 激光雷達的使命
激光雷達的使命

背景介紹
近日,中共中央、國務院印發了《國家綜合立體交通網規劃綱要》,并發出通知,要求各地區各部門結合實際認真貫徹落實。文件中特別指出,要提升智慧發展水平。推動智能網聯汽車與智慧城市協同發展,建設城市道路、建筑、公共設施融合感知體系,打造基于城市信息模型平臺、集城市動態靜態數據于一體的智慧出行平臺。
車路協同系統是通過無線通訊設備實現車、路信息交互和共享的系統,更是推動智能網聯汽車行業的核心技術之一。在國家利好政策和5G商用的驅動下,中國車路協同行業市場規模將于2024年達到1841.1億元人民幣。專家表示中國車路協同行業將于2021-2022年迎來爆發式增長,屆時中國車路協同行業將步入大規模商業化階段,進而推動中國自動駕駛和智慧交通邁入新階段。
中國車路協同行業市場規模將于2024年達到1841.1億元人民幣,預計2020至2024年中國車路協同行業市場規模年復合增長率將達到67.9%
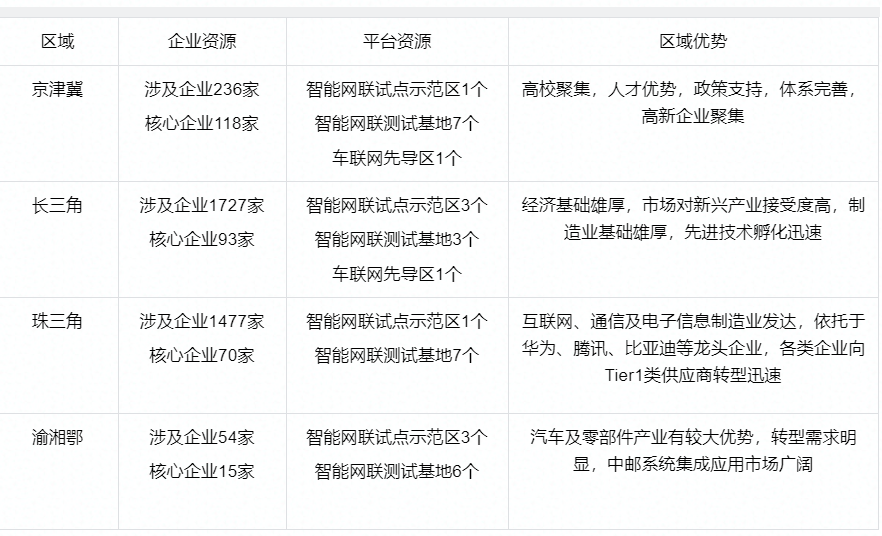
圖 2020-2024中國車路協同行業規模(按產值計算) 預測 隨著車路協同技術的逐漸普及,北京、上海、重慶和浙江等地區迅速出擊,頒布相應的地方性政策,根據城市特色建立智能網聯汽車試點示范區。 表 國內熱點產業集群資源梳理
車路協同,最終需要提高的是車和路的“智能化水平”,以達到安全自動行駛的目的,也可以說,車路協同的智能化是無人駕駛實現的另一種進程。激光雷達是車端無人駕駛的核心感知傳感器,是路端的路側傳感器,也就是我們經常說的路側單元RSU,通過5G和其他通信方式,為車輛提供交通環境信息。那么激光雷達需要如何做,才能完成路端的使命呢?
圖1 車路協同系統配合示意圖
一
激光雷達的使命
安全智能行駛,對于車和路來說,都是繞不開的話題。車路協同中,激光雷達不僅要完整、準確感知交通環境的各種車輛、人員、基礎設施的狀態,還需要足夠的安全冗余,應對各種“長尾效應”帶來的問題。其實,真正的車路協同并不比自動駕駛門檻低。
圖2 北醒Horn系列激光雷達探測十字路口點云效果
二
為什么是激光雷達
攝像頭的缺陷主要來自于光線,在光線較差或強光干擾下,誤判率高。探測距離受到光線影響變短,精度變低等。采用單一攝像頭在路端計算需要極強的算力,信號傳輸和處理會有帶寬和實時性的影響等。毫米波的缺陷主要在于對完全靜止的物體幾乎沒有什么回波,而處于某些金屬干擾的環境下,容易產生誤報。激光雷達本身對環境光不依賴,24h全天時工作,因此大大增強了感知的適應性,對目標物的三維探測能力增強了探測的準確性,無論是靜態或動態物體,均可捕捉。 路端的場景十分復雜,以在流量較大的十字路口為典型。事實上,僅僅依靠一種技術手段,誤報、漏報都將成為安全隱患,無法對路況信息實現穩定的智能檢測。如果將激光雷達與攝像頭融合,一次性獲得物體的位置、距離、尺寸、速度、方向、顏色等信息。
圖3 北醒Horn系列激光雷達識別十字路口車輛及行人 1. 極強的數據采集能力1.1 探測距離遠 機械旋轉雷達一般有效測距為150到200米,采用1550nm人眼安全的北醒Horn系列激光雷達,探測距離可以超過300米,300米意味著在路端布線時,可以減少硬件成本,降低施工壓力。 1.2分辨率高 市場上常見的激光雷達以16線、32線、64線為主,線束對應的參數是分辨率。圖像級激光雷達還是數字激光雷達,都是將線束做到非常高,從而后期算法要求降低了難度,降低感知層面的難度。北醒和一些激光雷達廠商為了解決遠距離小目標物探測能力,已經將分辨率做到了300-600線。針對車路協同應用,路面目標物種類多、數量多的特點,分辨率越高越能快速識別出來。
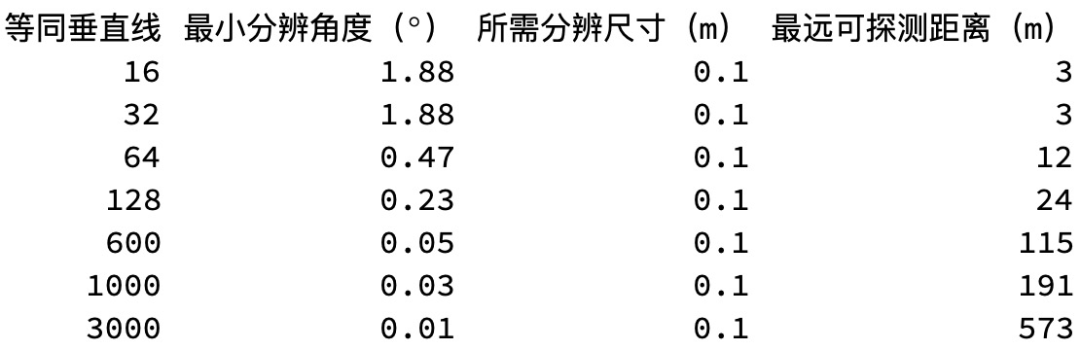
圖4 北醒Horn系列激光雷達探測的斑馬線 小目標物由于體積很小,因此激光雷達發射出去的光很難被接收回來。分辨率的高低主要由垂直角分辨率決定。垂直角分辨率的數值越小,代表則能探測到目標物的點越多,探測的清晰度越高,對于小目標物的點獲取越多。如下圖所示,垂直方向的間隔小,點云數量多。
圖5 同等距離下,垂直分辨率0.05°和0.1°的行人點云對比圖 在垂直方向角分辨率上,北醒激光雷達的垂直角分辨率可精確到0.05°,是64線激光雷達的9.4倍,可以對遠距離小目標物精準探測,對行人實際可探測與識別能力達到115米,而64線激光雷達線束過低,實際可探測與識別能力僅為12米以內。 表1 激光雷達等同線數與可識別小物體(0.1m)的最遠距離關系
1.3 視場角廣 路口安裝的攝像頭的覆蓋區域一般只有10°左右,視野范圍較窄。360°機械旋轉雷達無疑擁有更多的視野,但是內部旋轉結構讓其使用壽命一直存疑。北醒Horn系列激光雷達不采取機械同軸旋轉結構,具有橫向90°的視場角度,探測范圍遠遠大于攝像頭,單臺可以覆蓋300m*300m的大場景。因此,檢測相同路口,安裝激光雷達的數量將遠少于攝像頭的數量。激光雷達方案比單一攝像頭方案更利于檢測大視野的闖紅燈區域。 2. 融合的數據的能力2.1 集成攝像頭等傳感器 單一的攝像頭方案只能提供二維信息,在強光或逆光時,拍攝及探測效果容易失效。特別在夜晚無環境光的情況下,攝像頭方案基本失去作用。傳統機械式雷達提供的點云非常稀疏,特別是掛在路測后,搜集到的有效點很少,很難與其它傳感器融合。 北醒激光雷達可以提供每秒超過280萬個點,最高1800*600的點云輸出,易于與攝像頭進行圖像融合。這樣的結合無論是汽車還是其他交通工具,均可以通過追蹤像素,達到避障、減速、繞行的目的。這無疑是為自動駕駛及輔助駕駛帶來新契機。
圖6 點云+攝像頭融合數據(左)和點云數據(右) 3. 部署方案簡單3.1 支持客戶部署方案 在車路協同應用中,為完美呈現Horn系列激光雷達的點云感知功能,北醒還將為客戶提供支持,輔助客戶基于北醒三維點云進行分析,各種傳輸協議,輔助客戶項目快速落地和交付,實現對行人闖紅燈報警、車輛碰撞預警、違法行為抓拍等功能。
圖7 基于北醒激光雷達實現的車輛識別 3.2 安裝部署 對于路測安裝的激光雷達來說,一般會選取高度在6-7米的電線桿或電警桿橫桿上。安裝位置一般靠近道路中央,如圖8所示,北醒Horn系列激光雷達探測距離遠且視場角寬,一臺即可同時檢測道路往返雙通道中不同車道上的目標物。對于視場角較小的雷達,至少需要安裝2臺以上激光雷達。
圖8 北醒Horn系列激光雷達路側安裝方式 4. 易集成量產 360°機械旋轉雷達由于機械旋轉激光雷達在工作過程中整體光學和電子器件模組不斷旋轉,部件容易損耗,并且組裝雷達過程中需要每個發射器和接收光子探測器的視場角度一一對應,需要人工調教,不利于自動化生產,量產較難。 市場上相對成熟、性能較好的是 32 線激光雷達,出貨幾千套的情況下報價為 4 萬美元一個。北醒激光雷達采取光學一體化設計,實現產品小型化、輕量化,通過布局整個大交通領域來逐步實現量產,將成本大大降低。在車路協同應用中,綜合考慮布置數量和軟件能力,更快的降低總成本。
圖9 北醒Horn-X2激光雷達實拍圖
三
典型功能
城市道路 ETC高速公路 人車安全預警 觸發抓拍 交通違章檢測 車輛信息檢測 車流量統計 異常事件預警 交通綜合監控和指揮管理 交通監控和管理
責任編輯:lq
-
激光雷達
+關注
關注
980文章
4473瀏覽量
196587 -
無人駕駛
+關注
關注
100文章
4297瀏覽量
126856 -
智能網聯汽車
+關注
關注
9文章
1300瀏覽量
31863
原文標題:激光雷達在車路協同的“使命”是什么?
文章出處:【微信號:MEMSensor,微信公眾號:MEMS】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
車載激光雷達溫度監控:NTC芯片的核心應用
自動駕駛激光雷達會傷害人體嗎?

禾賽科技位列全球激光雷達行業專利第一

如何解決激光雷達點云中“鬼影”和“膨脹”問題?

禾賽科技與理想汽車續簽激光雷達合作
激光雷達為什么會出現串擾的問題?

華為,激光雷達第一! 車載激光雷達市場的“隱形冠軍”

800線!禾賽發布ETX激光雷達

FMCW激光雷達,加速落地工業場景
SPAD席卷車載激光雷達市場
超酷的樹莓派激光雷達掃描儀!

激光雷達(LiDAR)技術方案與工作原理全解析

自動駕駛激光雷達:原理、類型與應用梳理




 工商網監
工商網監
評論