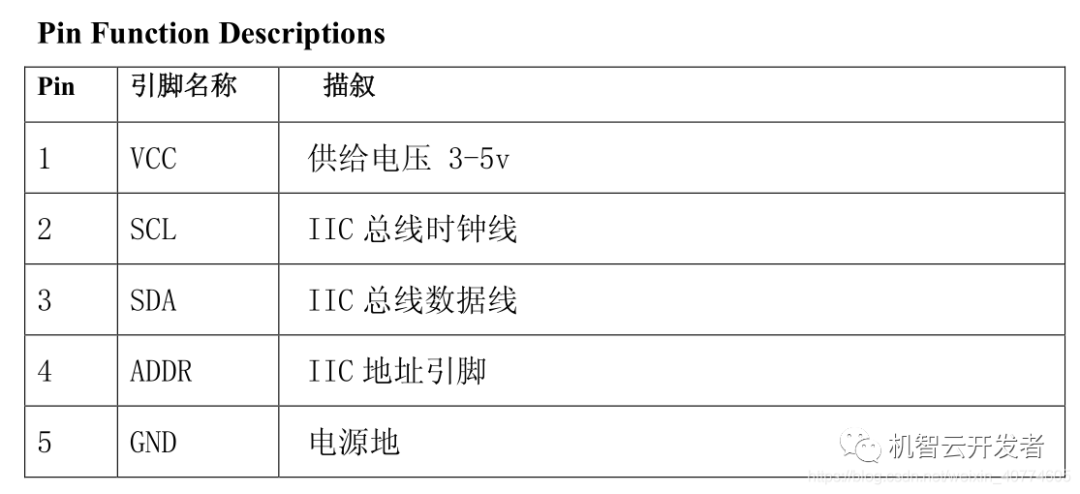
ps:ADDR默認接地,此時IIC地址為0x46
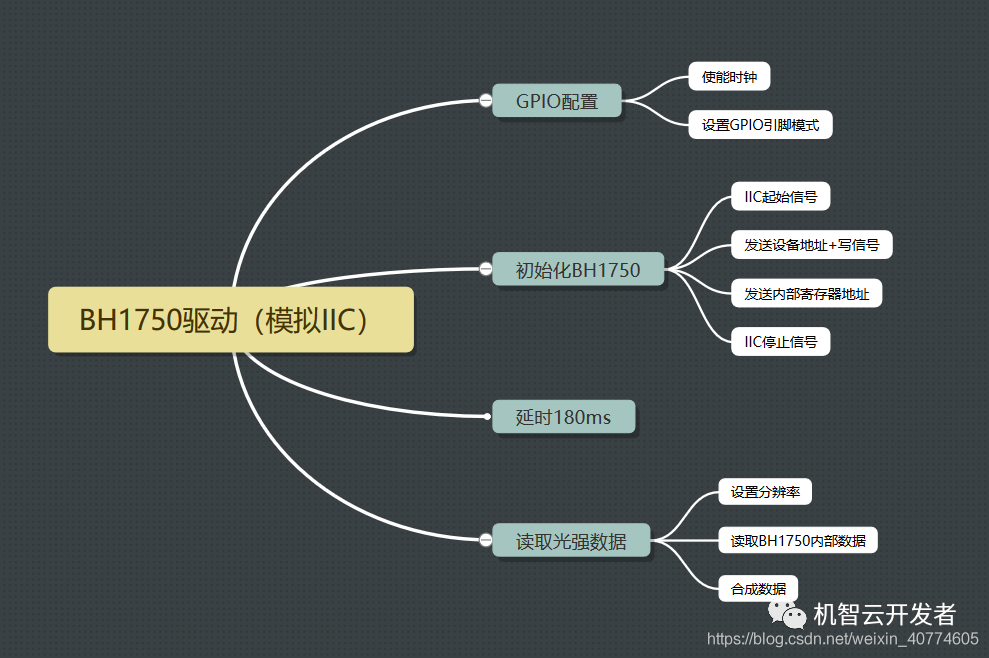
二、GY-30驅動
2.1GPIO配置
由于本人使用的是hal庫,使能時鐘
__HAL_RCC_GPIOB_CLK_ENABLE();
GPIO配置
/*Configure GPIO pin Output Level */ HAL_GPIO_WritePin(GPIOB, GPIO_PIN_0|GPIO_PIN_1, GPIO_PIN_RESET);
/*Configure GPIO pins : PB0 PB1 */ GPIO_InitStruct.Pin = GPIO_PIN_0|GPIO_PIN_1; GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP; GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW; HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
PB0 -- 模擬SDA
PB1 -- 模擬SCL
2.2初始化BH1750
IIC起始(SCL高電平時,SDA下降沿)
/***開始信號***/void BH1750_Start(){ HAL_GPIO_WritePin(GPIOB, sda,GPIO_PIN_SET); //拉高數據線 HAL_GPIO_WritePin(GPIOB, scl,GPIO_PIN_SET); //拉高時鐘線 delay_us(5); //延時 HAL_GPIO_WritePin(GPIOB, sda,GPIO_PIN_RESET); //產生下降沿 delay_us(5); //延時 HAL_GPIO_WritePin(GPIOB, scl,GPIO_PIN_RESET); //拉低時鐘線}
發送設備地址,寄存器地址
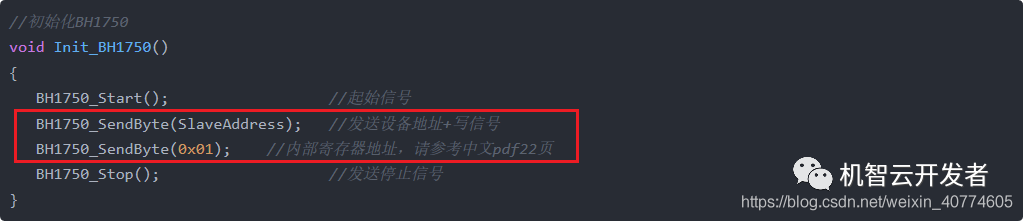
IIC結束(SCL高電平,SDA上升沿)
/*****停止信號******/void BH1750_Stop(){ HAL_GPIO_WritePin(GPIOB, sda,GPIO_PIN_RESET); //拉低數據線 HAL_GPIO_WritePin(GPIOB, scl,GPIO_PIN_SET); //拉高時鐘線 delay_us(5); //延時 HAL_GPIO_WritePin(GPIOB, sda,GPIO_PIN_SET); //產生上升沿 delay_us(5); //延時}
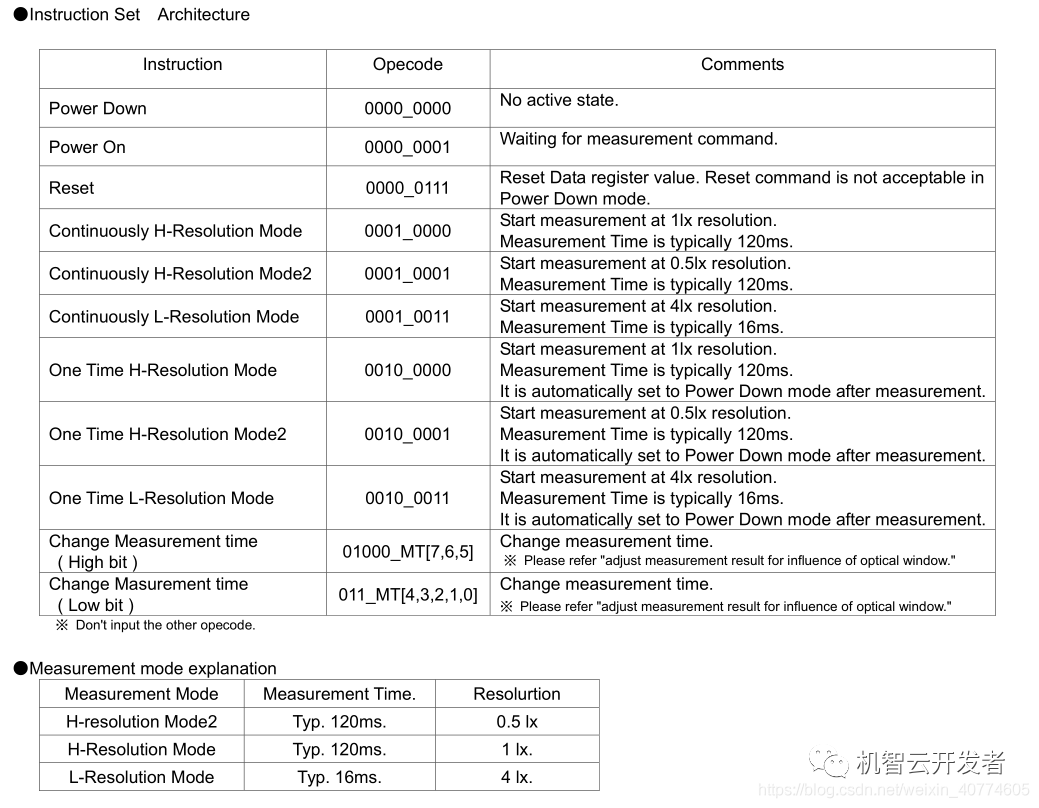
2.3設置精度
設置精度只需向BH1750發送指令,本人采用的是H- Resolution mode(0x10)
如需設置其他精度親參考下表
2.4讀取光強數據
讀取BH1750內部數據
//連續讀出BH1750內部數據void mread(void){ uchar i; BH1750_Start(); //起始信號 BH1750_SendByte(SlaveAddress+1); //發送設備地址+讀信號
for (i=0; i《3; i++) //連續讀取6個地址數據,存儲中BUF { BUF[i] = BH1750_RecvByte(); //BUF[0]存儲0x32地址中的數據 if (i == 3) { BH1750_SendACK(1); //最后一個數據需要回NOACK } else { BH1750_SendACK(0); //回應ACK } }
BH1750_Stop(); //停止信號 Delay_mms(5);}
合成數據
dis_data=BUF[0];dis_data=(dis_data《《8)+BUF[1]; //合成數據
Value_GY_30=(float)dis_data/1.2;
三、元操作
3.1延時
//系統主頻72MHZvoid delay_us(uint16_t us){ while(us--) { __nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop(); __nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop(); __nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop(); __nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop(); __nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop(); __nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop(); __nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop(); __nop();__nop(); }}
void Delay_mms(uint16_t tmp){ uint16_t i=0; while(tmp--) { i=12000; while(i--); }}
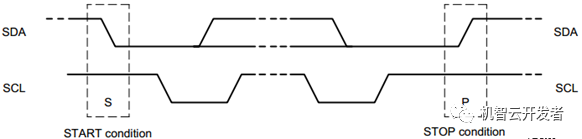
3.2IIC開始/結束信號
時序圖如下代碼見2.2初始化BH1750
3.4發送應答信號
/**************************************發送應答信號入口參數:ack (0:ACK 1:NAK)**************************************/void BH1750_SendACK(int ack){ GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.Pin = GPIO_PIN_0|GPIO_PIN_1; GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP; GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW; HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
if(ack == 1) //寫應答信號 HAL_GPIO_WritePin(GPIOB, sda,GPIO_PIN_SET); else if(ack == 0) HAL_GPIO_WritePin(GPIOB, sda,GPIO_PIN_RESET); else return;
HAL_GPIO_WritePin(GPIOB, scl,GPIO_PIN_SET); //拉高時鐘線 delay_us(5); //延時 HAL_GPIO_WritePin(GPIOB, scl,GPIO_PIN_RESET); //拉低時鐘線 delay_us(5); //延時}
3.5接收應答信號
/**************************************接收應答信號**************************************/int BH1750_RecvACK(){ GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT; /*這里一定要設成輸入上拉,否則不能讀出數據*/ GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW; GPIO_InitStruct.Pin = sda; HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
HAL_GPIO_WritePin(GPIOB, scl,GPIO_PIN_SET); //拉高時鐘線 delay_us(5); //延時
if(HAL_GPIO_ReadPin( GPIOB, sda ) == 1 )//讀應答信號 mcy = 1 ; else mcy = 0 ;
HAL_GPIO_WritePin(GPIOB, scl,GPIO_PIN_RESET); //拉低時鐘線 delay_us(5); //延時
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP; HAL_GPIO_Init( GPIOB, &GPIO_InitStruct );
return mcy;}
3.6 IIC發送一個字節
/**************************************向IIC總線發送一個字節數據**************************************/void BH1750_SendByte(uchar dat){ uchar i;
for (i=0; i《8; i++) //8位計數器 { if( 0X80 & dat ) HAL_GPIO_WritePin(GPIOB, sda,GPIO_PIN_SET); else HAL_GPIO_WritePin(GPIOB, sda,GPIO_PIN_RESET);
dat 《《= 1; HAL_GPIO_WritePin(GPIOB, scl,GPIO_PIN_SET); //拉高時鐘線 delay_us(5); //延時 HAL_GPIO_WritePin(GPIOB, scl,GPIO_PIN_RESET); //拉低時鐘線 delay_us(5); //延時 } BH1750_RecvACK();}
3.7 IIC讀取一個字節
/**************************************從IIC總線讀取一個字節數據**************************************/uchar BH1750_RecvByte(){ uchar i; uchar dat = 0; uchar bit;
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT; /*這里一定要設成輸入上拉,否則不能讀出數據*/ GPIO_InitStruct.Pin = sda; GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW; HAL_GPIO_Init( GPIOB, &GPIO_InitStruct );
HAL_GPIO_WritePin(GPIOB, sda,GPIO_PIN_SET); //使能內部上拉,準備讀取數據, for (i=0; i《8; i++) //8位計數器 { dat 《《= 1; HAL_GPIO_WritePin(GPIOB, scl,GPIO_PIN_SET); //拉高時鐘線 delay_us(5); //延時
if( SET == HAL_GPIO_ReadPin( GPIOB, sda ) ) bit = 0X01; else bit = 0x00;
dat |= bit; //讀數據
HAL_GPIO_WritePin(GPIOB, scl,GPIO_PIN_RESET); //拉低時鐘線 delay_us(5); //延時 }
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP; HAL_GPIO_Init( GPIOB, &GPIO_InitStruct ); return dat;}
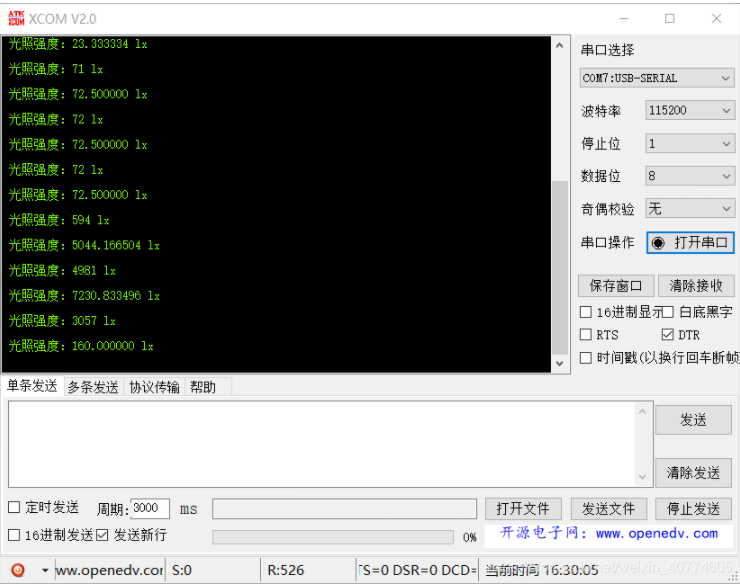
四、測試結果與光照強度參考
測試結果
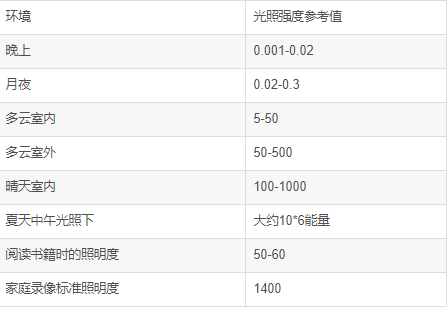
光照強度參考值
編輯:lyn
-
轉換器
+關注
關注
27文章
9418瀏覽量
156335 -
IIC接口
+關注
關注
0文章
23瀏覽量
12017 -
GY-30
+關注
關注
1文章
8瀏覽量
13511
原文標題:智能花盆2.0驅動:基于STM32_HAL庫GY-30(BH1750FLV)驅動
文章出處:【微信號:IoTMaker,微信公眾號:機智云開發者】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
關于NCP81155 MOSFET驅動器的設計解讀
【瑞薩RA6E2地奇星開發板試用】SHT30傳感器串口調試學習和驗證
SiLM27531HAC-AQ 30V, 5A/5A單通道高欠壓保護閾值的高速低邊門極驅動器
STMicroelectronics CAM-66GY相機模塊技術解析與應用指南
SiLM8260ABCS-AQ雙通道隔離驅動30V/10A 帶米勒鉗位的雙輸入半橋驅動器
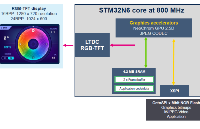
基于意法半導體STM32N6和VD66GY的機器視覺方案
【直播預告】《實時操作系統應用技術—基于RT-Thread與ARM的編程實踐》教學脈絡及資源簡介

使用 dsPIC30F 實現 BLDC 電機的正弦電壓驅動
技術驅動未來:2QD30A17K-I-xx雙通道IGBT驅動核深度解析

一款內置4個穩壓環節的交流直接驅動LED芯片-WD15-S30T

一款內部有4個步驟交流直接LED驅動IC-WD15-S30A

效率提升20%,噪音降低30%!智能風扇的電機驅動方案有多強?




 工商網監
工商網監
評論