 機器人通過哪個端口將 WorkVisual PC 連接到控制系統上?
機器人通過哪個端口將 WorkVisual PC 連接到控制系統上?

如果在一個 KRC4 上拆下了兩個 KSP 模塊,并且在其他模塊的相應插接位置處又重新安上,則將出現下列故障信息:

1.其原因是安全的EtherCatProtokollFSoE。
2.各模塊的位置及FSoE地址均已確定。
3.對于EtherCat Master 來說有兩種可能出現此情況
?通過調換兩個模塊 FSoE地址保持不變,但位置已更改。
?兩個模塊均已保留在正確的插接位置處,但是接線順序被更改。
4.EtherCat Master 始終需要明確的唯一狀態以便實現安全通訊。
5.而這兩種情況不滿足此條件。
6.KCB 進入安全狀態。
確定實際應用的設備的庫卡序列號。 對于 KSP 和 KPP,其序列號在銘牌上。

1 一般性序列號
2 庫卡專有序列號
查知 KPP和 KSP 模塊序列號
通過 KCB-庫卡控制器總線賦值 FSoE更改的地址。
查知 KPP和 KSP 模塊序列號
WorkVisual電腦的IP 地址和與其相連 (KSI 或 KLI) 的接口的 IP地址位于同一個子網中。
1. 在項目結構中將所涉及的控制柜設為激活狀態。
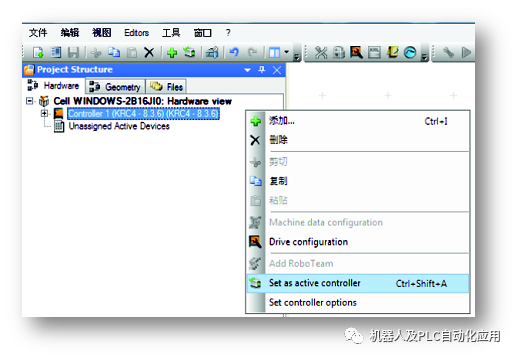
為此標出控制系統,并通過鼠標右鍵打開快捷方式菜單。點擊菜單項“設為激活的控制器”。項目結構將擴展添加控制柜相關的總線結構。
2. 定義控制系統的Windows 接口。
通過哪個端口將 WorkVisual PC 連接到控制系統上 (例如 KLI)
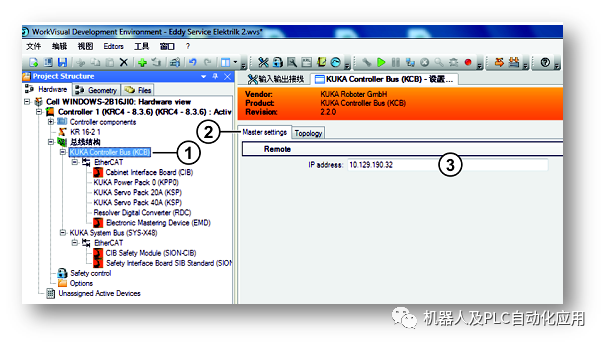
在窗口項目結構的選項卡設備中雙擊節點庫卡控制器總線 (KCB)(1)。
窗口 KUKA控制器總線 (KCB)-設置 … 將打開。
切換到選項卡主站設置(2)中。
輸入 機器人控制系統的 IP 地址(Windows 接口的 VLAN)(3)。
點擊OK鍵,以應用說明并關閉窗口。
3. KCB - KUKA 控制器總線與 WorkVisual連接。
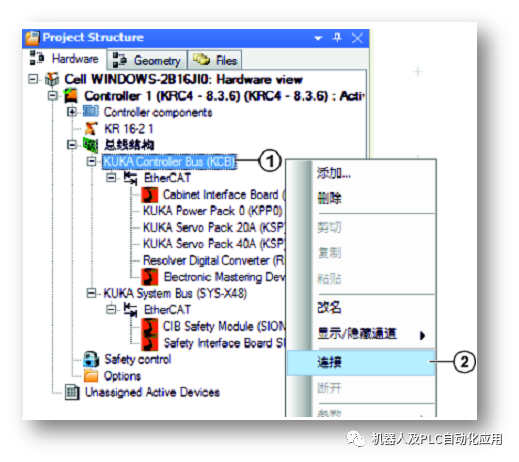
用右鍵點擊節點庫卡控制器總線 (KCB)(1)并在快捷菜單中選擇連接(2)。這個節點現在以綠色斜體標示。
4. 在節點庫卡控制器總線 (KCB) 下方用右鍵點擊相關設備 (1)并在彈出菜單中選擇連接(2)。

這個設備名稱現在以綠色斜體顯示。
5. 在 SmartPad的信息窗口中顯示下列信息:
《ECAT-CTRLBUS》Ethercat RAS Client 連接激活

6. 再次右鍵點擊該設備(1)并在彈出菜單中選擇 功能(2)》FSoE-Slave-Adressevergeben.。. ( 3 )。

7. 窗口FSoE-Slave_ 地址分配 將打開。
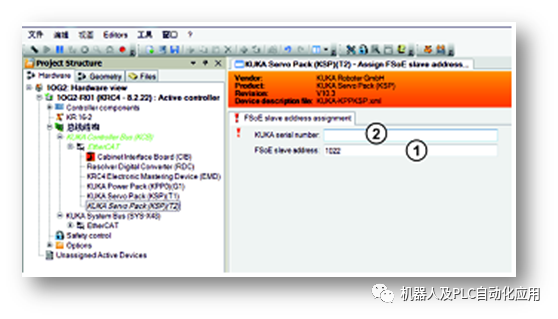
8. 在欄位中輸入更改的FSoE- Slave 地址 (1)。
模塊相關的序列號必須在下一步中填寫 (2)。
如果該號碼與物理序列號不符,則欄位左側將出現紅色的嘆號。
這在輸入過程中也如此,只要尚未完全填寫完畢或號碼錯誤就會有此顯示。
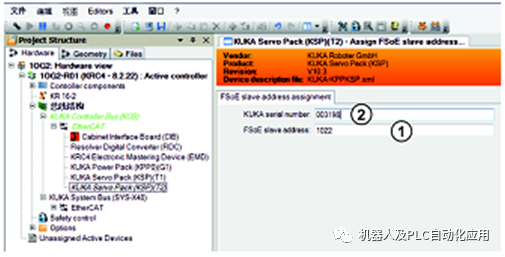
只要已完整正確輸入此號碼,紅色感嘆號即刻消失。
如果序列號正確,則點擊應用。
用 OK關閉窗口。
9. 再次右鍵點擊該設備(1)并在彈出菜單中選擇 斷開( 2 )。
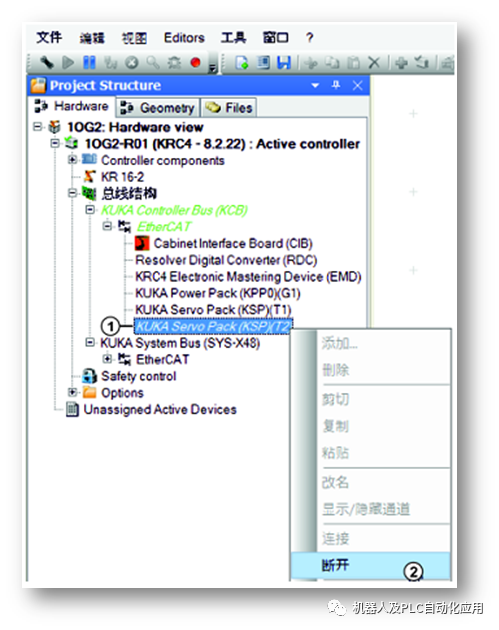
數據此時保存在實際設備上。
但實際控制器總線尚未有訪問設備的權限。
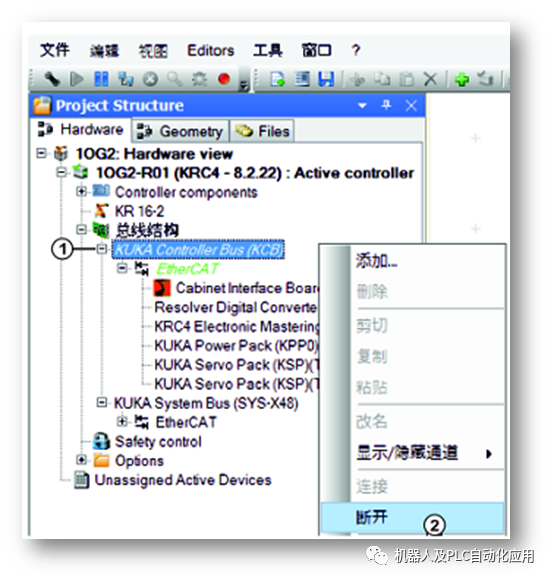
10. 用右鍵點擊節點庫卡控制器總線 (KCB)(1)并在快捷菜單中選擇斷開(2)。
FSoE地址
KSP 左邊
地址:1022KSP 中間
地址:1021KPP 右邊
地址:1020
其他組件
可以為下列組件分配 FSoE 地址。但是實際上這沒有必要,因為它們在每個機器人控制系統中只存在一次。
smartPAD13330
SIB13331
擴展型 SIB13332
CIB1
絕對不允許將 smartPAD、SIB、SIB extended 和 CIB 的地址分配給其他的組件。
責任編輯:pj
-
控制系統
+關注
關注
41文章
6957瀏覽量
114120 -
機器人
+關注
關注
213文章
31084瀏覽量
222316 -
IP
+關注
關注
5文章
1863瀏覽量
155877
發布評論請先 登錄
探索RISC-V在機器人領域的潛力
高精度機器人控制的核心——基于 MYD-LT536 開發板的精密運動控制方案
RK3576機器人核心:三屏異顯+八路攝像頭,重塑機器人交互與感知
自制巡線解迷宮機器人(上)
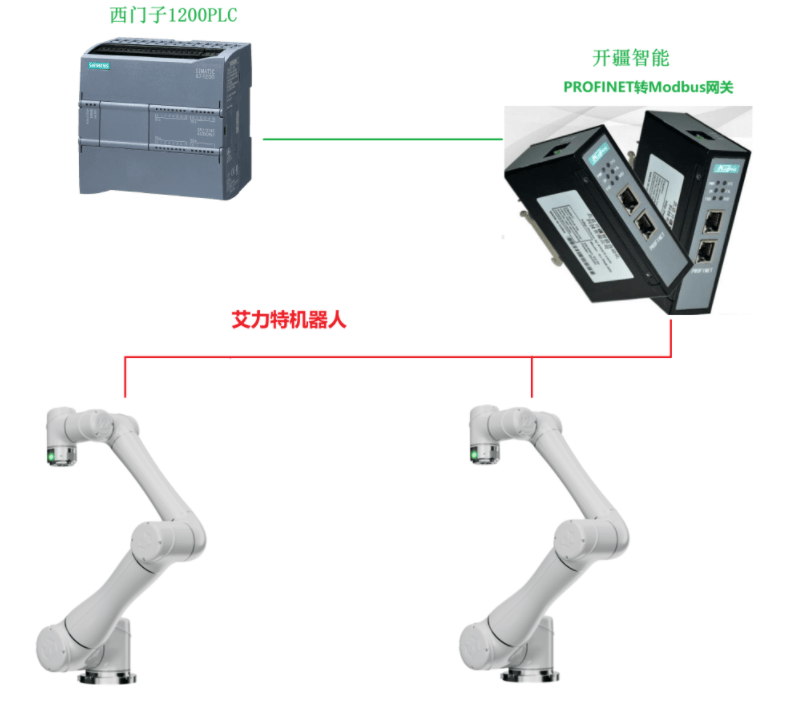
開疆智能Profinet轉ModbusTCP網關連接艾力特機器人配置案例
ADI安全產品如何簡化不同機器人控制系統中安全機制的實現

工業機器人的特點
明遠智睿SSD2351開發板:語音機器人領域的變革力量
詳細介紹機場智能指路機器人的工作原理
鴻道Intewell操作系統助力工業機器人控制系統自主可控
【「# ROS 2智能機器人開發實踐」閱讀體驗】+內容初識
基于先進MCU的機器人運動控制系統設計:理論、實踐與前沿技術
EtherCAT科普系列(7): EtherCAT技術在工業機器人控制系統領域的應用




 工商網監
工商網監
評論