 理想汽車公開自動駕駛仿真場景生成方法專利
理想汽車公開自動駕駛仿真場景生成方法專利

自動駕駛是當下汽車行業最為前沿的技術,也是人工智能的主要應用場景之一。無論是美國、中國、歐盟還是日本、韓國,或者是谷歌、百度、福特、通用、寶馬、特斯拉,都在加快在汽車自動駕駛領域的布局。現在,企查查信息顯示,理想汽車關聯企業正在申請自動駕駛相關專利。
理想汽車關聯企業申請自動駕駛相關專利
理想汽車關聯企業北京車和家信息技術有限公司于12月11日公開“一種自動駕駛仿真場景生成方法及裝置”專利信息,專利公開號為CN112069643A,摘要為本公開的實施例公開了一種自動駕駛仿真場景生成方法及裝置,涉及數據處理技術領域,主要目的在于使自動駕駛仿真場景更接近于真實駕駛情況。
北京車和家信息技術有限公司
企查查信息顯示,北京車和家信息技術有限公司成立于2015年,法定代表人是李想,該公司致力于打造全新智能電動交通工具,改變用戶傳統的出行體驗。2018年10月,車和家推出智能電動車品牌理想智造和首款產品理想智造ONE。
責任編輯:pj
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
數據
+關注
關注
8文章
7335瀏覽量
94769 -
人工智能
+關注
關注
1817文章
50098瀏覽量
265372 -
自動駕駛
+關注
關注
793文章
14882瀏覽量
179854
發布評論請先 登錄
相關推薦
熱點推薦
賽目科技Sim Pro賦能自動駕駛算法評價體系構建
2025年1月28日,國家標準GB/T 47025-2026《智能網聯汽車 自動駕駛功能仿真試驗方法及要求》(以下簡稱“仿真國標”)正式發布

自動駕駛汽車如何實現自動駕駛
人類駕駛員而言是非常直觀且有效的指令,但對于自動駕駛汽車來說,則意味著需要一套極其復雜的感知、理解與決策鏈路。 自動駕駛如何看清文字? 自動駕駛

自動駕駛仿真測試場景生成方法:從技術突破到工程落地的全維度解析
在自動駕駛技術邁向 L4 及更高階別的進程中,仿真測試已成為算法迭代、功能驗證與安全合規的核心支撐。其中,測試場景的真實性、多樣性與可擴展性直接決定了仿真測試的有效性 —— 傳統
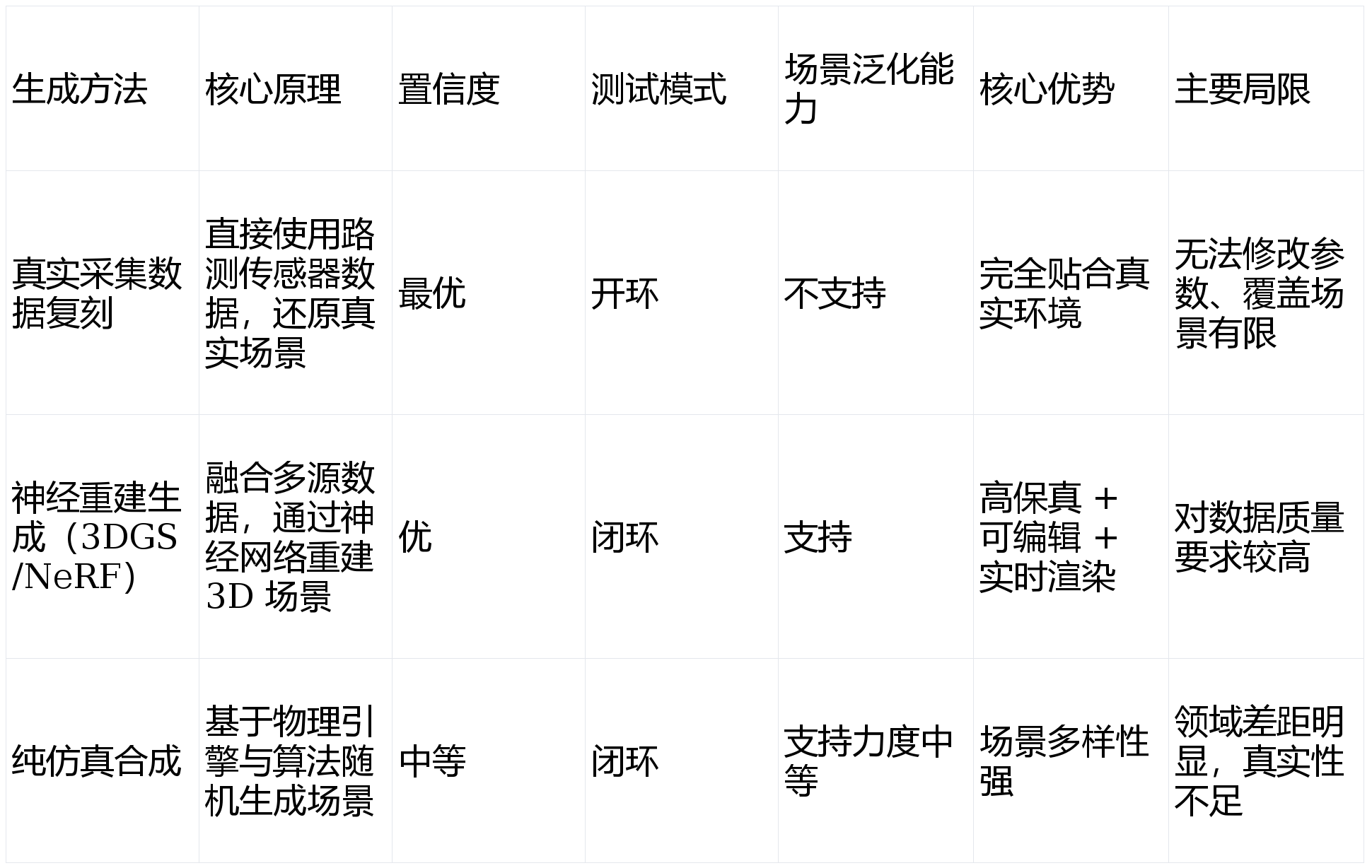
自動駕駛場景生成方法及優選方案:康謀aiSim 3DGS方案重塑行業標準
在自動駕駛技術飛速發展的當下,仿真測試的重要性愈發凸顯,而 自動駕駛場景生成 作為仿真測試的核心


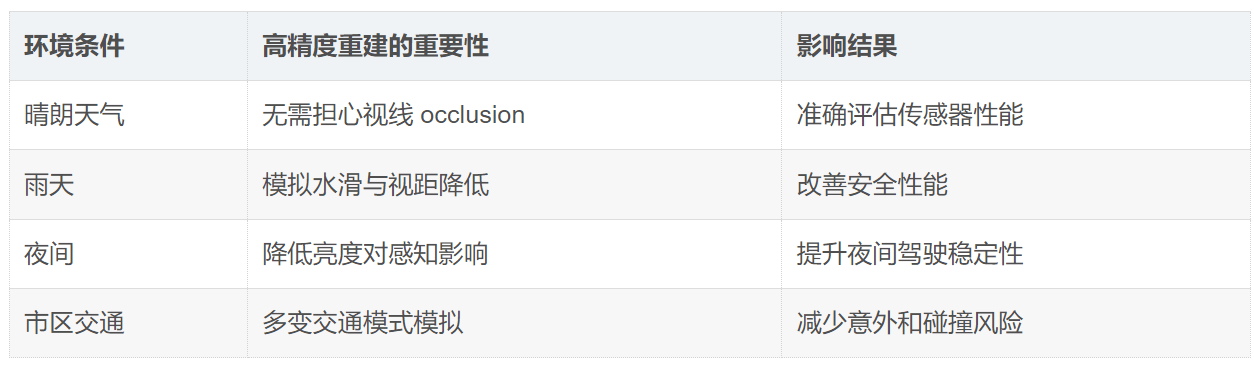
如何選擇適合的智駕仿真工具進行場景生成和測試?
在自動駕駛技術日益發展的背景下,選擇合適的智駕仿真工具進行場景生成和測試顯得尤為重要。該工具不僅需要支持高精度的場景重建,還需滿足多種環境條

自動駕駛汽車如何處理“鬼探頭”式的邊緣場景?
[首發于智駕最前沿微信公眾號]自動駕駛遇到“鬼探頭”式的邊緣場景時應該如何處理?其實對于自動駕駛汽車來說,無論是常規場景,還是邊緣

生成式 AI 重塑自動駕駛仿真:4D 場景生成技術的突破與實踐
生成式AI驅動的4D場景技術正解決傳統方法效率低、覆蓋不足等痛點,如何通過NeRF、3D高斯潑濺等技術實現高保真動態建模?高效生成極端天氣等長尾場景

新能源車軟件單元測試深度解析:自動駕駛系統視角
。
?自動駕駛軟件的特殊性?
? 感知層: ?激光雷達、攝像頭等傳感器數據處理算法的單元測試需覆蓋極端場景。例如,激光雷達點云濾波算法在雨雪天氣下的噪聲抑制能力需通過邊界測試驗證。某廠商曾在測試中遺漏
發表于 05-12 15:59
一種多模態駕駛場景生成框架UMGen介紹
端到端自動駕駛技術的快速發展對閉環仿真器提出了迫切需求,而生成式模型為其提供了一種有效的技術架構。然而,現有的駕駛場景

理想汽車推出全新自動駕駛架構
2025年3月18日,理想汽車自動駕駛技術研發負責人賈鵬在NVIDIA GTC 2025發表主題演講《VLA:邁向自動駕駛物理智能體的關鍵一步》,分享了
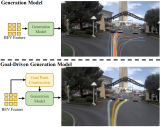
端到端自動駕駛多模態軌跡生成方法GoalFlow解析
自動駕駛軌跡規劃往往采用直接回歸軌跡的方法,這種方式雖在測試中能取得不錯的性能,可直接輸出當前場景下最有可能的軌跡或控制,但它難以對自動駕駛場景




 工商網監
工商網監
評論