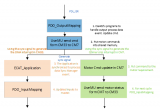
 ARM代碼編譯鏈接的工作流程
ARM代碼編譯鏈接的工作流程

ARM處理器在市面上到處都是ARM7、ARM9、Cortex-M、Cortex-R、Cortex-A包含的種類繁多,今天我們就來了解一下ARM代碼編譯鏈接的工作流程,以及過程中需要的相關概念信息。
編譯過程編譯過程就是把源代碼編譯生成目標代碼的過程。而采用ARM編譯命令,可以將源代碼編譯成帶有ELF格式的目標文件。除了編譯命令可以選擇相應的編譯選項之外,源代碼中的pragmas以及特別的關鍵字也會對編譯過程/結果產生一定影響。
makefile文件Makefile類似一個腳本文件,這個文件用來定義編譯過程,其中包含了需要編譯的文件、文件順序,編譯的宏定義等等,可以看做完整編譯需要的信息及過程的集合。 2.ELF格式文件ELF文件:(Executable and Linkable Format) ELF文件出了包含編譯出的二進制代碼,還包含其他鏈接需要信息,ELF格式提供了相應代碼/數據對應編譯出的地址信息、文件信息等內容。
鏈接過程鏈接就是把編譯生成的目標文件和鏈接庫處理成為相應ELF格式的映像文件(image),最終的文件可以寫入嵌入式系統的ROM/FLASH中。映像文件中包含:分組信息和定位信息,亦即輸出段/域及地址定位信息。鏈接器同時可以生成相應與域有關的符號來指示關于加載時地址、運行時地址、加載時長度限制、運行時長度限制等信息。同時鏈接器也具有優化的功能,刪除不必要的代碼、段域等。
1.映像文件的組成一個映像文件包含一個或多個域;一個域包含一個或多個輸出段;一個輸出段包含一個或多個輸入段;輸入段中包含了目標文件的代碼和數據。 輸入段的內容:代碼、已初始化的數據、未初始化的數據、初始化0的存儲區域。 輸出段和域中包含:RO、RW、ZI域。
2.映像文件的地址映射加載時地址和運行時地址的區別:加載時地址是運行前的地址,簡單理解在FLASH中固定存儲即為加載時地址,而若代碼載入RAM運行時,新的地址為運行時地址;而程序在FLASH中運行,加載時地址和運行時地址就一致了。當地址映射復雜時,可以通過scatter配置文件進行設置。
3.初始入口點和普通入口點初始入口點:運行時的入口點,初始入口點必須位于映像文件運行時入口點,而它的加載時地址和運行時地址一致(稱為固定域)。可以通過-entry指定映像文件的初始入口點。 普通入口點:用ENTRY偽操作定義在程序中,一般為中斷服務程序的入口點。
4.scatter文件中包含的信息加載時域描述、運行時域描述、輸入段描述、輸入段選擇符;加載時域包括:名稱、起始地址、屬性、最大尺寸和一個運行時域;運行時域包括:名稱、起始地址、屬性、最大尺寸和一個輸入段集合;輸入段選擇符描述了輸入段名稱或屬性的匹配方式。 輸入段屬性:RO-CODE/CODE、RO_DATA/CONST、RO/TEXT包括前兩項、RW_DATARW/DATA(RW_CODE+RW_DATA)、BSS、ZI;FIRSTLAST來指定運行時域的開頭結尾,.ANY可以根據實際情況安排到合適的運行時域。 可以使用FIXED屬性將域放置在ROM中固定位置,加載時域和固定時域即相同。
拓展知識
1.程序斷點斷點可以分為:軟件斷點和硬件斷點,軟件斷點可以相應地址插入相應的指令實現,而硬件斷點必須要需要相應硬件支持才能實現。
2.鏈接庫的概念鏈接庫分為:靜態鏈接庫和動態鏈接庫,而動態鏈接庫又分為加載時動態鏈接庫和運行時動態鏈接庫;其差別:靜態鏈接庫的使用內容包含在生成的目標代碼中,加載時動態鏈接庫是程序載入內存時知道相應的動態鏈接庫調用內容同時調入內存中,而運行時動態鏈接庫只有在運行到需要調用時才調入使用。
3.JTAGJTAG仿真器也稱為JTAG調試器,是通過ARM芯片的JTAG邊界掃描口進行調試的設備。JTAG仿真器比較便宜,連接比較方便,通過現有的JTAG邊界掃描口與 ARM CPU 核通信,屬于完全非插入式(即不使用片上資源)調試,它無需目標存儲器,不占用目標系統的任何端口,而這些是駐留監控軟件所必需的。 另外,由于JTAG調試的目標程序是在目標板上執行,仿真更接近于目標硬件,因此,許多接口問題,如高頻操作限制、AC和DC參數不匹配,電線長度的限制等被最小化了。使用集成開發環境配合JTAG仿真器進行開發是目前采用最多的一種調試方式。
責任編輯:xj
原文標題:ARM代碼編譯、鏈接調試過程
文章出處:【微信公眾號:玩轉單片機】歡迎添加關注!文章轉載請注明出處。
-
ARM
+關注
關注
135文章
9552瀏覽量
391857 -
源代碼編譯
+關注
關注
0文章
2瀏覽量
5601
原文標題:ARM代碼編譯、鏈接調試過程
文章出處:【微信號:mcu168,微信公眾號:硬件攻城獅】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
是德科技與三星攜手英偉達展示端到端AI-RAN驗證工作流程
虛幻引擎5在建筑可視化中的應用:趨勢、挑戰與基于Perforce P4的工作流程

一張圖看懂遠動通信裝置的工作流程

芯片ATE測試詳解:揭秘芯片測試機臺的工作流程

強強合作 西門子與日月光合作開發 VIPack 先進封裝平臺工作流程

ADI Power Studio工作流程與工具概述
恩智浦i.MX RT1180跨界MCU驅動EtherCAT的工作流程
為什么RT Thread Studio 鏈接器無法正確讀取鏈接文件?
在IAR Arm開發工具鏈中--function_sections編譯選項的使用

飛凌嵌入式ElfBoard ELF 1板卡-uboot編譯鏈接文件uboot.lds
非技術人員如何用n8n + DeepSeek打造AI自動化工作流?
使用智能工具簡化向Arm平臺的遷移過程




 工商網監
工商網監
評論