 混合算法(GA+TS)求解作業車間調度問題—禁忌搜索部分
混合算法(GA+TS)求解作業車間調度問題—禁忌搜索部分

大家好,在上一篇文章中,我們介紹了FJSP問題以及HA算法的GA部分。這一篇文章主要介紹嵌套在其中的Tabu Search部分。
種群進化+鄰域搜索的混合算法(GA+TS)求解作業車間調度問題(JSP)-算法介紹
Tabu部分原論文沒有很詳細的描述,因此很多內容是小編收集各方資料,查閱其他相關文獻總結出的結論,小編自己編寫了三個tabu search,在這里分別分享介紹一下。如有專門研究這塊的同學,歡迎隨時指點交流!
代碼會在下一期統一給出,請關注我們!
Tabu1-基于編碼
在之前的文章中說過,算法對每一代子代的每一個個體,都需要decode成可行解,然后運用禁忌搜索優化解,再編碼回GA編碼,進入下一代。可想而知,如果tabu寫的不好,算法的耗時肯定會很高。
論文中的tabu其實是以第二種為主體的。基于編碼的tabu相對而言比較盲目,當初編寫時也是基于試一試的心態。
前文提到,對一串合法的OS序列,無論進行怎樣的交換、插入運算,都可以解碼成可行解;對MS序列,在同一工件范圍內任意交換順序,也可以保證得到可行解。
因此,小編在代碼中簡單設計了兩種鄰域:1. 對相鄰的OS編碼進行交換操作;2. 對MS編碼的每個位置分別采用GA中的變異操作。
swap很簡單,再重復一下MS的變異:
隨機選擇MS中一半的數字,隨機換為對應操作可以選擇的某個機器。例如圖中長度為6的MS String,隨機選擇三個位置,對O11而言,共有三個機器可選擇,則隨機選擇1,2,3中一個數字替換掉原先的2。
鄰域部分代碼(開啟了一個50%的采樣):
for (int i = 0; i < chromosome.gene_OS.length - 1; i += 2)
for (int j = i + 1; j < chromosome.gene_OS.length; j += 2)
if(r.nextDouble() < 0.5)
OSs.add(swap(chromosome.gene_OS, i, j));
for (int i = 0; i < chromosome.gene_MS.length; i++)
if(r.nextDouble() < 0.5){
int[] MS = chromosome.gene_MS.clone();
MSs.add(chromOps.machineSeqMutation(MS));
}
結論:這個鄰域設計的比較隨意,但經過小編的測試后發現效果不佳,小編在這里建議大家不要使用基于編碼的鄰域搜索。
Tabu2-基于析取圖的k-insertion
析取圖
對JSP和FJSP來說,除了用甘特圖表示解意外,還有一個很重要的表示解的結構:析取圖。
析取圖是一張有向圖。圖中的點表示工序,邊代表工序加工的順序。
-
混合算法
+關注
關注
0文章
7瀏覽量
6721 -
車間調度
+關注
關注
0文章
4瀏覽量
7033
發布評論請先 登錄
疆鴻智能PROFINET轉DEVICENET的車間對話:網關重塑AGV控制流
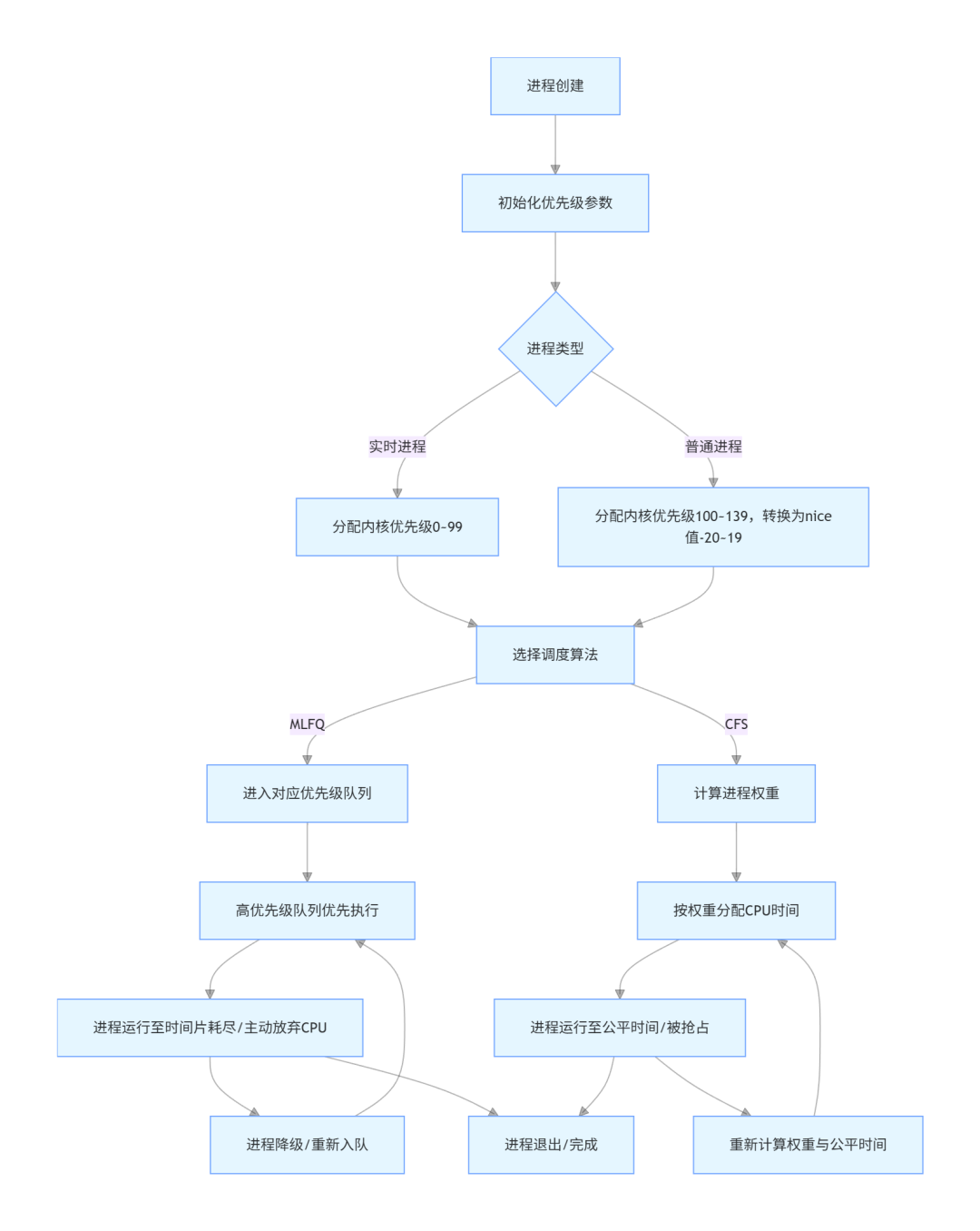
深入Linux內核:進程調度的核心邏輯與實現細節
線性搜索與二分搜索介紹
西格電力智慧能源管理平臺——算法如何優化調度?
【產品介紹】Altair PBS Professional HPC工作負載管理器和作業調度管理系統

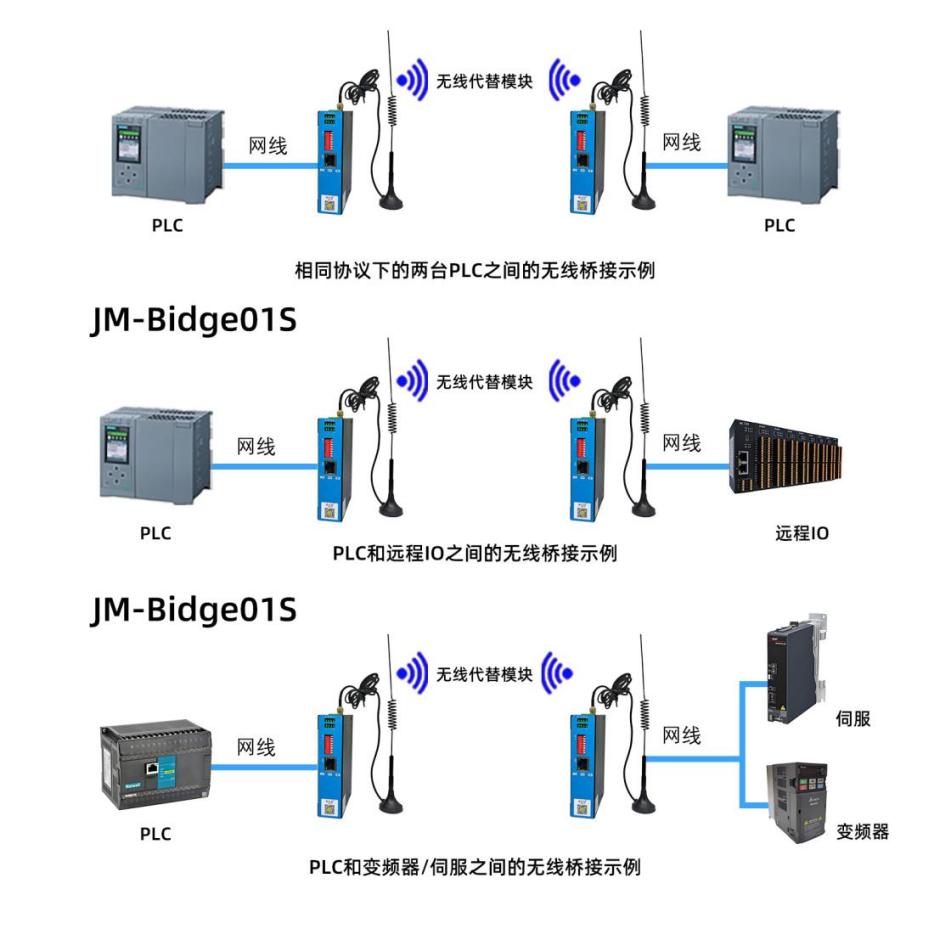
電解車間雙車無線協同:基于工業網橋的高效通訊實戰案例
商湯大裝置發布基于DeepLink的異構混合調度方案
FPGA使用Cordic算法求解角度正余弦值

AGV通信第5期 多AGV協同調度解決方案,賦能高密度物流作業

黑芝麻智能視覺與4D毫米波雷達前融合算法介紹

LSM6DSV16X內置的傳感器融合算法SFLP,輸出的四元數是自身坐標系下的還是全局坐標系下的?
提取LSM6DSV16X內置低功耗融合算法輸出的四元數后,轉換成歐拉角后遇到一個問題求解
京東百萬級調度系統(Buffalo)架構解密

工廠車間專用生產執行管理系統(MES)有什么功能?




 工商網監
工商網監
評論