 IRIM LAB實驗室分享底盤十分靈活可變四輪的機器人
IRIM LAB實驗室分享底盤十分靈活可變四輪的機器人

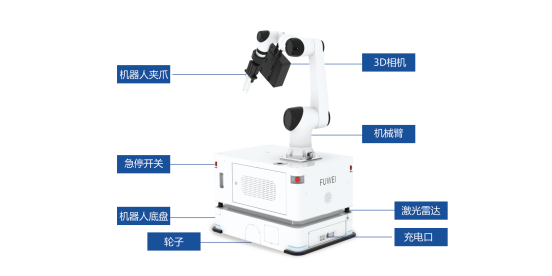
來自韓國IRIM LAB實驗室最近分享的一款可變四輪的機器人底盤十分靈活,它結合了輪足機器人、麥克納姆輪的多種結構的優點。
這個底盤的最終想法應該是安裝在該實驗的LIMS2仿人雙臂機器人上。
LIMS2-AMBIDEX可不是個木樁,它的手速給大家展示一下。
一看就詠春后人制作出來的,這標準的拳法,讓人目不暇接。
LIMS2-AMBIDEX的整體尺寸和關節自由度排布
為了驅動手臂,設計人員采用了肌腱驅動(Tendon-driven)的設計方式,這項設計通過使用“線”和塑料等材料來模仿肌肉和肌腱實現對生物體四肢的仿生。
同時,設計人員將整個機器人的驅動器都集中到了機器人的肩部,質量大致分布是單臂重量為6.8kg,其中肩關節4.17kg,其它關節2.63kg,這樣較好的減小了機械臂末端執行器的慣量,所以,這給它的快增色不少。
手肘部分只有一個俯仰自由度,通過”肌腱“(線)在肩部驅動器的驅動下實現俯仰運動.
咱們在“機械設計和機械制造合集”動圖的第七期中分享過一個靈巧的傳動構件
這個靈巧的構件其實就是用在LIMS2-AMBIDEX手腕處的。
接下來咱們通過一個視頻來了解一下LIMS2-AMBIDEX機器人。
最后咱們來看細節的研究,手部。
IRIM Lab實驗室對于手部的研究也有多個產品。首先看一個他們設計的新一代機械手FLLEX,改進了機械手的握力,視頻末尾演示了機械手拿著錘子敲釘。
完美仿真了人類的手部,手指隨便掰也能馬上復原,一般的力擊打也能承受住,比真手抗沖擊力強。
再看IRIM Lab實驗室另外一個欠驅動機械抓手——BLT抓手。這款抓手有著3根手指,5個單獨可控的電機,可以實現由捏取和抓握兩種狀態的自由,順暢的切換,仿佛人手般靈活。
這款抓手結構簡單巧妙,有著3根手指,5個單獨控制的自由度,可以實現由捏取和抓取兩種狀態的自由,順暢的切換。
該機械手手指采用外側剛性結構作為抓取驅動,內側柔性帶結構作為抓取交互,從而實現了指尖部分的捏取和指內側具有自適應均勻抓取壓力分布的抓握。
柔性帶內側摩擦力較小,使得物體可以沿著帶滑動,讓被抓取物體可以由捏取狀態輕松切換到抓握狀態。
機械爪手的驅動單元設計
據研究者測試,BLT抓手的每根手指最大抓握力可達6kg,抓手的整體抓取載荷可達15kg。
LIMS2-AMBIDEX機器人投籃練習。
一路看下來,是不是對于韓國IRIM Lab實驗室的機器人研究有了大體的了解,對于新結構的研究和部件的開發一步一步的穩扎穩打,每一個細節都竭盡全力做到優秀,其最大的特點就是驅動,如果以后材料的發展迎來大爆發,這將是最接近于人的機器人了。
在日本本田的ASIMO、波士頓動力的Atlas之后,一款強大的類人機器人又將呼之欲出了。
當然,根據ASIMO、Atlas的發展來看,最終結合市場的程度才有更長遠的未來,韓國IRIM Lab實驗室無疑很清楚這一點,每款設計同時都會考慮實際應用和商業化等因素,做到了最優化設計。
原文標題。四輪人形機器人又添新成員,雙臂靈活,拳法標準
文章出處。【微信公眾號。機器人在線訂閱號】歡迎添加關注!文章轉載請注明出處。
責任編輯:haq
-
機器人
+關注
關注
213文章
31073瀏覽量
222185
原文標題:四輪人形機器人又添新成員,雙臂靈活,拳法標準
文章出處:【微信號:im_robotic,微信公眾號:機器人在線訂閱號】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
再談低溫燒結銀的應用:從春晚四家機器人出鏡的幕后推手說起
黑芝麻智能與聯想研究院機器人實驗室達成戰略合作
經世智能復合機器人,助力實驗室檢測樣本上下料,提升實驗效率

混凝土檢測實驗室:經世智能復合機器人,助力水泥試塊上下料

天太機器人與廣州大學共建“機器人研發實驗室”,產學研協同開新篇章

NVIDIA Isaac Lab推動機器人技術突破
康復機器人從實驗室走向未來的醫療變革
外交部:機器人正從實驗室走向生活 2025世界人形機器人運動會亮點很多
復合機器人:解鎖實驗室自動化的高精度智能引擎
智慧實驗室行業|復合機器人樣本轉運及上下料解決方案

復合機器人在實驗室物料轉運場景的應用價值:低成本,高精度,高柔性

具身智能機器人在檢驗檢測實驗室應用的技術路徑探討
實驗室安全管理成焦點,漢威科技賦能實驗室安全升級




 工商網監
工商網監
評論