 在MM32F013x上實現UART極性取反的功能應用
在MM32F013x上實現UART極性取反的功能應用

本文是針對在MM32F013x上實現UART極性取反的功能應用。
在嵌入式領域,通常默認串口的電平是高電平為邏輯1,低電平為邏輯0,而在MM32的UART特性中是可以將高電平設置為邏輯0,低電平設置為邏輯1的,UART極性取反雖然不常用,但還是在特殊情況下是需要這個功能,比如硬件設計已經導致必須使用極性取反,否則電路就要改板或者增加反相電路。例如下圖的UART隔離電路就需要UART發送極性取反功能。
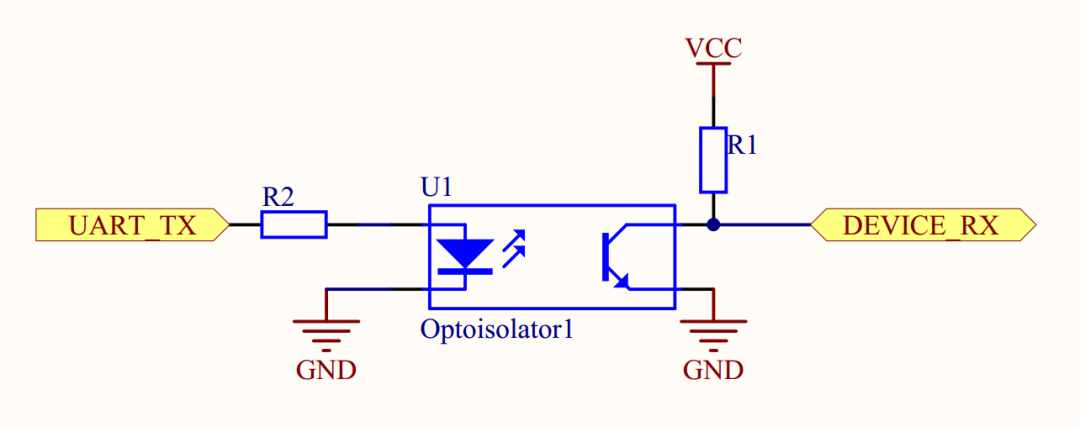
圖1 UART隔離電路
01、UART極性取反簡介
UART極性取反下的電平與正常模式下的電平是相反的,正常情況下,UART空閑時電平是高,起始位是空閑狀態下變成低電平,bit為1時電平也高。在UART極性取反狀態下,空閑電平是低電平,起始位是高,bit為1時電平是低。
在數據接收發送寄存器中,數據也是可以反轉的,原來的0變為1,原來的1變為0,這和電平極性反轉是類似。需要特別注意的是,在極性反轉的時候,起始位和結束位也都反轉了,所有的信號電平都反轉;而在數據寄存器中只反轉了數據位,其中也包含了校驗位,沒有反轉信號的起始位和結束位的極性。
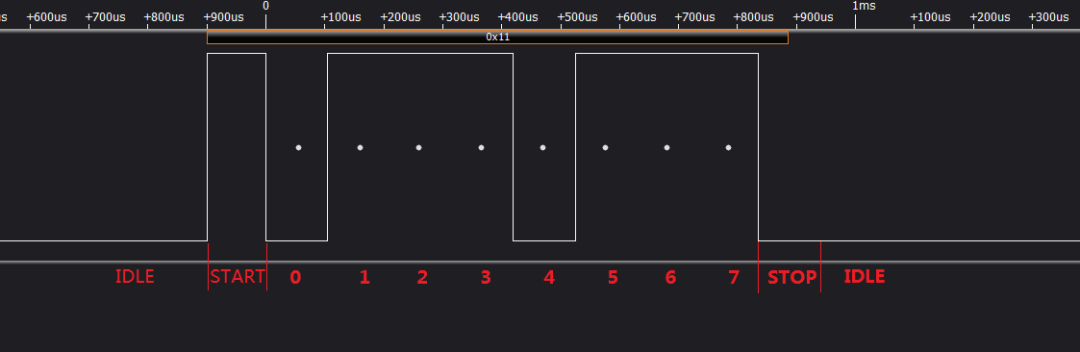
圖2 UART極性取反波形
上圖是用邏輯分析儀抓取的UART極性取反的邏輯波形。紅色字體:“IDLE”部分是空閑狀態,“START”是起始位,后面“0~7”是數據的bit0~bit7,“STOP” 是停止位,“IDLE”是空閑(注意,邏輯分析儀設置反向,不然只能抓到波形,無法解析出數據)。
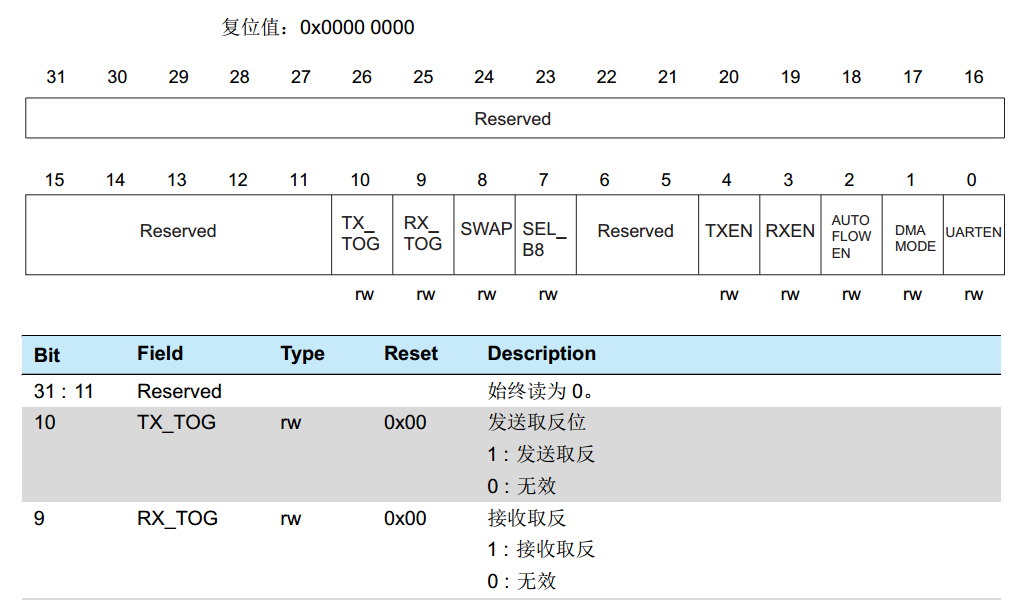
圖3 UART極性取反控制位
UART->GCR寄存器描述
設置寄存器 TX_TOG位來使能UART發送極性取反功能。
如果UART接收極性也需要取反,則設置RX_TOG位來使能UART接收極性取反功能。
除了設置上述2個位外,其他部分的設置跟普通模式一模一樣。
02、初始化UART1
從官網上下載MM32F013x例程,里面有UART普通模式的配置,主要是增加了UART->GCR的TX_TOG和RX_TOG位設置,如下:
void uart_nvic_init(u32 bound) { GPIO_InitTypeDef GPIO_InitStructure; UART_InitTypeDef UART_InitStructure; NVIC_InitTypeDef NVIC_InitStructure; RCC_APB2PeriphClockCmd(RCC_APB2Periph_UART1, ENABLE); RCC_AHBPeriphClockCmd(RCC_AHBPeriph_GPIOA, ENABLE); GPIO_PinAFConfig(GPIOA, GPIO_PinSource9, GPIO_AF_1); GPIO_PinAFConfig(GPIOA, GPIO_PinSource10, GPIO_AF_1); //UART1 NVIC NVIC_InitStructure.NVIC_IRQChannel = UART1_IRQn; NVIC_InitStructure.NVIC_IRQChannelPriority = 3; NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; NVIC_Init(&NVIC_InitStructure); //Baud rate UART_StructInit(&UART_InitStructure); UART_InitStructure.BaudRate = bound; //The word length is in 8-bit data format. UART_InitStructure.WordLength = UART_WordLength_8b; UART_InitStructure.StopBits = UART_StopBits_1; //No even check bit. UART_InitStructure.Parity = UART_Parity_No; //No hardware data flow control. UART_InitStructure.HWFlowControl = UART_HWFlowControl_None; UART_InitStructure.Mode = UART_Mode_Rx | UART_Mode_Tx; UART_Init(UART1, &UART_InitStructure); UART_ITConfig(UART1,UART_IT_RXIEN,ENABLE); UART1->GCR |= UART_GCR_TXTOG; //發送取反位 UART1->GCR |= UART_GCR_RXTOG; //接收取反位 UART_Cmd(UART1, ENABLE); //UART1_TX GPIOA.9 GPIO_StructInit(&GPIO_InitStructure); GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; GPIO_Init(GPIOA, &GPIO_InitStructure); //UART1_RX GPIOA.10 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_FLOATING; GPIO_Init(GPIOA, &GPIO_InitStructure); }
03、功能測試
UART極性取反測試可以自發自收,需要將PA9和PA10短接,需要注意的是收發都需要配置成極性取反功能。在main函數所在.c文件里面,定義一個u8型全局變量UART_SendValue,UART_SendValue每隔500ms自加1,然后通過UART發送出去,依次循環。
u8 UART_SendValue = 0; s32 main(void) { DELAY_Init(); LED_Init(); uart_nvic_init(9600); while(1) { UartSendByte(++UART_SendValue); DELAY_Ms(500); } }
在UART的中斷服務函數里面,將接收到的數據存放在printBuf,這樣可以在仿真界面下的watch窗口觀看printBuf的值是否每隔500ms增加一次并且和UART_SendValue的值一致。
void UART1_IRQHandler(void) { if (UART_GetITStatus(UART1, UART_ISR_RX) != RESET) { UART_ClearITPendingBit(UART1, UART_ISR_RX); printBuf = UART_ReceiveData(UART1); } }
下圖仿真界面下可以看到printBuf和UART_SendValue的值是一致的。
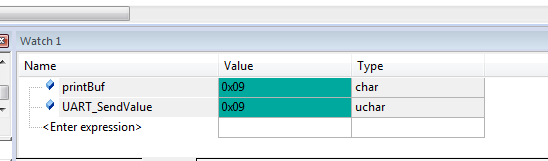
圖4 UART仿真watch窗口數據對比
下圖邏輯分析儀抓取的邏輯波形,可以看到電平和分析到的數據都是一致的。
轉自:靈動微電子
審核編輯:何安
-
uart
+關注
關注
22文章
1314瀏覽量
106634 -
靈動微電子
+關注
關注
7文章
137瀏覽量
20479
發布評論請先 登錄
深入探索MSP430F14x、MSP430F14x1和MSP430F13x混合信號微控制器
在CW32F030的IAP應用介紹
如何在CW32F030上實現IAP功能實現遠程升級?
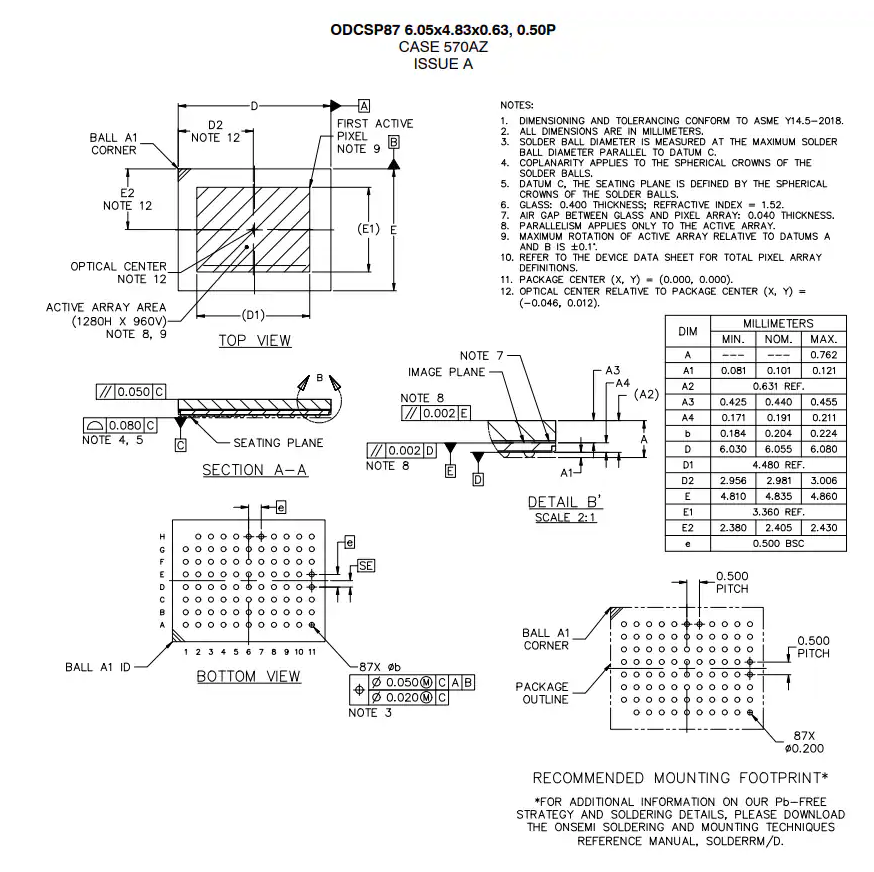
?onsemi AF013x Hyperlux? 1.2MP iToF傳感器技術解析與應用指南
【瑞薩RA6E2】+2、實現通過UART點燈
靈動MM32F0010微控制器在智能照明中的應用
STEVAL-LLL013V1 LED矩陣面板技術解析與應用指南
用于RISCV的F指令集實現的浮點計算單元(FPU)設計方案
廣州唯創電子WT588F(C013)語音芯片:賦能智能玩具的“聲”動未來

PCB絲印極性標記的實用設計技巧
靈動微電子推出全新超值型MM32F0050系列MCU




 工商網監
工商網監
評論