 MLX90316 三軸旋轉位置傳感器的前端校準
MLX90316 三軸旋轉位置傳感器的前端校準

本應用筆記介紹了 MLX90316 三軸旋轉位置傳感器在設備執行角位置提取之前的前端校準。該文件還描述了動態偏移消除機制、靈敏度失配、正交性、信號非線性和系統的整體精度。
描述
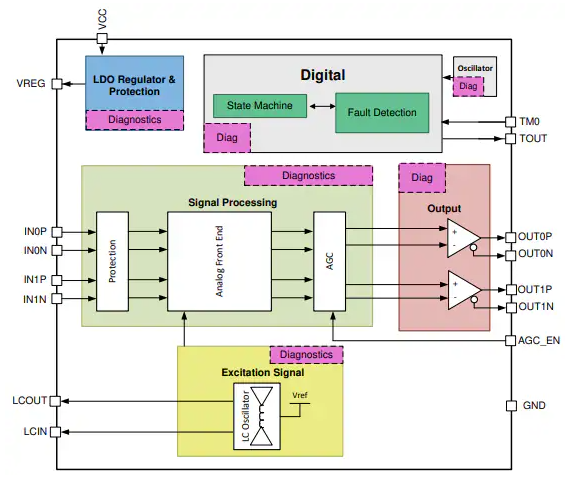
如圖 1 和圖 2 所示,如果磁鐵(徑向磁化)在 MLX90316 上方旋轉,則三軸霍爾板提供兩個正交信號 Vx 和 Vy(分別用于沿 X 軸和 Y 軸的磁通密度)。
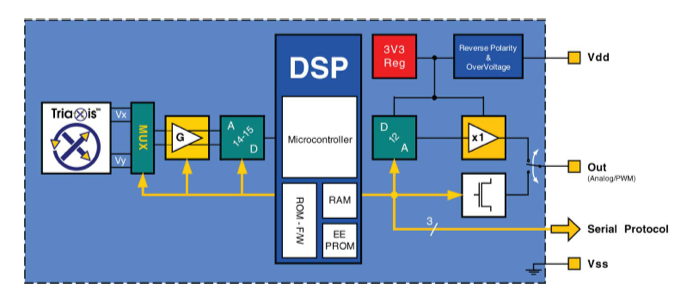
這些霍爾信號通過采用經典偏移消除技術的全差分模擬鏈進行處理。調節后的模擬信號通過 ADC 進行轉換,并提供給 DSP 模塊進行進一步處理。
抵消
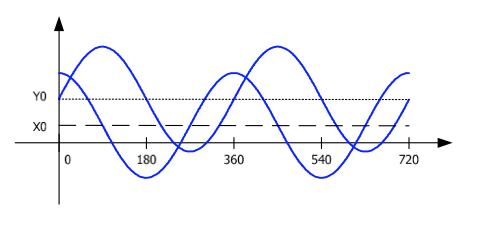
雖然片上動態偏移消除機制(霍爾板正交旋轉和斬波穩定放大器),模擬信號可能會顯示殘余偏移。正弦信號上此偏移的表示如圖 3 所示,其中 X0 和 Y0 偏移均被放大(X0 和 Y0 是模擬電平 V_x,0 和 V_y,0 的數字表示)。偏移值通常非常小且取決于溫度。
靈敏度不匹配
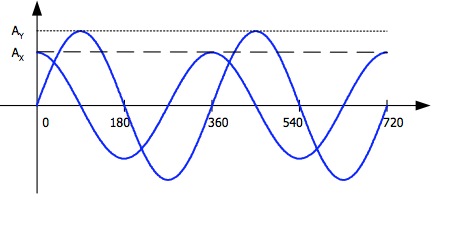
盡管兩個霍爾信號(V_x 和 V_y)均由匹配的霍爾板生成并通過公共多路復用放大鏈放大,但這兩個信號可能會顯示出殘余的幅度差異。這種不匹配的兩個主要原因是 IMC 相對于霍爾板星座的非完美對齊以及不同三軸霍爾板靈敏度之間的差異。幅度失配的圖示如圖 4 所示。
正交性
正交誤差,也稱為正交誤差,是正弦和余弦信號之間的相位誤差。這意味著這兩個信號的相位分離不完全是 90 度。傳感器的 DSP 將不斷調整正弦與余弦的關系,以獲得 90 度的恒定相位分離。
信號非線性
在正常操作中,信號非線性可以忽略不計。它的簽名很容易識別;超過 360 度的四個周期。因此,它可以解決非線性的主要來源,即磁飽和(IMC 位置上的應用場大于 70mT)。
編輯:hfy
-
dsp
+關注
關注
561文章
8244瀏覽量
366613 -
adc
+關注
關注
100文章
7511瀏覽量
555931 -
模擬信號
+關注
關注
8文章
1232瀏覽量
54666 -
位置傳感器
+關注
關注
3文章
306瀏覽量
28633
發布評論請先 登錄
探索LDC5072-Q1:電感式位置傳感器前端IC的卓越性能與應用
開啟電子革命:HRPM霍爾效應旋轉位置傳感器深度解析
探索HRPS霍爾效應旋轉位置傳感器:工業與交通領域的理想之選
電子工程師必看:PSTI感應式通軸電機轉子位置傳感器解析
探索 PSCR - 360 高精度非接觸式旋轉傳感器的卓越性能
LDC5072-Q1電感式位置傳感器前端芯片技術解析與應用指南
使用位置傳感器進行無刷電機控制

德州儀器LDC5071-Q1電感式位置傳感器技術解析
博士學位論文-永磁同步電機脈振高頻信號注入無位置傳感器技術研究
FUTEK TRS150旋轉扭矩傳感器概述
Melexis霍爾效應磁位置傳感芯片MLX90427介紹
工業傳感器校準:步驟、技巧與維護全解析
磁旋轉編碼器在永磁同步電機位置測量中的應用(可下載)
轉子位置傳感器之霍爾磁敏傳感器介紹(可下載)
磁性位置編碼器傳感器SME150產品概述



 工商網監
工商網監
評論