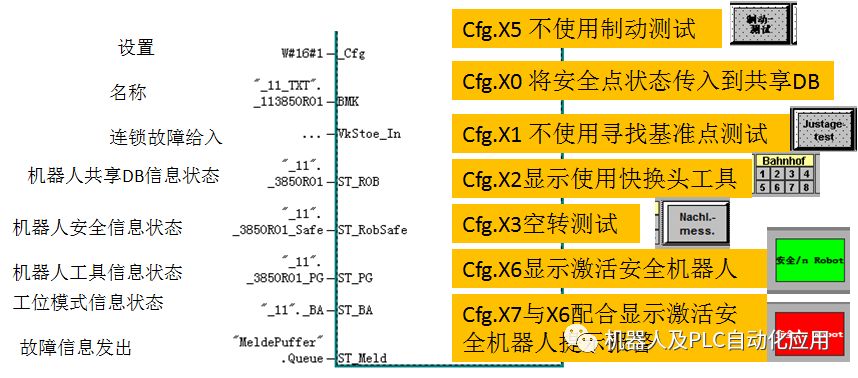
 控制KUKA安全機器人的PLC標準功能塊FB 292
控制KUKA安全機器人的PLC標準功能塊FB 292




聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
機器人
+關注
關注
213文章
31078瀏覽量
222205 -
plc
+關注
關注
5051文章
14594瀏覽量
486893 -
KUKA
+關注
關注
3文章
218瀏覽量
17474
原文標題:控制KUKA安全機器人的PLC標準功能塊FB 292
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
熱點推薦
高精度機器人控制的核心——基于 MYD-LT536 開發板的精密運動控制方案
一、背景:機器人邁向“微米級控制時代”
隨著智能制造和自動化產業的持續升級,工業機器人不再僅僅承擔重復搬運,而是被要求在裝配、檢測、精密加工等高精度場景中完成微米級控制任務。
在這些“
發表于 11-14 15:48
RK3576機器人核心:三屏異顯+八路攝像頭,重塑機器人交互與感知
、遠程作業機器人、特種檢測機器人· 多攝像頭輸入:通過多路攝像頭無死角監控作業現場,實現精準操作與安全監控。· 多屏顯示:將不同視角的畫面、傳感器數據、控制界面分別顯示,幫助操作員遠程
發表于 10-29 16:41
揭秘工業 4.0 機器人:感知、安全和控制技術
范圍內的可擴展部署。這些系統需要傳感器、安全硬件、電路保護和控制組件,以滿足高帶寬、實時響應和嚴格功能安全標準的要求。 本文探討了支撐工業

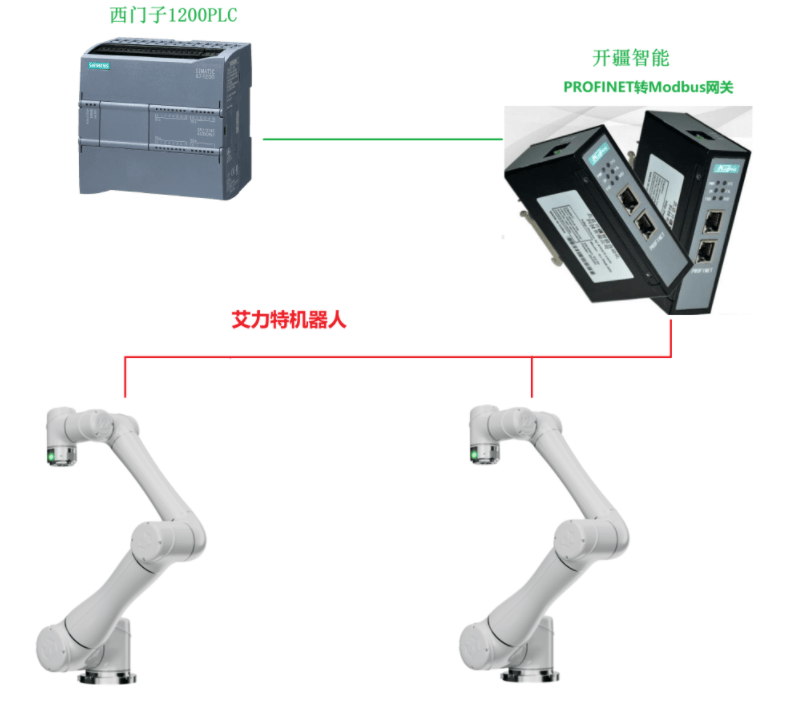
開疆智能Profinet轉ModbusTCP網關連接艾力特機器人配置案例
本案例是西門子PLC通過Profinet轉ModbusTCP網關將機器人與PLC進行連接,保證數據可以進行轉換。 配置方法: 器人做從站 機器人
ADI安全產品如何簡化不同機器人控制系統中安全機制的實現
我們將探討各種機器人安全用例,展示ADI的安全產品如何簡化不同機器人控制系統中安全機制的實現。

ADI解讀機器人控制系統中的安全風險和有效安全措施 為機器人技術的未來發展筑牢安全防線
本文探討了機器人控制系統中的安全風險和有效安全措施。文中介紹了工業安全標準,并分析了滿足工業

工業機器人的特點
是實現工業互聯網的基礎,也是第一步。
三大優勢:提高產品品質、提高產出、適用范圍廣
機器人在生產上的優勢可以分為提高產品品質、提高產出以及適用范圍廣三個方面。提高產品品質
工業機器人的標準化、精細化
發表于 07-26 11:22
盤點#機器人開發平臺
地瓜機器人RDK X5開發套件地瓜機器人RDK X5開發套件產品介紹 旭日5芯片10TOPs算力-電子發燒友網機器人開發套件 Kria KR260機器人開發套件 Kria KR260-
發表于 05-13 15:02
詳細介紹機場智能指路機器人的工作原理
機場智能指路機器人主要依靠感知系統、定位系統、導航系統、智能交互系統和運動系統協同工作,來實現為旅客準確指路和提供服務的功能,以下是其詳細工作原理:
感知系統
傳感器類型 :機器人配備了多種傳感器
發表于 05-10 18:26
【「# ROS 2智能機器人開發實踐」閱讀體驗】機器人入門的引路書
的非常好的,特別是一些流程圖,很清晰的闡釋了概念
很適合作為初學者入門的引路書
還能了解很多技術和框架,破除初學者的自負困境,讓初學者知道功能是由很多開發者維護的,前人已經為各種產品搭建了完善的框架。避免陷入得一個人單打獨斗的錯覺
一直蠢蠢欲動ros2和
發表于 04-30 01:05
【「# ROS 2智能機器人開發實踐」閱讀體驗】+內容初識
規劃:導航是機器人自主運行的關鍵功能。書中詳細介紹了基于 ROS 2 的導航系統,包括地圖創建、路徑規劃和導航控制等環節。首先,通過激光雷達等傳感器獲取環境信息,使用 SLAM(Simultaneous
發表于 04-27 11:24
發那科機器人A型控制柜急停板安全回路接線方法
發那科機器人A型控制柜的安全回路接口涵蓋了外部急停輸入、安全門開關、機器人急停輸出以及伺服切斷等多個功能
庫卡KUKA機器人常見故障維修
1、KUKA機器人伺服電機維修過熱原因 ①電源電壓過高; ②電源電壓過低,電機在額定負載下運行,電流過大使線圈發熱; ①修理和拆卸線圈時,熱拆卸方法不正確,會燒壞鐵芯; ①發動機過載或頻繁啟動



 工商網監
工商網監
評論