") 語義分割算法系統(tǒng)介紹
語義分割算法系統(tǒng)介紹

圖像語義分割是圖像處理和是機(jī)器視覺技術(shù)中關(guān)于圖像理解的重要任務(wù)。語義分割即是對圖像中每一個像素點進(jìn)行分類,確定每個點的類別,從而進(jìn)行區(qū)域劃分,為了能夠幫助大家更好的了解語義分割領(lǐng)域,我們精選知乎文章。作者Xavier CHEN針對語義分割進(jìn)行系統(tǒng)的介紹,從原理解析到算法發(fā)展總結(jié),文章思路清晰,總結(jié)全面,推薦大家閱讀。
本文作者為Xavier CHEN,畢業(yè)于浙江大學(xué),在知乎持續(xù)分享前沿文章。
01
前言
之前做了一個語義分割的綜述報告,現(xiàn)在把報告總結(jié)成文章。這篇文章將分為三個部分:
1.語義分割基本介紹:明確語義分割解決的是什么問題。
2.從FCN到Deeplab v3+:解讀語義分割模型的發(fā)展,常用方法與技巧
3.代碼實戰(zhàn)中需要注意的問題。
02
語義分割基本介紹
2.1 概念
語義分割(semantic segmentation) : 就是按照“語義”給圖像上目標(biāo)類別中的每一點打一個標(biāo)簽,使得不同種類的東西在圖像上被區(qū)分開來。可以理解成像素級別的分類任務(wù)。
輸入:(H*W*3)就是正常的圖片
輸出:( H*W*class )可以看為圖片上每個點的one-hot表示,每一個channel對應(yīng)一個class,對每一個pixel位置,都有class數(shù)目 個channel,每個channel的值對應(yīng)那個像素屬于該class的預(yù)測概率。
figure1
2.2評價準(zhǔn)則
1.像素精度(pixel accuracy ):每一類像素正確分類的個數(shù)/ 每一類像素的實際個數(shù)。
2.均像素精度(mean pixel accuracy ):每一類像素的精度的平均值。
3.平均交并比(Mean Intersection over Union):求出每一類的IOU取平均值。IOU指的是兩塊區(qū)域相交的部分/兩個部分的并集,如figure2中 綠色部分/總面積。
4.權(quán)頻交并比(Frequency Weight Intersection over Union):每一類出現(xiàn)的頻率作為權(quán)重
figure2
03
從FCN 到Deeplab V3+
語義分割的原理和常用技巧
3.1 FCN
FCN是語義分割的開山之作,主要特色有兩點:
1.全連接層換成卷積層
2.不同尺度的信息融合FCN-8S,16s,32s
看詳細(xì)講解 推薦:
https://zhuanlan.zhihu.com/p/30195134
3.1.1 全連接層換成卷積層
figure3
以Alexnet的拓?fù)浣Y(jié)構(gòu)為例
原本的結(jié)構(gòu):224大小的圖片經(jīng)過一系列卷積,得到大小為1/32 = 7的feature map,經(jīng)過三層全連接層,得到基于FC的分布式表示。
我們把三層全連接層全都換成卷積層,卷積核的大小和個數(shù)如下圖中間行所示,我們?nèi)サ袅巳B接層,但是得到了另外一種基于不同channel的分布式表示:Heatmap
舉一個例子,我們有一個大小為384的圖片,經(jīng)過替換了FC的Alexnet,得到的是6*6*1000的Heatmap,相當(dāng)于原來的Alexnet 以stride = 32在輸入圖片上滑動,經(jīng)過上采樣之后,就可以得到粗略的分割結(jié)果。
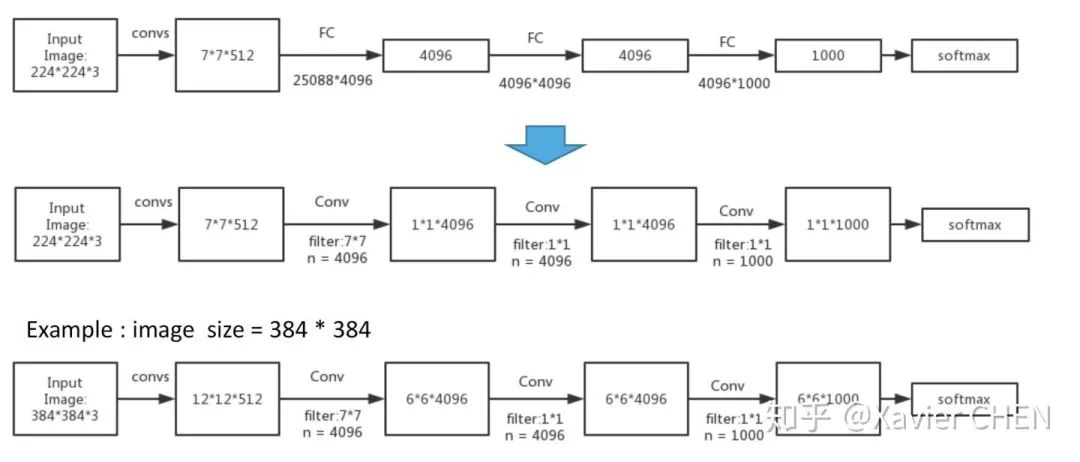
figure4
3.1.2 不同尺度的信息融合
就像剛剛舉的Alexnet的例子,對于任何的分類神經(jīng)網(wǎng)絡(luò)我們都可以用卷積層替換FC層,只是換了一種信息的分布式表示。如果我們直接把Heatmap上采樣,就得到FCN-32s。如下圖
figure5
但是我們知道,隨著一次次的池化,雖然感受野不斷增大,語義信息不斷增強(qiáng)。但是池化造成了像素位置信息的丟失:直觀舉例,1/32大小的Heatmap上采樣到原圖之后,在Heatmap上如果偏移一個像素,在原圖就偏移32個像素,這是不能容忍的。
見figure6,前面的層雖然語義信息較少,但是位置信息較多,作者就把1/8 1/16 1/32的三個層的輸出融合起來了。先把1/32的輸出上采樣到1/16,和Pool4的輸出做elementwose addition , 結(jié)果再上采樣到1/8,和Pool3的輸出各個元素相加。得到1/8的結(jié)果,上采樣8倍,求Loss。
figure6
3.2 U-net
figure7
U-net用于解決小樣本的簡單問題分割,比如醫(yī)療影片的分割。它遵循的基本原理與FCN一樣:
1.Encoder-Decoder結(jié)構(gòu):前半部分為多層卷積池化,不斷擴(kuò)大感受野,用于提取特征。后半部分上采樣回復(fù)圖片尺寸。
2.更豐富的信息融合:如灰色剪頭,更多的前后層之間的信息融合。這里是把前面層的輸出和后面層concat(串聯(lián))到一起,區(qū)別于FCN的逐元素加和。不同F(xiàn)eature map串聯(lián)到一起后,后面接卷積層,可以讓卷積核在channel上自己做出選擇。注意的是,在串聯(lián)之前,需要把前層的feature map crop到和后層一樣的大小。
3.3 SegNet
figure 8
在結(jié)構(gòu)上看,SegNet和U-net其實大同小異,都是編碼-解碼結(jié)果。區(qū)別在意,SegNet沒有直接融合不同尺度的層的信息,為了解決為止信息丟失的問題,SegNet使用了帶有坐標(biāo)(index)的池化。如下圖所示,在Max pooling時,選擇最大像素的同時,記錄下該像素在Feature map的位置(左圖)。在反池化的時候,根據(jù)記錄的坐標(biāo),把最大值復(fù)原到原來對應(yīng)的位置,其他的位置補(bǔ)零(右圖)。后面的卷積可以把0的元素給填上。這樣一來,就解決了由于多次池化造成的位置信息的丟失。
figure 9
3.4 Deeplab V1
figure10
這篇論文不同于之前的思路,他的特色有兩點:
1.由于Pooling-Upsample會丟失位置信息而且多層上下采樣開銷較大,把控制感受野大小的方法化成:帶孔卷積(Atrous conv)
2.加入CRF(條件隨機(jī)場),利用像素之間的關(guān)連信息:相鄰的像素,或者顏色相近的像素有更大的可能屬于同一個class。
3.4.1 Atrous Conv
如右下圖片所示,一個擴(kuò)張率為2的帶孔卷積接在一個擴(kuò)張率為1的正常卷積后面,可以達(dá)到大小為7的感受野,但是輸出的大小并沒有減小,參數(shù)量也沒有增大。
figure 11
3.4.2 條件隨機(jī)場CRF
figure 12
3.5 PSPnet
figure13
原理都大同小異,前面的不同level的信息融合都是融合淺層和后層的Feature Map,因為后層的感受野大,語義特征強(qiáng),淺層的感受野小,局部特征明顯且位置信息豐富。
PSPnet則使用了空間金字塔池化,得到一組感受野大小不同的feature map,將這些感受野不同的map concat到一起,完成多層次的語義特征融合。
3.6 Deeplab V2
figure 14
Deeplab v2在v1的基礎(chǔ)上做出了改進(jìn),引入了ASPP(Atrous Spatial Pyramid Pooling)的結(jié)構(gòu),如上圖所示。我們注意到,Deeplab v1使用帶孔卷積擴(kuò)大感受野之后,沒有融合不同層之間的信息。
ASPP層就是為了融合不同級別的語義信息:選擇不同擴(kuò)張率的帶孔卷積去處理Feature Map,由于感受野不同,得到的信息的Level也就不同,ASPP層把這些不同層級的feature map concat到一起,進(jìn)行信息融合。
3.7 Deeplab v3
Deeplab v3在原有基礎(chǔ)上的改動是:
1.改進(jìn)了ASPP模塊
2.引入Resnet Block
3.丟棄CRF
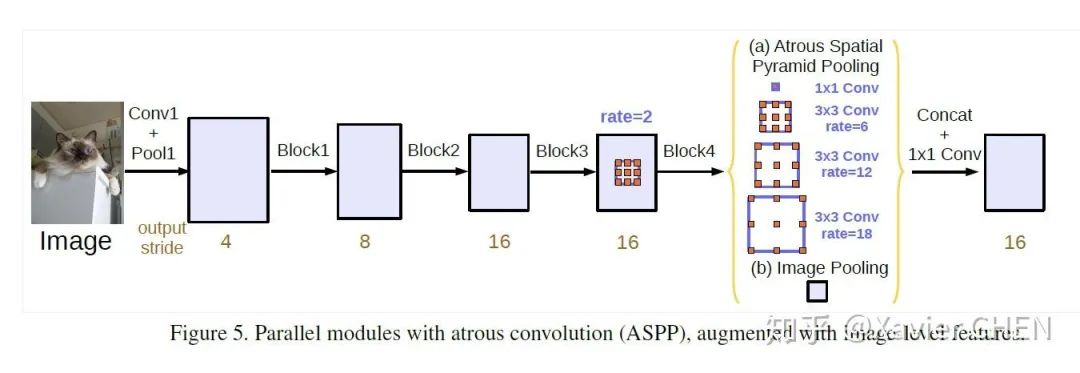
figure15
新的ASPP模塊:
1.加入了Batch Norm
2.加入特征的全局平均池化(在擴(kuò)張率很大的情況下,有效權(quán)重會變小)。如圖14中的(b)Image Pooling就是全局平均池化,它的加入是對全局特征的強(qiáng)調(diào)、加強(qiáng)。
在舊的ASPP模塊中:我們以為在擴(kuò)張率足夠大的時候,感受野足夠大,所以獲得的特征傾向于全局特征。但實際上,擴(kuò)張率過大的情況下,Atrous conv出現(xiàn)了“權(quán)值退化”的問題,感受野過大,都已近擴(kuò)展到了圖像外面,大多數(shù)的權(quán)重都和圖像外圍的zero padding進(jìn)行了點乘,這樣并沒有獲取圖像中的信息。有效的權(quán)值個數(shù)很少,往往就是1。于是我們加了全局平均池化,強(qiáng)行利用全局信息。
3.8 Deeplab v3+
figure16
可以看成是把Deeplab v3作為編碼器(上半部分)。后面再進(jìn)行解碼,并且在解碼的過程中在此運(yùn)用了不同層級特征的融合。
此外,在encoder部分加入了Xception的結(jié)構(gòu)減少了參數(shù)量,提高運(yùn)行速遞。關(guān)于Xception如何減少參數(shù)量,提高速度。建議閱讀論文 : Mobilenet
https://arxiv.org/pdf/1704.04861.pdf
3.9 套路總結(jié)
看完這么多論文,會發(fā)現(xiàn)他們的方法都差不多,總結(jié)為一下幾點。在自己設(shè)計語義分割模型的時候,遵循一下規(guī)則,都是可以漲點的。但是要結(jié)合自己的項目要求,選擇合適的方法。
1.全卷積網(wǎng)絡(luò),滑窗的形式
2.感受野的控制:Pooling+Upsample => Atrous convolution
3.不同Level的特征融合:統(tǒng)一尺寸之后Add / Concat+Conv, SPP, ASPP…
4.考慮相鄰像素之間的關(guān)系:CRF
5.在條件允許的情況下,圖像越大越好。
6.分割某一個特定的類別,可以考慮使用先驗知識+ 對結(jié)果進(jìn)行圖像形態(tài)學(xué)處理
7.此外還有一些其他的研究思路:實時語義分割,視頻語義分割
責(zé)任編輯:xj
原文標(biāo)題:一文速覽!語義分割算法盤點
文章出處:【微信公眾號:新機(jī)器視覺】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
-
算法
+關(guān)注
關(guān)注
23文章
4784瀏覽量
98038 -
FC
+關(guān)注
關(guān)注
1文章
84瀏覽量
42813 -
卷積
+關(guān)注
關(guān)注
0文章
95瀏覽量
19006
原文標(biāo)題:一文速覽!語義分割算法盤點
文章出處:【微信號:vision263com,微信公眾號:新機(jī)器視覺】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
RDMA設(shè)計46:RoCE v2原語功能:單邊語義
AI功能(SC171開發(fā)套件V3)2026版
SAM(通用圖像分割基礎(chǔ)模型)丨基于BM1684X模型部署指南

【NPU實戰(zhàn)】在迅為RK3588上玩轉(zhuǎn)YOLOv8:目標(biāo)檢測與語義分割一站式部署指南

AES加解密算法邏輯實現(xiàn)及其在蜂鳥E203SoC上的應(yīng)用介紹
基于E203 RISC-V的音頻信號處理系統(tǒng) -ANC算法簡介
國密系列算法簡介及SM4算法原理介紹
微店關(guān)鍵詞搜索接口核心突破:動態(tài)權(quán)重算法與語義引擎的實戰(zhàn)落地
手機(jī)板 layout 走線跨分割問題
基于黃金分割搜索法的IPMSM最大轉(zhuǎn)矩電流比控制
北京迅為itop-3588開發(fā)板NPU例程測試deeplabv3 語義分割

【正點原子STM32MP257開發(fā)板試用】基于 DeepLab 模型的圖像分割

【「# ROS 2智能機(jī)器人開發(fā)實踐」閱讀體驗】視覺實現(xiàn)的基礎(chǔ)算法的應(yīng)用
破解透明物體抓取難題,地瓜機(jī)器人 CASIA 推出幾何和語義融合的單目抓取方案|ICRA 2025



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論