") 機(jī)械手控制系統(tǒng)是什么,它的功能特點(diǎn)有哪些
機(jī)械手控制系統(tǒng)是什么,它的功能特點(diǎn)有哪些

CRT工業(yè)運(yùn)動(dòng)控制系統(tǒng)DMC600M系列,其硬件結(jié)構(gòu)基于高性能 DSP 為控制核心、FPGA 協(xié)處理,插補(bǔ)算法、脈沖信號(hào)產(chǎn)生及直線曲線加減速控制、I/O 信號(hào)的檢測處理;運(yùn)用實(shí)時(shí)多任務(wù)控制技術(shù)和硬件插補(bǔ)技術(shù) ,工作時(shí)穩(wěn)定性高;可以使用高細(xì)分驅(qū)動(dòng)器 ,加工精度高、運(yùn)行平穩(wěn);直線圓弧螺旋插補(bǔ)并其他軸聯(lián)動(dòng)。
在工業(yè)控制領(lǐng)域,示教系統(tǒng)是一種通過示教編程存儲(chǔ)運(yùn)動(dòng)動(dòng)作,然后將存儲(chǔ)的動(dòng)作重現(xiàn)出來的一種非常流行的人機(jī)交互式的控制系統(tǒng)。一個(gè)完整的示教系統(tǒng)由機(jī)械結(jié)構(gòu)部分,驅(qū)動(dòng)部分,控制系統(tǒng),示教盒等部分組成。一般而言示教系統(tǒng),仿形系統(tǒng),教導(dǎo)式系統(tǒng)的含義大致相同。對(duì)于一個(gè)示教系統(tǒng),除了能示教,重現(xiàn)軌跡外,還應(yīng)該具有以下功能特點(diǎn):
1. 能保存圖形,掉電后數(shù)據(jù)不會(huì)丟失。2. 操作簡單,功能多樣的示教編輯功能,能編輯加工復(fù)雜圖形。3. 系統(tǒng)有較高的加工生產(chǎn)效率。4. 系統(tǒng)有足夠的記憶空間滿足多種產(chǎn)品和規(guī)格的生產(chǎn)需求。
根據(jù)以上要求,本系統(tǒng)的功能特點(diǎn)簡單說明如下:能保存圖形,掉電后不會(huì)丟失,操作簡單,多種定位及高級(jí)功能,能方便高效的編輯圖形。控制器和手持盒兼容性強(qiáng),可獨(dú)立工作,多達(dá)512個(gè)圖形存儲(chǔ),能滿足加工不同工件的要求。
對(duì)于本系統(tǒng),示教的基本步驟如下:
1. 預(yù)先規(guī)劃需要運(yùn)動(dòng)的軌跡(包括移動(dòng)、輸出延時(shí)、檢測跳轉(zhuǎn)等動(dòng)作)。2. 根據(jù)第一步的設(shè)想編輯出加工的工藝程序,注意,此時(shí)的參數(shù)都是待定的。3. 通過手持盒系統(tǒng)中的示教編輯功能,通過手動(dòng)移動(dòng)或坐標(biāo)輸入將參考點(diǎn)移動(dòng)到目標(biāo)位置,記錄這些點(diǎn)的位置信息以及相關(guān)參數(shù)。一系列的點(diǎn)組合起來即為所規(guī)劃的加工軌跡。4. 設(shè)置加工相關(guān)的運(yùn)行參數(shù)(各軸速度、系數(shù),M 參數(shù),S 參數(shù)等)。5. 運(yùn)行指定編號(hào)的圖形。即可將編輯的圖形通過控制系統(tǒng)重現(xiàn),達(dá)到一次示教即可進(jìn)行多次自動(dòng)加工的目的。
一、移動(dòng)例程
例程要求:如圖 1 所示:(1)移動(dòng)到“點(diǎn) 1”,打開輸出“OT0”,延時(shí) 2000ms,關(guān)閉輸 出“OT0”;(2)移動(dòng)到“點(diǎn) 2”,打開輸出“OT1”,延時(shí) 2000ms,關(guān)閉輸出“OT1”;(3)移動(dòng)到“點(diǎn) 3”,打開輸出“OT2”,延時(shí) 2000ms,關(guān)閉輸出“OT2”。 具體的任務(wù)流程參考規(guī)格說明書。
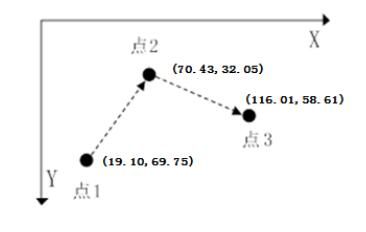
圖1
二、組合例程
例程要求:如圖 2所示:圖中包含三個(gè)點(diǎn)和一條線,在點(diǎn)的位置需要打開 OT0 并且延時(shí)1000ms,然后關(guān)閉,在直線位置需要 OT0 一直打開,直線段的速度是設(shè)定速度的 50%,直線走完的時(shí)候 OT0 關(guān)閉,假定需要按照?qǐng)D中箭頭方向運(yùn)行三次后停止。具體的任務(wù)流程參考規(guī)格說明書。
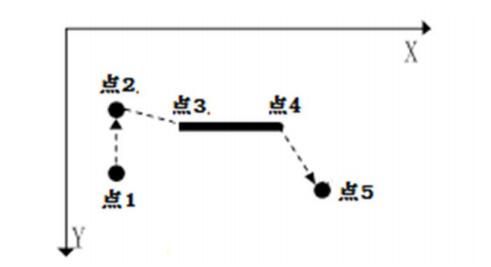
圖2
三、取放料例程
例程要求:如圖 3所示:圖中立方體為障礙物,加工點(diǎn)不能與之觸碰,P1 點(diǎn)為取料點(diǎn),P2 點(diǎn)位放料點(diǎn),首先移動(dòng)到 P1 點(diǎn),取料(OT1 為 1),延時(shí) 1000ms,檢測是否取到料(IN16), 若沒有取到料(IN16 有效)發(fā)出報(bào)警信號(hào)(OT3),直到解除報(bào)警(IN17 有效),取到料后抬高到安全位(P3),移動(dòng)到 P4,再移動(dòng)到放料點(diǎn) P2,放料(OT1 為 0),移動(dòng)到 P4,移動(dòng)到 P3,檢測是否還要取料(IN18),如果 IN18 有效,移動(dòng)到 P1 重復(fù)之前動(dòng)作,如果 IN18 無效,回原點(diǎn) P5。具體的任務(wù)流程參考規(guī)格說明書。
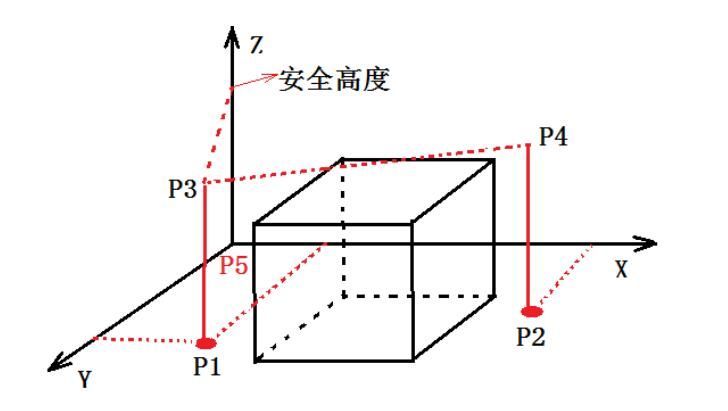
圖3
fqj
-
控制系統(tǒng)
+關(guān)注
關(guān)注
41文章
6955瀏覽量
114101 -
機(jī)械手
+關(guān)注
關(guān)注
7文章
358瀏覽量
31466
發(fā)布評(píng)論請(qǐng)先 登錄
適配FOUP載具的晶圓搬運(yùn)機(jī)械手,哪些型號(hào)維護(hù)更便捷?
XYZR結(jié)構(gòu)機(jī)械手柔性供料運(yùn)行視頻#正運(yùn)動(dòng)技術(shù) #運(yùn)動(dòng)控制器 #正運(yùn)動(dòng) #運(yùn)動(dòng)控制系統(tǒng)方案 #運(yùn)動(dòng)控制
DELTA機(jī)械手柔性供料運(yùn)行視頻#正運(yùn)動(dòng)技術(shù) #正運(yùn)動(dòng) #運(yùn)動(dòng)控制器 #運(yùn)動(dòng)控制 #運(yùn)動(dòng)控制系統(tǒng)方案
SCARA機(jī)械手柔性供料運(yùn)行視頻#正運(yùn)動(dòng)技術(shù) #運(yùn)動(dòng)控制器 #運(yùn)動(dòng)控制系統(tǒng) #正運(yùn)動(dòng) #運(yùn)動(dòng)控制

FOSAN 富捷科技:揭秘掃地機(jī)器人 “長手” 背后的硬核半導(dǎo)體支撐

基于BLDC手術(shù)刀控制系統(tǒng)的程序設(shè)計(jì)
Amazing Hand:一個(gè)開源的3D打印仿真機(jī)械手項(xiàng)目



運(yùn)動(dòng)控制模塊:Delta機(jī)械手柔性上下料開發(fā)零門檻!

桁架機(jī)械手直線模組滑臺(tái) 五大核心技術(shù)打造無人車間新標(biāo)桿
profinet轉(zhuǎn)ethercat網(wǎng)關(guān)的自動(dòng)上料機(jī)械手集成案例




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論