 相鄰兩站地基激光雷達數據中視覺遮擋點之間的關系
相鄰兩站地基激光雷達數據中視覺遮擋點之間的關系

通過森林資源調查制定和調整林業政策是保證森林資源可持續發展的前提。激光雷達可穿透森林冠層,在獲取森林三維結構信息上具有優勢,目前已被應用于森林資源調查中。然而,受激光掃描角度的限制和森林樹木遮擋的影響,常見的單一激光雷達設備難以一次性獲取完整的森林結構觀測。多源/多平臺激光雷達數據間的融合是解決上述問題的有效手段,由于森林環境的復雜性和不規則性,仍缺乏穩健的幾何特征用于多源激光雷達數據間的自動高精度配準,這也是該領域的難點之一。
中國科學院植物所郭慶華研究組利用在單站地基激光雷達數據中樹干遮擋會形成陰影區域的特性,直接從原始地基點云中提取視覺遮擋點作為關鍵特征,采用枚舉的方式恢復了多站地基激光雷達掃描時的相互空間位置關系,實現了數據間的自動高精度配準。該方法在針葉林、針闊混交林和熱帶雨林中均得到了有效驗證,將森林環境中高精度地基三維激光雷達數據獲取效率提高了數十倍。此外,研究團隊以單木參數為橋梁,根據每個自然林分內樹木位置的空間分布具有獨特性的假設,實現了“空—地”平臺激光雷達數據之間的融合,克服了單一激光雷達平臺在森林資源調查中難以掃描完整森林冠層的局限性,為動態、高效、精準的森林資源調查奠定了基礎。
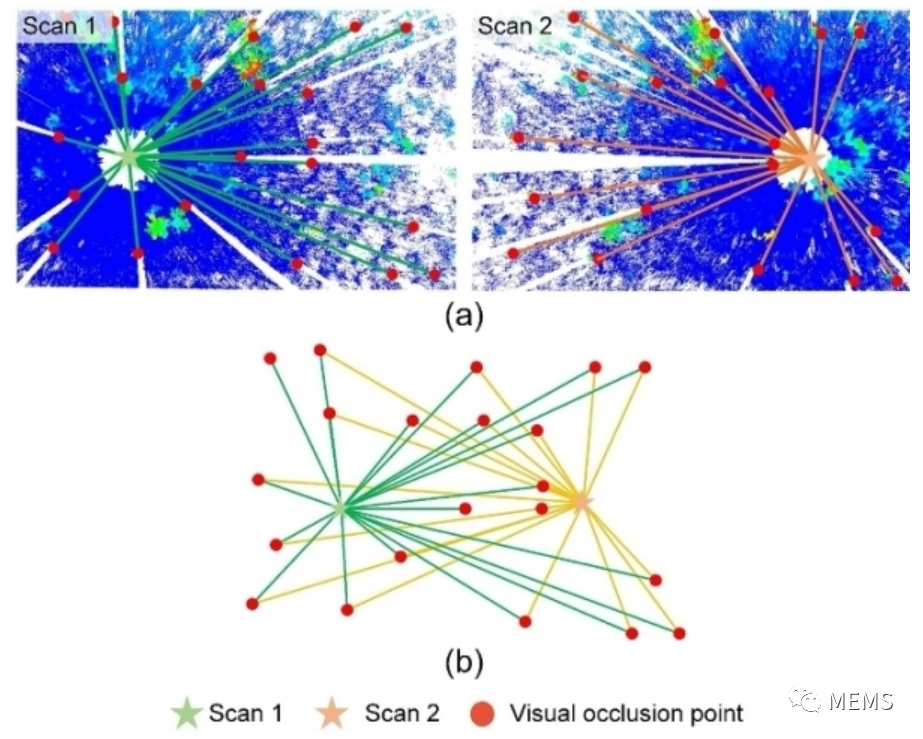
多站地基激光雷達數據自動配準原理示意圖。(a)單站地基激光雷達數據中樹木的遮擋現象;(b)相鄰兩站地基激光雷達數據中視覺遮擋點之間的關系。
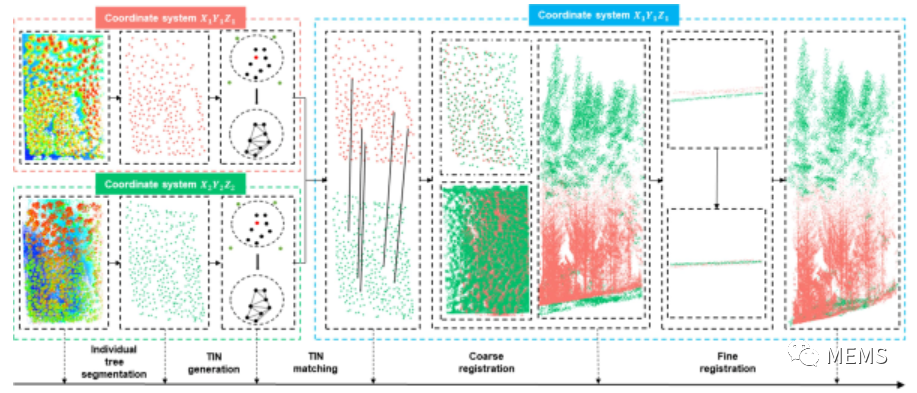
“空—地”平臺激光雷達數據之間的融合原理示意圖。圖中紅色代表地面激光雷達平臺獲取的數據,綠色代表無人機平臺獲取的數據。
相關研究成果分別在線發表在ISPRS Journal of Photogrammetry and Remote Sensing和IEEE Transactions on Geoscience and Remote Sensing上。郭慶華研究組博士研究生關宏燦為第一作者,副研究員蘇艷軍為通訊作者。研究工作得到了中科院前沿科學重點研究項目、國家自然科學基金委(面上項目)等的資助。
責任編輯:pj
-
數據
+關注
關注
8文章
7339瀏覽量
94827 -
無人機
+關注
關注
236文章
11313瀏覽量
195872 -
激光雷達
+關注
關注
980文章
4482瀏覽量
196610
發布評論請先 登錄
為什么自動駕駛激光雷達點云中間是黑洞?

如何解決激光雷達點云中“鬼影”和“膨脹”問題?

激光雷達點云為什么會出現吸點現象?
激光雷達點云中“鬼影”和“膨脹”是什么原因導致的?
激光雷達為什么會出現串擾的問題?


納芯微柵極驅動器NSD2017在激光雷達應用中PCB設計的注意點

自動駕駛里的激光雷達有何作用?

禾賽科技再獲美國Motional激光雷達訂單

全固態激光雷達為什么遲遲未來?其技術難點是什么?
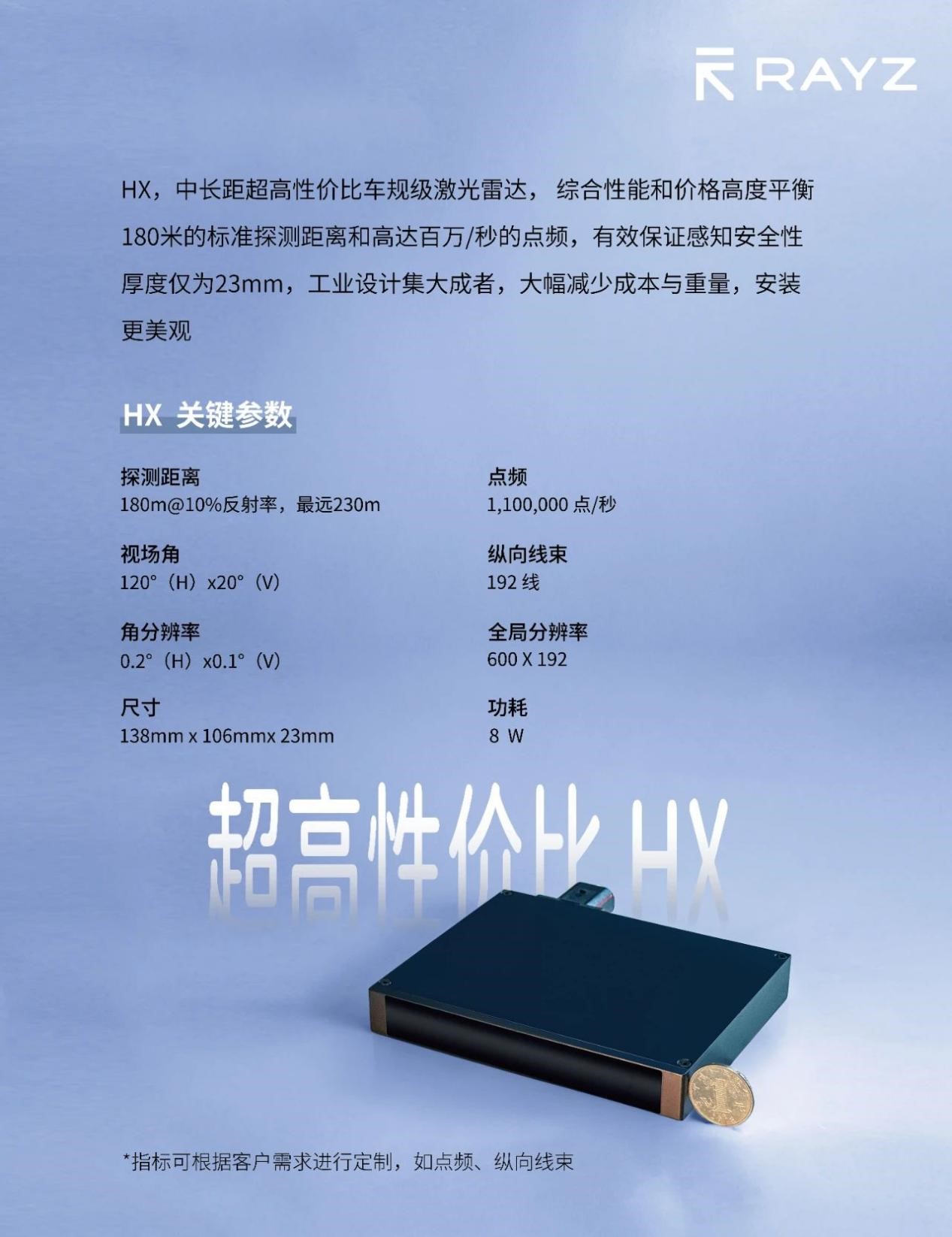
兩款車規激光雷達新品:23mm超薄+廣角
一種新型激光雷達慣性視覺里程計系統介紹

自動駕駛激光雷達:原理、類型與應用梳理

激光雷達技術原理解析



 工商網監
工商網監
評論