 線性陣列波束特性和陣列因子
線性陣列波束特性和陣列因子

雖然數字相控陣在商業以及航空航天和防務應用中不斷增長,但許多設計工程師對相控陣天線并不算了解。相控陣天線設計并非新生事物,經過數十年的發展,這一理論已經相當成熟,但是,大多數文獻僅適合精通電磁數學的天線工程師。隨著相控陣開始包含更多混合信號和數字內容,許多工程師可以從更直觀的相控陣天線方向圖說明中獲益。事實證明,相控陣天線行為與混合信號和數字工程師每天處理的離散時間采樣系統之間有許多相似之處。
本系列文章的目的并非培養天線設計工程師,而是向使用相控陣子系統或器件的工程師展現他們的工作對相控陣天線方向圖的影響。
波束方向
首先,讓我們來看看一個直觀的相控陣波束轉向示例。圖1是一個簡單的圖示,描繪了波前從兩個不同方向射向四個天線元件。在接收路徑上的每個天線元件后面都會產生延時,之后所有四個信號再匯總到一起。在圖1a中,該延時與波前到達每個元件的時間差一致。在本例中,產生的延時會導致四個信號同相到達合并點。這種一致的合并會增強組合器輸出的信號。在圖1b中,產生的延時相同,但在本例中,波前與天線元件垂直。現在產生的延時與四個信號的相位不一致,因此組合器輸出會被大幅削弱。
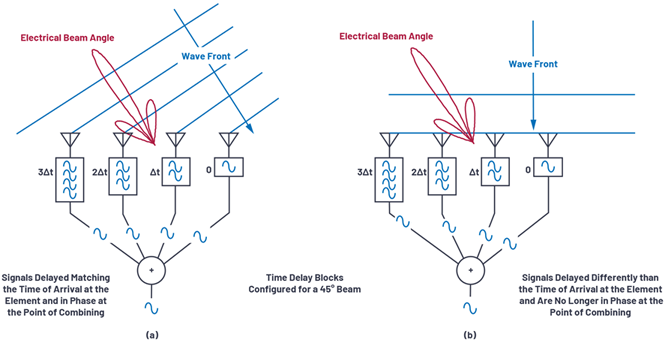
圖1. 理解轉向角度。
在相控陣中,延時是波束轉向所需的可量化變量。但也可以通過相移來仿真延時,這在許多實現中是十分常見且實用的做法。我們將在介紹波束斜視的部分討論延時與相移的影響,但目前我們先來了解相移實現,然后推導相應相移的波束轉向計算。
圖2所示為使用移相器而非延時的相控陣排列。請注意,我們將瞄準線方向(θ= 0°)定義為垂直于天線正面。瞄準線右側定義為正角θ,瞄準線左側定義為負角。
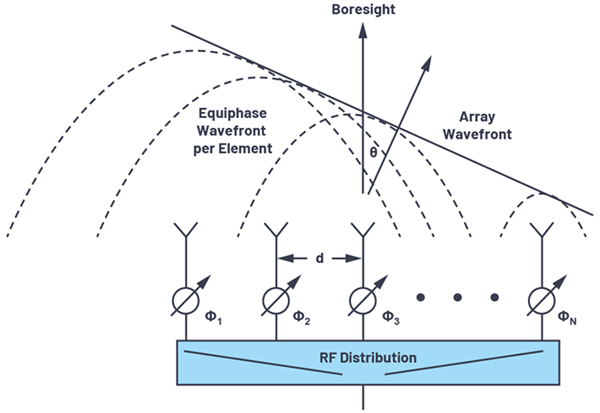
圖2. 使用RF移相器的相控陣概念。
要顯示波束轉向所需的相移,可以在相鄰元件之間繪制一組直角三角形,如圖3所示。其中,ΔΦ表示這些相鄰元件之間的相移。

圖3. 相移ΔΦ與波束轉向角度的推導。
圖3a定義了這些元件之間的三角恒等式,各元件之間相隔距離用(d)表示。波束指向與瞄準線相距θ的方向,波束距離視平線的角度為φ。在圖3b中,我們看到θ與φ的和為90°。這樣我們就可以計算L,因為L = dsin(θ),L表示波傳播的變量距離。波束轉向所需的延時等于波前遍歷該距離L所用的時間。如果將L視作波長的分數,則相位延遲可以用該延時替代。ΔΦ等式可以定義為相對于θ,如圖3c所示以及等式1中的重復計算。

如果元件間隔正好等于信號波長的一半,則可以進一步簡化為:

我們以具體示例來計算這些等式。假設兩個天線元件間隔15 mm。如果一個10.6 GHz的波前以距離機械瞄準線30°的角度到達,那么這兩個元件之間的最佳相移是多少?
·θ= 30o = 0.52 rad
·λ= c/f = (3 × 108m/s)/10.6 GHz = 0.0283 m
·?Φ = (2π × d × sinθ)/λ = 2π × 0.015 × sin(0.52)/0.0283 m = 1.67 rad = 95o
所以,如果波前以θ= 30°到達,并將相鄰元件的相位移動95°,則可以使兩個元件各自的信號實現一致疊加。這樣就可以使該方向的天線增益達到最大值。
為深入理解相移如何隨著波束方向(θ)而變,圖4以圖形方式繪制了不同條件下的這些等式圖解。從這些圖形中可以觀察到一些有趣的現象。比如,d = λ/2時,瞄準線附近的斜率約為3:1,即等式2中的乘數π。這種情況還展示出,元件之間達到180°完整相移會使波束方向達到理論相移90°。實際上,在真實的元件方向圖中,這是不可能實現的,但等式的確顯示出理論上的理想值。需要注意的是,d > λ/2時,不存在能夠提供完整波束位移的相移。在后面的文章中,我們將會介紹該情況會導致天線方向圖中的柵瓣,該圖形是第一次表明,d > λ/2情況下的行為有所不同。
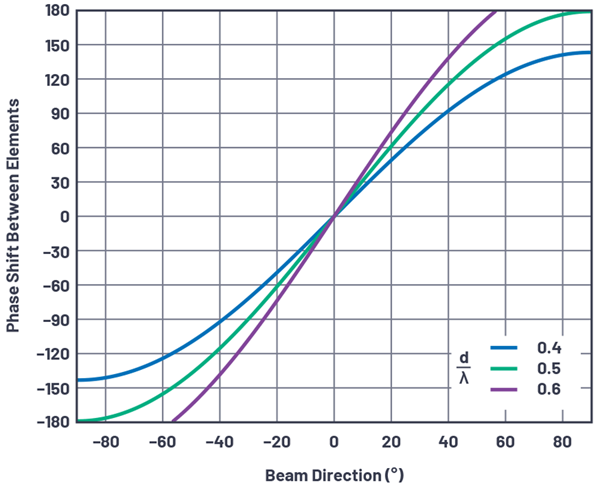
圖4. 三種d/λ情況下,元件之間的相移ΔΦ與波束方向(θ)之間的關系。
等間隔線性陣列
上文推導的等式僅適用于兩個元件。但實際的相控陣可能在兩個維度上包含數千個間隔開的元件。但出于本文用途,我們僅考慮一個維度:線性陣列。
線性陣列為單元件寬度,其中包含N個元件。不同線性陣列,間隔可能各有不同,但同一線性陣列通常是等間隔。因此,在本文中,我們將各個元件之間的間隔設為統一距離d(圖5)。該等間隔線性陣列模型雖然是簡化版,但基本介紹了天線方向圖如何形成以及各種不同的條件。我們可以進一步運用線性陣列原理來理解二維陣列。

圖5. 等間隔線性陣列(N = 4)。
近場與遠場
如何將上文針對N = 2的線性陣列推導的公式運用到N = 10,000的線性陣列呢?現在,似乎每個天線元件都以稍微不同的角度指向球形波前,如圖6所示。
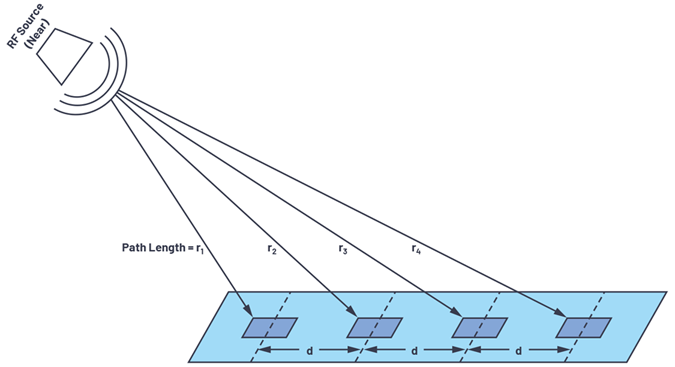
圖6. RF信號源與線性陣列較近。
如果RF源較近,則每個元件的入射角不同。這種情況稱為近場。我們可以算出所有這些角度,有時需要這么做是為了進行天線測試和校準,因為我們的測試裝置只能這么大。但如果RF源較遠,則就是圖7所示的情況。

圖7. RF信號源與線性陣列相隔較遠。
如果RF源較遠,則球形波前的大半徑會導致大致平行的波傳播路徑。因此,所有波束角均相等,每個相鄰元件的路徑長度(L = d ×sinθ)均超過隔壁元件。這樣簡化了數學計算,意味著我們推導出來的雙元件等式可以應用到數千個元件,但前提是這些元件間隔相同。
但在什么情況下可以做出遠場假設?遠場有多遠?雖然稍顯主觀,但通常而言,遠場定義是超過:

其中,D表示天線直徑(對于等間隔線性陣列為(N-1) ×d)
對于小型陣列(D值小)或低頻(λ值大),遠場距離較小。但對于大型陣列(或高頻),遠場距離可能長達數千米!這樣測試和校準陣列就十分困難。對于這類情況,可以使用更為詳細的近場模型,然后再按比例擴展到真實世界使用的遠場陣列。
天線增益、方向性和孔徑
在繼續深入之前,先了解天線增益、方向性和孔徑的定義十分有用。首先介紹增益與方向性,因為這兩個概念經常互換使用。天線增益和方向性是相較于各向同性天線而言,各向同性天線是所有方向均勻輻射的理想天線。方向性是指在特定方向上測得的最大功率Pmax與所有方向輻射的平均功率Pav的比值。如果沒有定義方向,則方向性通過等式4確定。

在比較天線時,方向性是一個有用指標,因為它定義了集中輻射能量的能力。增益與方向性的方向圖相同,但增益包含天線損耗。

Prad是總輻射功率,Pin是輸入到天線的功率,k表示天線輻射過程中的損耗。
接下來,我們將天線方向圖視為三維方向的函數,將方向性視為波束寬度的函數。

圖8. 投射到球體的面積的三維視圖。
球體的總表面積是4π2,球體上的面積以球面度為單位定義,等于球體中的4π球面度。因此,來自各向同性輻射體的功率密度為

采用的單位為(W/m2)。
球體上的一塊面積有兩個角方向。在雷達系統中,這兩個角方向通常稱作方位角和俯仰角。波束寬度可以描述為每個角方向的函數(θ1和θ2):該組合會在球體上形成一塊面積ΩA.
ΩA是以球面度為單位表示的波束寬度,可以近似為ΩA≈ θ1× θ2.
確認ΩA為球體上的面積后,方向性可以表示為

我們將要考慮的第三個天線術語是孔徑。天線孔徑表示用于接收電磁波的有效面積,包含相對于波長的函數。各向同性天線的孔徑為

增益是相對于各向同性天線而言,產生的有效天線孔徑為

綜合三個術語來看,可以將增益視作用于定義輻射方向圖的角的函數,表示天線中的效率(或損耗)。
線性陣列的陣列因子
目前,我們能夠預測元件之間的最佳時間(或相位)變量來實現最大天線方向性。但我們非常需要了解和操作完整的天線增益方向圖。這分為兩個主要方面。首先,陣列的每個獨立元件(或許是貼片)都存在增益,稱為元件因子(GE)。其次,通過陣列波束成型會產生增益影響,稱為陣列因子(GA)。全陣列天線增益方向圖是這兩個因子的組合,如等式10所示。

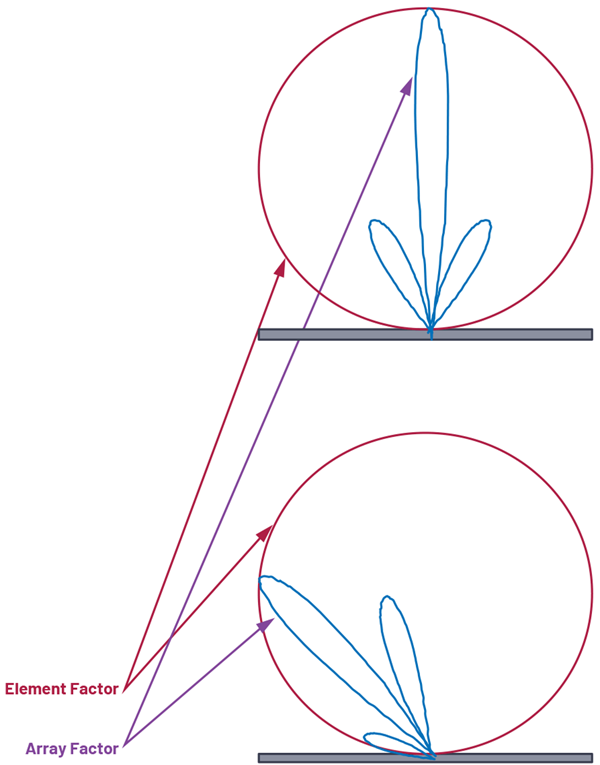
圖9. 元件因子和陣列因子。
圖9.元件因子和陣列因子。GE表示陣列中單個元件的輻射方向圖。其定義取決于天線的幾何形狀和構造,而不是在運行中會發生變化的因素。知道這一點很重要,因為這會限制總陣列的增益——尤其是靠近視平線時。但由于我們不采用電子控制,因此可以將它保持固定不變,作為總相控陣增益等式的影響因子。在本文中,我們假設所有獨立元件都有相同的元件因子。
接下來重點介紹陣列因子GA。陣列因子的計算基于陣列幾何結構(d表示等間隔線性陣列)和波束權重(幅度和相位)。推導等間隔線性陣列的陣列因子十分簡單,但本文末尾引用的參考文獻中詳細介紹了相關內容。
文獻中使用的等式各有不同,具體取決于線性陣列參數的定義方式。我們使用本文中的等式,以便與圖2和圖3中的定義保持一致。由于主要問題在于增益如何變化,因此繪制相對于單位增益的標準化陣列因子通常更具指導意義。標準化陣列因子可以寫為等式11。


我們已將波束角度θ0定義為元件之間的相移的函數θ0;因此,我們也可以將標準化天線因子寫為等式12

陣列因子等式中假設的條件包括:
·元件間距相等。
·元件之間的相移相同。
·所有元件的幅度相同。
接下來,我們利用這些等式繪制多種陣列尺寸的陣列因子。
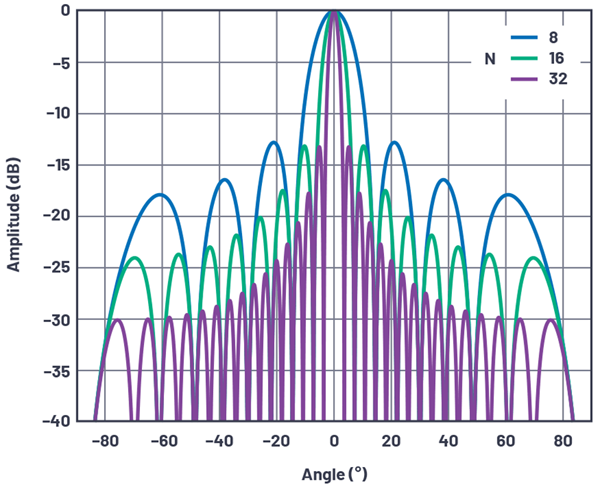
圖10. 位于線性陣列瞄準線的標準化陣列因子,其中元件間隔為d = λ/2,元件數量分別為8、16和32。
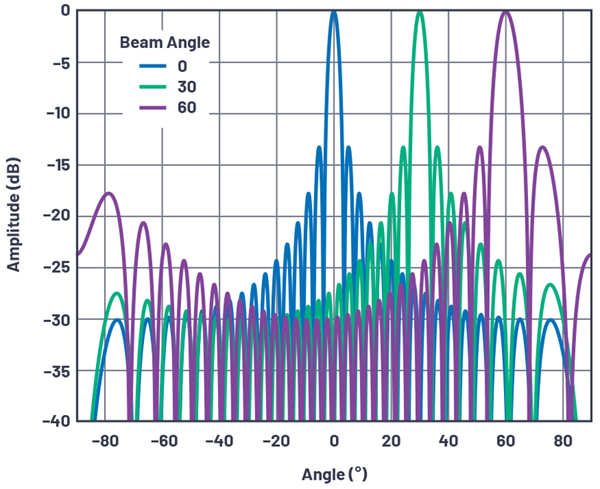
圖11. 處于多種波束角度的32元件線性陣列的標準化陣列因子,其中元件間隔為d = λ/2。
從這些數據中可以觀察到以下幾點:
·第一個旁瓣位于–13 dBc,與元件數量無關。這是由陣列因子等式中的sinc函數決定的。旁瓣可以通過逐漸減少元件中的增益來改善,這一主題將在本系列后續內容中探討。
·波束寬度隨著元件數量而減小。
·掃描的波束離瞄準線越遠,波束寬度會隨之變寬。
·零點的數量隨著元件數量的增加而增多。
波束寬度
波束寬度是天線角度分辨率的一個指標。最常見的是通過半功率波束寬度(HPBW)或主瓣的零點到零點的間隔(FNBW)定義波束寬度。要找到HPBW,從峰值向下移動3 dB,并測量角距,如圖12所示。

圖12. 天線波束寬度的定義(所示線性陣列為N = 8,d = λ/2,θ= 30°)。
利用我們的標準化陣列因子等式,可以通過將等式3設為等于半功率級別(3 dB或1/√2)來解算該HPBW。我們假設機械瞄準線(θ= 0°)、N = 8且d = λ/2。

然后解算?Φ得出0.35 rad。利用等式1并解算θ:

該θ是到達3 dB點(即HPBW的一半)的峰值。因此,我們只需要將它乘以2即可獲得3 dB點之間的角距。這會得出12.8°的HPBW。
我們可以對等于0的陣列因子重復這個計算,并獲得在前文所述條件下的第一個零點到零點的間隔角度FNBW 28.5°。
對于等間隔線性陣列,等式15可計算出HPBW [1,2]的近似值。

圖13繪制了在λ/2元件間隔條件下多種元件數量的波束寬度與波束角。

圖13. 元件數量為16、32和100時,元件間隔為λ/2的波束寬度與波束角。
在此圖中,值得注意的是與業界正在開發的陣列尺寸相關的一些觀察結果。
·1°波束精度要求存在100個元件。如果方位角和俯仰角都有此要求,則會產生包含10,000個元件的陣列。1°精度只會出現在近乎理想條件下的瞄準線處。在現場陣列中,若要在多種掃描角中保持1°精度,將會進一步增加元件數量。這一觀察結果會為超大陣列設定波束寬度的實際限制。
·1000個元件的陣列是業界常見陣列。如果每個方向32個元件,則總共擁有1024個元件,靠近瞄準線處會產生小于4°的波束精度。
·256個元件的陣列可以低成本量產,并且仍具有小于10°的波束指向精度。這或許是許多應用能夠接受的理想選擇。
·另外還需注意的是,對于上述任何情況,波束寬度在60°偏移處將會翻倍。這是因為分母中有cosθ,受陣列投影縮減的影響;即,從某個角度觀察時,陣列看起來像是縮小的交叉部分。
組合元件因子和陣列因子
上一節僅考慮了陣列因子。但為了找出總天線增益,還需要元件因子。圖14描述了一個示例。在該示例中,我們使用一個簡單的余弦形狀作為元件因子,或標準化元件增益GE(θ)。余弦滾降在相控陣分析中十分常見,如果考慮的是平面,則可以將它顯示出來。在寬邊,有一個最大面積。隨著角度遠離寬邊,可見面積會隨著余弦函數而減小。
在上文的λ/2間隔、均勻輻射方向圖、含16個元件的線性陣列中使用了陣列因子GA(θ)。總方向圖是元件因子和陣列因子的線性乘積,因此采用dB刻度,可以將它們相加。

圖14. 元件因子和陣列因子組合形成總天線方向圖。
隨著波束遠離瞄準線的一些觀察結果:
·主波束的幅值按照元件因子的速率衰減。
·瞄準線上的旁瓣沒有幅度損失。
·在原理瞄準線時總體陣列的旁瓣性能下降。
天線繪圖:笛卡爾與極坐標
目前使用的天線方向圖繪圖一直采用笛卡爾坐標。但采用極坐標繪制天線方向圖也很常見,因為它們更容易表示從天線向外部空間輻射的能量。圖15是圖12的重繪版本,但使用的是極坐標。請注意,采用的數據完全相同,只是以極坐標系統重新繪制。能夠以任一表示方法呈現天線方向圖是十分有意義的,因為這兩種系統在文獻中均會使用。在本系列的大部分內容中,我們將使用笛卡爾坐標,因為該表示方法更容易比較波束寬度和旁瓣性能。
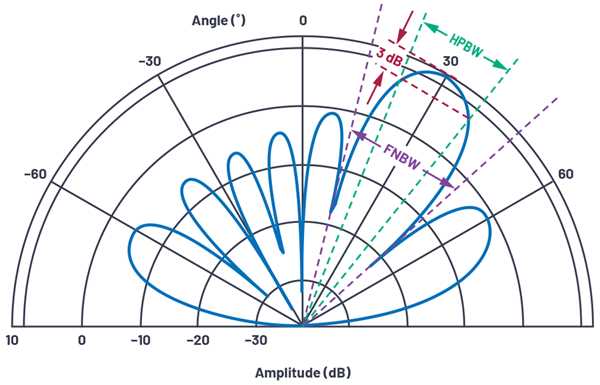
圖15. N = 8,d = λ/2,θ= 30°的極坐標天線方向性繪圖。
陣列相互作用
截至目前,所有圖解和文字均描述的是陣列接收的信號。那么對于發射陣列會有何不同呢?幸運的是,大多數天線性陣列存在相互作用關系。因此,接收天線的所有圖解、等式和術語與發射天線相同。有時將波束視為由陣列接收會更容易理解。而有時,比如就柵瓣而言,或許將陣列視為發射波束更為直觀。在本文中,我們通常將陣列描述為接收信號。但如果對您而言難以想象,也可以從發射角度思考相同的概念。
小結
本系列第1部分至此結束。本文介紹了關于相控陣波束轉向的概念。推導并以圖形方式展示了用來計算波束轉向的陣列相移的等式。然后通過觀察元件數量、元件間隔和波束角對天線響應的影響,定義了陣列因子和元件因子。最后,展示了以笛卡爾與極坐標表示的天線方向圖對比。
在本系列后續文章中,將進一步探討相控陣天線方向圖和減損。我們將研究天線變窄如何導致旁瓣縮小,柵瓣是如何形成的,以及在寬帶系統中相移與延時的影響。本系列最后將對延遲塊的有限分辨率進行分析,介紹它如何形成量化旁瓣并降低波束分辨率。
-
線性陣列
+關注
關注
0文章
4瀏覽量
6812 -
相控陣天線
+關注
關注
2文章
48瀏覽量
9468
原文標題:相控陣天線方向圖:線性陣列波束特性和陣列因子
文章出處:【微信號:mwrfnet,微信公眾號:微波射頻網】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
陣列雷達波測流系統:多波束技術賦能水文流量精準監測

DC-DC電源模塊在數字陣列雷達的應用方案

服務器數據恢復—EqualLogic存儲上raid5磁盤陣列數據恢復案例
陣列式雷達流量監測站-案例分享

中航光電推出二維FA光纖陣列組件
關于CAPSENSE?接近按鈕傳感器陣列的設計問題求解
raid5數據恢復—Raid陣列重建后如何恢復原陣列的數據?
保偏光纖陣列的應用領域和發展趨勢
陣列雷達波測流系統工作原理詳解
高通SoC陣列服務器
基于接觸起電和靜電感應原理,開發新型傳感器陣列

VirtualLab Fusion應用:微透鏡陣列CMOS傳感器分析
服務器數據恢復—raid5陣列中硬盤壞道導致陣列崩潰的數據恢復案例
服務器數據恢復—Raid5陣列熱備盤上線失敗的數據恢復案例
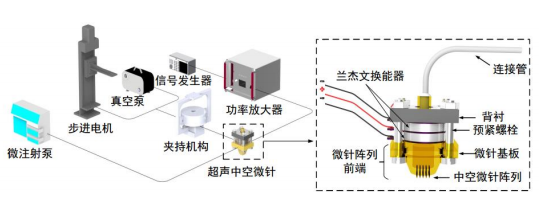
ATA-2041高壓放大器在超聲微針陣列系統模塊中的應用



 工商網監
工商網監
評論