") 以交流伺服為例探討伺服傳動控制系統(tǒng)技術(shù)
以交流伺服為例探討伺服傳動控制系統(tǒng)技術(shù)

伺服其實是一種用于實現(xiàn)運動控制的動力傳動技術(shù),同時提到了其可能會涉及到的一些產(chǎn)品。然而,產(chǎn)線設(shè)備上的高性能運動控制功能,光靠這些傳動產(chǎn)品顯然是無法完成和實現(xiàn)的,必須將它們整合在一起,并有機的融入到設(shè)備的自動化系統(tǒng)中去,才能發(fā)揮其應(yīng)有的作用。
■考慮到交流變頻伺服已經(jīng)在目前的工業(yè)應(yīng)用中成為了運控領(lǐng)域的絕對主力,接下來關(guān)于伺服技術(shù)的討論中,將主要以交流伺服作為重點。
PicSource:YASKAWA | ∑ - 7
交流變頻伺服,是一種以交流變頻作為動力傳動方式的伺服技術(shù),其核心自然就是伺服驅(qū)動器和伺服電機了。伺服驅(qū)動器基于控制端指令,將電源側(cè)標準動力輸入轉(zhuǎn)換成伺服電機所需的可調(diào)節(jié)交流動力電源;伺服電機,則會將這個動力電源再進一步轉(zhuǎn)換為機械動力輸出,從而驅(qū)動負載完成特定的運動控制功能。
PicSource:Kollmorgen | AKD
這樣看來,要在設(shè)備的自動化系統(tǒng)中引入交流伺服技術(shù),至少得在三個方面與其進行對接與融合:
■控制平臺
■電力驅(qū)動
■機械傳動
我們先來聊聊伺服系統(tǒng)的控制平臺。
PicSource:SIMATIC
在談到伺服與變頻的區(qū)別時,我們曾經(jīng)說過,為了能夠達到較高的應(yīng)用控制精度,伺服驅(qū)動與控制平臺之間指令更新的時間刻度必須要精確到微妙級,它們須以極為確定的時間周期進行運控數(shù)據(jù)的實時交互。因此,長期以來,設(shè)備運控平臺在接入伺服產(chǎn)品時,都需要使用專屬的運控數(shù)據(jù)端口,例如:高頻脈沖串端口或?qū)S眠\控總線端口。
PicSource:Pananonic | FP X
一般來說,使用脈沖串方式控制伺服,其硬件成本是相對較低的,大部分用戶并不會太在意它對伺服的控制其實是開環(huán)的。然而與此同時,其短板也是很明顯的。一方面,運控系統(tǒng)的拓撲結(jié)構(gòu)比較單一,不夠靈活,只能是星型布局;另一方面,由于單個脈沖模塊能夠同時接入的伺服軸數(shù)十分有限,系統(tǒng)的空間占用和接線數(shù)量都會隨著其軸數(shù)的增加而變得異常龐大,這對于那些大型的伺服運控設(shè)備來說,會嚴重影響其應(yīng)用和集成的綜合體驗。

PicSource:Rockwell Automation
專用運控總線采用數(shù)字串行通訊的方式來完成控制器與伺服驅(qū)動之間的數(shù)據(jù)交互,單一端口能夠接入很多伺服軸,加之在連接方式上,它們大部分都支持多組件的跨接串聯(lián),能夠以鏈式布局構(gòu)建網(wǎng)絡(luò),這讓系統(tǒng)的拓撲結(jié)構(gòu)變得十分靈活,有助于為用戶節(jié)省大量的設(shè)備空間占用、減少線束連接,并簡化運控系統(tǒng)的應(yīng)用和集成工作。然而,彼時專屬總線運控產(chǎn)品高昂的采購成本,卻總是讓不少用戶望而卻步。以至于,一直以來,它們都被大家認為是“高端”的伺服運控產(chǎn)品。
PicSource:differencebtw
另外,由于伺服應(yīng)用在控制策略上更側(cè)重在空間和力學(xué)方面的數(shù)據(jù)計算,需要處理大量的運動學(xué)任務(wù),如:空間坐標系轉(zhuǎn)換、運動軌跡規(guī)劃與追蹤、加減速度與力矩的運算...等等,這與一般的離散、邏輯、批次、過程...等控制方式有著極大的差別。
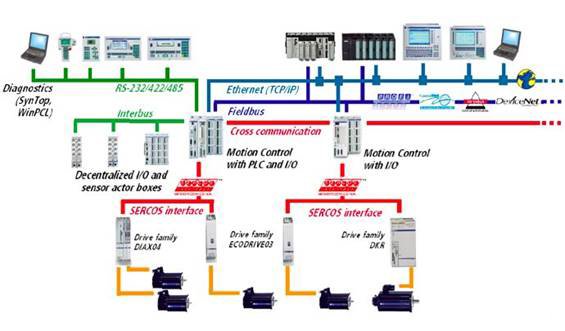
PicSource:Bosch Rexroth
加上前面所說的運控數(shù)據(jù)接口的特殊性,早些年的自動化運控設(shè)備往往都需要同時配備邏輯控制器 PLC 和專用的運動控制器 MC,去分別處理邏輯控制任務(wù)和運動控制任務(wù)。這樣的設(shè)備控制系統(tǒng),其復(fù)雜性是顯而易見的,用戶不僅要同時配置和操作兩套控制系統(tǒng),還不得不考慮二者之間大量的數(shù)據(jù)交互和運算邏輯,這讓機器的應(yīng)用成本在設(shè)計、使用和維護、甚至學(xué)習(xí)和培訓(xùn)...等各個方面都顯得非常之高。

PicSource:OMRON FA | NX1
近幾年,隨著電子半導(dǎo)體和信息通訊技術(shù)的不斷進步,設(shè)備控制器與現(xiàn)場總線產(chǎn)品的發(fā)展也開始進入到一個全新的時代。
一方面,集成運動和離散、邏輯...等控制方式的高性能多策略控制器,已經(jīng)基本成了自動化控制產(chǎn)品的主流,用戶只需要使用一種(自動化)控制器,就能夠在其設(shè)備中實現(xiàn)多種策略類型的功能任務(wù)。
PicSource:Bosch Rexroth | SERCOS for IndraDrive C
另一方面,工業(yè)以太網(wǎng)已經(jīng)基本上解決了網(wǎng)絡(luò)通訊的數(shù)據(jù)實時性和時間確定性的問題(盡管各家采用的方法有所不同),完全可以替代甚至超越上一代運控總線的應(yīng)用性能,借助這種技術(shù),用戶在其設(shè)備中只需要使用一種協(xié)議的實時通訊技術(shù),如: EtherCAT、PowerLink、ProfiNet IRT、SERCOS III.. 等,就可以將伺服傳動與通用的自動化控制集成在同一個設(shè)備網(wǎng)絡(luò)系統(tǒng)之中。
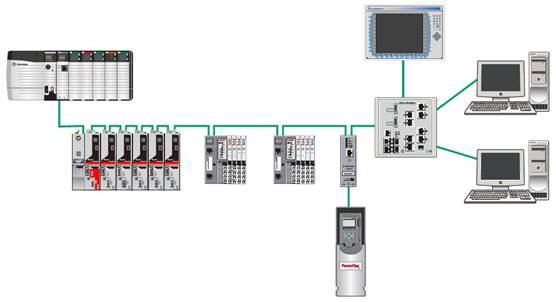
PicSource:Rockwell Automation
這樣一來,伺服運控設(shè)備的自動化架構(gòu)就變得十分簡單了,每個運控設(shè)備單元只需使用一臺自動化控制器,通過一種協(xié)議的網(wǎng)絡(luò)便能夠與其中各個伺服軸、變頻器、I/O ... 等底層自動化組件實現(xiàn)通訊連接,并完成設(shè)備的各項功能;同時,產(chǎn)線上的多個設(shè)備單元,也完全可以通過僅使用一種實時通訊協(xié)議連接到同一個網(wǎng)絡(luò)系統(tǒng)中,來實現(xiàn)它們之間的各種協(xié)同互操作,進而再共同接入到產(chǎn)線乃至整個工廠的運營管理平臺上去。
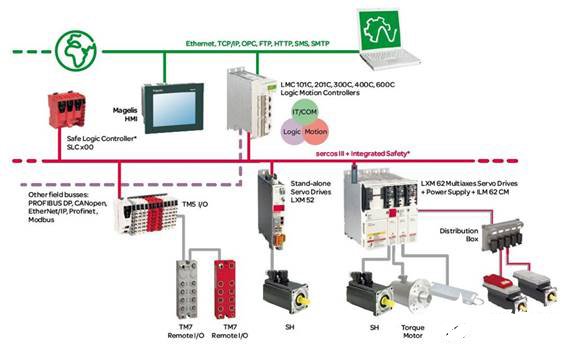
PicSource:Schneider Electric
目前,大部分自動化廠商都已經(jīng)基于自身的產(chǎn)品體系推出了其所謂的“全集成”自動化設(shè)備控制系統(tǒng)。盡管名稱各異,各個環(huán)節(jié)的技術(shù)細節(jié)也多有不同,但縱觀其系統(tǒng)架構(gòu),卻是殊途同歸,基本上都屬于我們上面所說的這種拓撲樣式。
而設(shè)備用戶能夠接受這種曾經(jīng)“高大上”的運控解決方案,很大程度上是由于新的控制器和以太網(wǎng)技術(shù)為產(chǎn)線設(shè)備所帶來的總體成本和效益的優(yōu)化。這種優(yōu)化并不僅僅是硬件成本的降低(事實上很多硬件產(chǎn)品的成本是增加的),而更多的是體現(xiàn)在因系統(tǒng)結(jié)構(gòu)的簡化、功能的整合、性能的提升、操作的易用性...而給企業(yè)創(chuàng)造出來的附加價值與綜合收益。
PicSource:B&R Automation
不過,考慮到當下工業(yè)以太網(wǎng)協(xié)議各大品牌/陣營割據(jù)圈地的現(xiàn)狀,設(shè)備用戶在選擇其伺服運控系統(tǒng)時或許并沒有那么自由。盡管各家都宣稱自己的系統(tǒng)與所采用的技術(shù)是開放的,但實際上,在控制平臺的搭建上,其品牌/陣營的排他性現(xiàn)象還是明顯存在的。除了采用 EtherCAT 這種目前比較普及的通訊協(xié)議的運控/自動化產(chǎn)品以外,大部分品牌的設(shè)備控制器基本只能兼容自家(或合作體系內(nèi))的伺服產(chǎn)品。用戶很多時候,不得不因此為了某一個功能而被整個品牌的全系列產(chǎn)品所綁架。而這種局面,目測至少要等到下一代工業(yè)通訊技術(shù)出現(xiàn)時才可能有所改觀。
PicSource:mcrazy | FANUC Robot Controller
另外,需要指出的是,上面所說的這種集成運控系統(tǒng),應(yīng)該更加適合那些通用的非標自動化設(shè)備,比如:包裝機、輪胎成型機...等,而對于像數(shù)控加工、工業(yè)機器人...等類型的專機設(shè)備,貌似并不太適用,至少目前是這樣的。例如:機床設(shè)備所使用的 CNC 數(shù)控系統(tǒng),工業(yè)機器人所使用的集成伺服驅(qū)動單元的專用控制器...等等。道理其實也并不復(fù)雜,單機應(yīng)用、功能標準、技術(shù)成熟、產(chǎn)量巨大...等多方面因素,足夠支撐這些專機應(yīng)用去開發(fā)和使用專用的運動控制系統(tǒng)。
PicSource:SINUMERIK
盡管從技術(shù)角度看,通用控制器應(yīng)該已經(jīng)完全具備了處理專機任務(wù)的能力,但要知道,這些經(jīng)過多年積累、極為成熟,且早已經(jīng)被市場驗證與認可的專機應(yīng)用,其軟件代碼移植、集成和測試的工作量是巨大的,尤其是那些高難度的復(fù)雜應(yīng)用,如:某些特殊的 G-Code、多自由度機器人的空間坐標系轉(zhuǎn)換...等。
PicSource:Bosch Rexroth
Motion Logic Control for Robots
短期內(nèi),專機設(shè)備用戶或許更傾向于借助通用的網(wǎng)絡(luò)技術(shù),將整機在數(shù)據(jù)通訊和信息交互層面與產(chǎn)線系統(tǒng)進行集成與融合(如數(shù)控機床、機器人與通用自動化設(shè)備的集成),而并沒有足夠的動力去對底層控制架構(gòu)進行太大的調(diào)整。但從長遠看,將機器人和數(shù)控...等專機應(yīng)用整合到通用的自動化控制系統(tǒng)之中,則必定是行業(yè)發(fā)展的大勢所趨。
實際上,這件事已經(jīng)在某些領(lǐng)域悄然開始了......
編輯:hfy
-
伺服電機
+關(guān)注
關(guān)注
88文章
2185瀏覽量
61284 -
運動控制
+關(guān)注
關(guān)注
5文章
821瀏覽量
34537 -
交流伺服
+關(guān)注
關(guān)注
0文章
36瀏覽量
10541 -
動力電源
+關(guān)注
關(guān)注
0文章
8瀏覽量
1993
發(fā)布評論請先 登錄
提高步進伺服系統(tǒng)精度的措施

行星減速機與伺服電機交流了解
PLC怎么控制多臺交流伺服電機達到同步工作

伺服基礎(chǔ)知識詳解

交流伺服電機及其調(diào)速分類和特點

伺服電機的控制方式簡述

伺服精準控制優(yōu)選!電子谷伺服連接線適配多品牌穩(wěn)定傳輸

伺服電機控制系統(tǒng)的高寬帶電流環(huán)參數(shù)設(shè)計

伺服直線模組:自動化領(lǐng)域的高效傳動解決方案
MT6825磁編芯片為伺服電機控制系統(tǒng)帶來全角度測量能力
MT6825磁編芯片:為伺服電機控制系統(tǒng)注入全角度測量新活力
信捷電氣DM6C系列多機傳動伺服驅(qū)動器介紹
EtherCAT與Profinet協(xié)議轉(zhuǎn)換在工業(yè)自動化中的應(yīng)用:以匯川伺服驅(qū)動器為例
單片機和伺服有什么區(qū)別
EtherCAT科普系列(3): EtherCAT技術(shù)在伺服驅(qū)動器領(lǐng)域的應(yīng)用




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論