 dfrobotDF9GMS 360度微型舵機簡介
dfrobotDF9GMS 360度微型舵機簡介

簡介
DF9GMS是一款360度微型舵機。舵機內部采用塑料齒輪傳動,輕便小巧。可用于各類應用及DIY制作中,諸如小車,船,風車等等。
360°舵機區別于一般普通舵機的點在于它取消了內部的硬件限位。只能夠控制舵機的旋轉方向和旋轉速度,不能控制旋轉角度。所以功能上更趨向于自帶電機驅動的電機,可以控制正反轉,停止。相對于普通直流電機,360度舵機不需要額外的電機驅動組件,即插即用,小巧方便,Arduino的控制方式與普通舵機相同。舵機工作在4.8~6V電源上時,扭矩可到1.2~1.6Kg*cm。
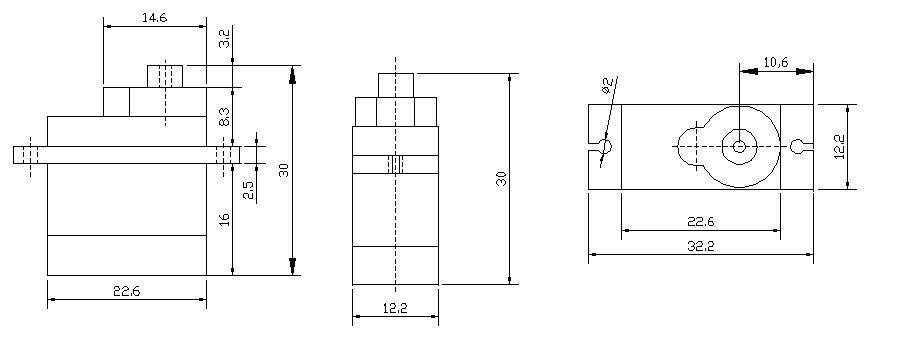
TowerPro SG90C尺寸圖
注意事項:
360°舵機只能控制旋轉方向,不能控制旋轉角度。如需要普通舵機,請選擇DMS-MG90 金屬9g舵機(1.8Kg)。
特性
360°連續旋轉
正反轉控制
技術規格
工作電壓:3.5 - 6.0V
供電電壓:4.8V~6.0V
死區寬度:5usec
工作速度:0.12sec / 60°(4.8V空載)
堵轉轉矩:1.2kg / cm(4.8V),1.6kg / cm(6.0V)
中立位置:1500us
接口說明: 棕色:GND
紅色:VCC
橙色:信號線
連接線長度:250mm
工作溫度:-30°C - + 60°C
產品尺寸:22.6*12.2*30 mm
重量:9±1g
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
嵌入式主板
+關注
關注
7文章
6107瀏覽量
37071 -
DFRobot
+關注
關注
4文章
1164瀏覽量
12403
發布評論請先 登錄
相關推薦
熱點推薦
舵機選型指南:如何為你的項目選擇最合適的舵機
隨著無人機、機器人、智能小家電等產品朝著小型化、功能多樣化方向發展,對微型角度控制的需求日益增長,要求也越來越高。舵機憑借其小型、集成度高、成本較低等優勢,已成為實現精確角度控制的關鍵組件。然而
發表于 12-15 11:03
探索MSX - 360微型操縱桿位置傳感器:小身材大能量
探索MSX - 360微型操縱桿位置傳感器:小身材大能量 在電子設備設計領域,傳感器的性能和適用性對產品的整體表現起著關鍵作用。今天,我們要深入了解一款來自PIHER的MSX - 360微型
舵機伺服編碼器
舵機伺服編碼器是用于實時檢測舵機輸出軸位置、速度或角度的核心反饋元件,它能將機械運動轉化為電信號,讓控制系統實現對舵機的精準閉環控制。 這個問題切得很準,它直接指向了舵機 “精準控制”
PWM信號是如何控制舵機的?
?PWM(脈沖寬度調制)信號控制舵機的核心原理是通過固定周期內高電平的持續時間(脈寬)對應舵機的旋轉角度,舵機內部電路根據檢測到的脈寬驅動電機轉動到目標位置并保持。以下是具體實現過程: 一、核心控制
電動舵機和直線舵機的區別?
,輸出旋轉運動。通常轉動角度范圍有限(常見 0°-180°,部分可達 360° 連續旋轉),例如 1.5ms 的 PWM 脈沖信號對應 90° 中位位置,電機帶動輸出軸轉動到指定角度后保持靜止,即使受外力也能通過閉環反饋維持位置。 直線舵機 :本質是
工業大舵機和普通舵機的區別?
工業大舵機和普通舵機在設計定位、性能參數、應用場景等多方面存在顯著差異,以下是具體對比: 核心性能參數 精度控制 工業大舵機 :配備高精度位置傳感器(如磁阻式絕對值編碼器),精度可達 0.1
無刷舵機與普通舵機等舵機有哪些區別
無刷舵機與普通舵機主要有以下區別: 結構原理 無刷舵機 :由電動機主體和驅動器組成,無刷電機的定子為線圈繞組,轉子為永磁鋼體,通過霍爾傳感器檢測轉子位置,利用集成驅動電路實現電子換向,使電流依序流經
什么是舵機?舵機的種類有哪些?
角度、速度或直線位置,無需額外搭建復雜控制電路,即可實現 “可控、穩定、高精度” 的動作,廣泛用于需要精細運動控制的場景。 一、舵機的核心原理與結構 舵機本質是 “微型一體化運動控制系統”,其精準性源于 閉環控制邏輯 ,內部核心
舵機PWM信號介紹!
舵機 PWM 信號介紹 PWM(Pulse Width Modulation,脈沖寬度調制)信號是舵機的核心控制方式,其通過脈沖的寬度變化來精確指令舵機輸出軸的旋轉角度。以下從信號特性、參數標準
舵機的種類有哪些?
舵機是一種通過控制信號實現精確角度定位的驅動裝置,廣泛應用于機器人、無人機、航模、智能家居等領域。根據不同的分類標準,舵機的種類可以分為以下幾類: 一、按驅動方式分類 這是最常見的分類方式,主要
舵機的執行原理
實現 360° 連續旋轉),并具備一定的輸出扭矩以驅動負載。 一、舵機的基本結構 舵機的核心結構由以下幾個關鍵部分組成,各部分協同工作實現精確的角度控制: 1. 直流電動機 提供基礎動力,通過齒輪減速后驅動輸出軸旋轉。 通常采用
舵機怎么控制正反,舵機怎么使用?
一、舵機怎么控制正反? 舵機的 “正反” 本質是 旋轉方向的控制 ,但其方向邏輯與直流電機不同(并非通過電源正負極切換),而是通過 目標角度與當前角度的偏差 由內部電路自動控制。以下是具體
【嘉楠堪智K230開發板試用體驗】01 Studio K230開發板Test1——舵機控制
, enable=True) # 在同一語句下創建和配置PWM
\'\'\'
\'\'\'
說明:舵機控制函數
功能:180度舵機:angle:-90至90 表示相應的角度
360連
發表于 07-10 09:07
舵機精準定位背后的秘密
從精密的機器人關節到廣闊的工業生產線,從靈活的無人機飛行到精細的醫療手術器械,舵機的身影無處不在,默默推動著自動化技術的飛速發展。那么,舵機究竟是如何實現其精準定位的呢?這背后隱藏著怎樣的技術秘密



 工商網監
工商網監
評論