") 航向陀螺儀的組成_航向陀螺儀的功能
航向陀螺儀的組成_航向陀螺儀的功能

航向陀螺儀(directiONalgyroscope)就是利用陀螺特性測(cè)量飛機(jī)航向的飛行儀表,測(cè)量飛機(jī)轉(zhuǎn)彎時(shí)航向角的變化。由于陀螺自轉(zhuǎn)軸不能自動(dòng)跟蹤經(jīng)線,因此測(cè)量航向需要對(duì)自轉(zhuǎn)軸進(jìn)行校正,并使其穩(wěn)定在經(jīng)線方向上,航向指標(biāo)指示的角就是航向角。
航向陀螺儀的組成
航向陀螺儀主要有陀螺電機(jī)、萬向支架、隨動(dòng)托架系統(tǒng)、水平修正裝置、信號(hào)輸出裝置、輸電裝置、減震裝置、電連接器、外殼等組成。
航向陀螺儀的類型
1、直讀式航向陀螺儀,又稱陀螺半羅盤。
2、遠(yuǎn)讀式航向陀螺儀,輸出飛機(jī)航向角變化的信息,供指示器指示或作為陀螺磁羅盤和航向系統(tǒng)的一個(gè)主要部件。
航向陀螺儀的功能
1、航向陀螺儀用于陀螺磁羅盤時(shí),用來穩(wěn)定來自磁航向傳感器的磁航向信號(hào)。
2、用于陀螺半羅盤時(shí),本身就是獨(dú)立的航向傳感器,處處陀螺航向信號(hào)。
3、輸出有效地信號(hào)。
航向陀螺儀的特點(diǎn)
1、具有良好的穩(wěn)定性。
2、就有較高靈敏度。
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點(diǎn)僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場(chǎng)。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請(qǐng)聯(lián)系本站處理。
舉報(bào)投訴
-
陀螺儀
+關(guān)注
關(guān)注
44文章
889瀏覽量
101600 -
飛行儀表
+關(guān)注
關(guān)注
0文章
2瀏覽量
1451
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
熱點(diǎn)推薦
MEMS陀螺儀如何成為動(dòng)態(tài)世界的“定盤星”?
在航空航天、海洋探測(cè)、自主駕駛等高精尖領(lǐng)域,每一次精準(zhǔn)的轉(zhuǎn)向、每一次穩(wěn)定的懸停、每一條精確的航線,其背后都離不開一個(gè)核心的感知部件——陀螺儀。它如同系統(tǒng)的“內(nèi)耳”,通過解算能實(shí)時(shí)感知載體每分每秒

STM32H5開發(fā)陀螺儀LSM6DSV16X(1)----輪詢獲取陀螺儀數(shù)據(jù)
本文將介紹如何通過輪詢(Polling)方式從LSM6DSV16X六軸慣性傳感器中獲取陀螺儀數(shù)據(jù)。輪詢模式是一種常用的傳感器讀取方式,主控MCU定期查詢陀螺儀輸出寄存器,無需依賴中斷機(jī)制即可實(shí)現(xiàn)數(shù)據(jù)采集。該方法適用于對(duì)響應(yīng)時(shí)延要求不高、系統(tǒng)結(jié)構(gòu)簡單的場(chǎng)景,便于快速驗(yàn)證

多軸陀螺儀怎么選?
陀螺儀型號(hào):HLK-AS201-66軸=3軸加速度計(jì)+3軸陀螺儀核心優(yōu)勢(shì)價(jià)格最低:無磁力計(jì)和氣壓計(jì),硬件成本最優(yōu)動(dòng)態(tài)響應(yīng)快:數(shù)據(jù)量小,處理延遲低即插即用:無需磁場(chǎng)校

光纖陀螺儀與慣性導(dǎo)航系統(tǒng)在無人車駕駛中的應(yīng)用
一、光纖陀螺儀與慣性導(dǎo)航系統(tǒng)簡介 光纖陀螺儀是一種基于光學(xué)傳感技術(shù)的精密儀器,利用Sagnac效應(yīng)來檢測(cè)旋轉(zhuǎn)角速度。與傳統(tǒng)的機(jī)械陀螺儀相比,光纖陀螺儀具有全固態(tài)、無旋轉(zhuǎn)部件和摩擦部件、

什么是光纖陀螺儀?陀螺儀有哪些作用?
陀螺儀是干什么用的?陀螺儀是用來感知和測(cè)量物體旋轉(zhuǎn)的一個(gè)傳感器。簡單來說,它可以幫助設(shè)備知道自己當(dāng)前的角度和運(yùn)動(dòng)方向。通常,我們會(huì)在智能手機(jī)、無人機(jī)、VR設(shè)備等科技產(chǎn)品中看到陀螺儀的身影。我第一次
為什么三軸MEMS陀螺儀是無人機(jī)飛控系統(tǒng)的核心傳感器?
在現(xiàn)代無人機(jī)技術(shù)中,三軸MEMS陀螺儀扮演著至關(guān)重要的角色。作為飛行控制系統(tǒng)的核心傳感器,它通過實(shí)時(shí)測(cè)量飛行器的角速度變化,為穩(wěn)定飛行提供關(guān)鍵數(shù)據(jù)支持。以ER-3MG-063 MEMS陀螺儀為例,讓我們深入了解三軸MEMS陀螺儀

MEMS陀螺儀如何實(shí)現(xiàn)高精度尋北?
MEMS陀螺儀的尋北功能,其核心在于精確測(cè)量地球自轉(zhuǎn)角速度的分量。通過解算這些分量,即可確定地理北向。得益于MEMS技術(shù)的持續(xù)發(fā)展,此類陀螺儀在精度與穩(wěn)定性方面已實(shí)現(xiàn)顯著躍升。
MEMS陀螺儀有哪些分類?
你是否好奇,手機(jī)里的指南針、無人機(jī)穩(wěn)定的飛行姿態(tài),甚至火箭精準(zhǔn)的導(dǎo)航,背后都離不開一個(gè)微型“旋轉(zhuǎn)感知器”?這就是MEMS陀螺儀!它憑借小巧身材、低廉成本和優(yōu)異性能,正在取代笨重的傳統(tǒng)陀螺儀,深入我們
MEMS陀螺儀正在取代光纖陀螺儀?
一、微型科技巨匠:MEMS陀螺儀揭秘 何謂MEMS? MEMS(微機(jī)電系統(tǒng))是融合了微電子與微機(jī)械的神奇技術(shù)。它能在指甲蓋大小的硅芯片上集成復(fù)雜的傳感器、執(zhí)行器和處理電路,實(shí)現(xiàn)微觀世界的數(shù)據(jù)感知
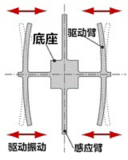
振動(dòng)陀螺儀傳感器的工作原理
陀螺儀傳感器,也稱為角速率傳感器或角速度傳感器,是一種感測(cè)角速度的設(shè)備。陀螺儀傳感器種類繁多,比較常見的有機(jī)械陀螺儀,光學(xué)陀螺儀,流體陀螺儀
陀螺儀在鉆井或測(cè)井中有何用途?
鉆井與測(cè)井作業(yè)對(duì)定向和井眼軌跡控制要求較高,傳統(tǒng)光纖陀螺儀和磁性測(cè)斜儀體積大、抗干擾能力弱、成本高。MEMS陀螺儀憑借其微型化、高可靠性和環(huán)境適應(yīng)性,成為鉆井、測(cè)井核心器件。

求助,關(guān)于ST的IMU和地磁計(jì)用motionfx庫融合后航向角異常的問題求解
是40uT,Y軸是0uT,但是航向角是300度,稍微振動(dòng)傳感器改變加速度計(jì)的值和陀螺儀的值后航向角穩(wěn)定為270度,我不理解為啥磁場(chǎng)輸入正常但是航向角輸出異常呢?查閱資料得知改變傾角后,
發(fā)表于 06-10 07:19
MEMS陀螺儀的尋北原理是什么?精度如何?
MEMS陀螺儀的尋北技術(shù)核心原理基于地球自轉(zhuǎn)特性,通過測(cè)量角速度分量解算出地理北向。隨著MEMS技術(shù)的不斷進(jìn)步,MEMS陀螺儀性能也在不斷提升,已經(jīng)具備了較高的測(cè)量精度和穩(wěn)定性。

求助,關(guān)于傳感器融合庫的使用問題求解
我在做電子羅盤項(xiàng)目,使用了加速度計(jì)、陀螺儀、地磁計(jì)。其中IMU的型號(hào)是ISM330DHCX,地磁計(jì)的型號(hào)是LIS2MDL。在使用motionfx庫融合九軸數(shù)據(jù)時(shí)遇到了航向角不準(zhǔn)確的問題。我通過反復(fù)
發(fā)表于 04-27 08:59



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論