") 四軸飛行器DIY圖解
四軸飛行器DIY圖解

步驟1:
我們使用的ST360 ARF Quadcopter套件購(gòu)自亞馬遜含稅價(jià)約200美元。如果這是您的第一個(gè)版本,或者您沒有人指導(dǎo)您完成電子設(shè)備和編碼工作,我建議您使用準(zhǔn)備飛行(RTF)套件,并且應(yīng)該使用隨附的飛行控制器。稍后,您將獲得用于無線或自主控制的單獨(dú)微控制器,并且如果與您的主板兼容,請(qǐng)使用隨附的無線發(fā)射器。另外,我建議您從微型直升機(jī)開始。您可以以便宜的價(jià)格獲得250套件,它們確實(shí)很穩(wěn)定,并且您可以學(xué)習(xí)控制直升機(jī)的基本知識(shí)。在購(gòu)買更昂貴的道具和馬達(dá)之前,您需要進(jìn)行一些練習(xí)。
我們的套件隨附了四個(gè)ESC,2個(gè)CW道具,2個(gè)CCW道具,4個(gè)馬達(dá),一個(gè)底盤和一個(gè)飛行控制器。
我在ESC上找不到任何規(guī)格,盡管我們確定它們對(duì)大約0.25毫秒至1.5毫秒之間的脈沖寬度做出響應(yīng)。我將在隨后的步驟中討論P(yáng)AC及其PWM功能。
CW道具的尺寸標(biāo)記為8045,而CCW道具的標(biāo)記尺寸為8045P,其中“ p”表示“推動(dòng)”道具。許多業(yè)余愛好者稱之為CCW道具。
此套件具有8045個(gè)道具,即直徑8英寸,節(jié)距4.5英寸。基本上,道具的直徑?jīng)Q定了直升機(jī)的敏捷性:較長(zhǎng)的道具改變速度的速度較慢,但它們的穩(wěn)定性要高得多。另外,螺距確定螺旋槳旋轉(zhuǎn)一圈時(shí)排出的空氣量。因此,更長(zhǎng)的螺距長(zhǎng)度將需要更多的電力以給定速度通過電動(dòng)機(jī)運(yùn)行。
電動(dòng)機(jī)為KT2210,額定電壓為1050kV。本質(zhì)上,kV額定值是電壓:rpm比率; 1伏特將以1050rpm的速度驅(qū)動(dòng)電動(dòng)機(jī)。由于螺旋槳的尺寸會(huì)影響電動(dòng)機(jī)可施加的扭矩,因此必須將電動(dòng)機(jī)與合適尺寸的螺旋槳配對(duì)。如果您想選擇自己的電動(dòng)機(jī)/道具設(shè)置,這里有一些資源可以幫助您:
我從這里開始:
http://www.tomshardware.com/reviews/multi-rotor-qu。 。.
然后,我通過一堆Google搜索和/r/quadcopter進(jìn)行了廣泛的掃描。在我對(duì)基本物理原理的理解和這些建議的基礎(chǔ)上,我認(rèn)為大型電動(dòng)機(jī)的額定電壓較低,通常與大型螺旋槳搭配使用,它們可以提升較大的負(fù)載,但不能很快改變速度,因此它們并不特別敏捷。較小的電動(dòng)機(jī)與較小的螺旋槳配對(duì)使用,盡管它們比較大的裝置敏捷得多,卻無法承受那么大的負(fù)載。此外,更大的螺旋槳將需要更大容量的電池。
大多數(shù)多旋翼飛機(jī)設(shè)置中使用的電池是鋰聚合物電池或LiPo電池。電池的容量由電流額定值乘以充電額定值確定。例如,在20C時(shí)額定為2200 mAh的電池將具有44000mAh的總?cè)萘俊?S數(shù)是電池中的每個(gè)電芯平均保持3.7 V的電芯數(shù)量。最常見的是保持11.1V的3S。大多數(shù)構(gòu)建版本將使用2-3S且在1200-2200 mAh之間。
您要研究的一些外圍設(shè)備包括IMU(故障測(cè)量單元)和無線接收器/收發(fā)器。 IMU是通常包括陀螺儀,高度計(jì)和指南針的設(shè)備。陀螺儀測(cè)量旋轉(zhuǎn)速度,指南針測(cè)量方位,高度計(jì)測(cè)量從給定參考點(diǎn)到多旋翼飛機(jī)的高度。對(duì)于無線接收器/收發(fā)器,或所謂的rx/tx,可以是與控制器配對(duì)的任何無線模塊。我們使用了藍(lán)牙模塊,該模塊連接到作為控制器的android應(yīng)用程序。盡管該解決方案的成本很小,但您需要將控制它的應(yīng)用程序放在一起。 Google Play上有可用的示例,同樣,Reddit是一個(gè)不錯(cuò)的資源,但是您需要確保該應(yīng)用程序和飛行控制器以相同的格式發(fā)送消息。我將在后面的部分中對(duì)此進(jìn)行更詳細(xì)的討論。
步驟2:ESC,飛行控制和功率分配
本節(jié)將簡(jiǎn)要概述如何連接ESC和如何控制ESC。使用單個(gè)電動(dòng)機(jī)輸出的四軸飛行器。
使用無刷電機(jī)時(shí),首先要注意的是,共有三行,并且它們都是相同的顏色。沒有您的商品沒有缺陷;這是設(shè)計(jì)使然。 ESC的工作方式與磁懸浮類似。運(yùn)動(dòng)是由電磁鐵以高速率打開和關(guān)閉而產(chǎn)生的。線路的連接順序?qū)⒋_定電動(dòng)機(jī)是順時(shí)針還是逆時(shí)針旋轉(zhuǎn)。并且,您可以通過將任意兩條線切換到ESC來反轉(zhuǎn)旋轉(zhuǎn)方向。
當(dāng)ESC通電時(shí),每個(gè)ESC上應(yīng)有一些LED指示燈以恒定速率閃爍。我不確定閃爍速率的重要性,不同的速率可能表示電池中電池的電量不同,即,當(dāng)電池電量較低時(shí),LED會(huì)更快閃爍;不過,那只是猜測(cè)。
通常情況下,ESC設(shè)計(jì)為將脈沖寬度調(diào)制(PWM)信號(hào)接收到數(shù)據(jù)引腳(白色)中。生成該信號(hào)可以由飛行控制器處理,并可以通過隨附的軟件進(jìn)行修改。如果您使用標(biāo)準(zhǔn)的微控制器來控制多旋翼飛機(jī),那么您將在代碼中顯式地控制PWM。這將包括計(jì)時(shí)器和中斷的使用,我將在審查Hydra-X PAC 5210時(shí)進(jìn)行討論。
我購(gòu)買的電池確實(shí)很漂亮:
http://amzn。 to/1FGu9qa
這是兩包,我在銷售時(shí)就買到了。他認(rèn)為減少兩次航班之間的停機(jī)時(shí)間將是一件好事。整潔的是Venom電池隨附的通用插頭系統(tǒng)。大多數(shù)電池需要4mm的子彈頭連接器或類似的東西,但是“通用插頭系統(tǒng)”使Venom電池可以適應(yīng)幾種不同類型的插頭。話雖如此,大多數(shù)ESC設(shè)計(jì)用于子彈連接器。如果您要獲得套件,則將處理所有這些細(xì)節(jié),但是如果您想組裝一架多軸直升機(jī),則需要做一些額外的研究,并確保您有足夠的電池和可連接的電調(diào)它沒有太多麻煩。對(duì)于大多數(shù)人來說,您只需要一些基本的焊接技巧,盡管您將要確保無需使用過多的焊料就能獲得牢固的連接。
如果您使用的是預(yù)先構(gòu)建的飛行控制器,偏航/俯仰/等應(yīng)該已經(jīng)在控制器中進(jìn)行了編碼。如果您決定設(shè)計(jì)自己的飛行控制器,則上面的最后一張圖片描述了將在每個(gè)軸上產(chǎn)生運(yùn)動(dòng)的四個(gè)電動(dòng)機(jī)之間的速度差。
如果電動(dòng)機(jī)1是北方,電動(dòng)機(jī)2是東方,電動(dòng)機(jī)3是南,電動(dòng)機(jī)4是西,則:
向前傾斜是俯仰=電動(dòng)機(jī)3-電動(dòng)機(jī)1;例如,對(duì)于增加的螺距,電動(dòng)機(jī)3》電動(dòng)機(jī)1
逆時(shí)針旋轉(zhuǎn)是Yaw =(電動(dòng)機(jī)2 +電動(dòng)機(jī)4)-(電動(dòng)機(jī)3 +電動(dòng)機(jī)1);例如,電動(dòng)機(jī)2,電動(dòng)機(jī)4》電動(dòng)機(jī)1,電動(dòng)機(jī)3
順時(shí)針旋轉(zhuǎn)為Roll =電動(dòng)機(jī)4-電動(dòng)機(jī)2;
您需要確定導(dǎo)致電機(jī)速度發(fā)生明顯變化。對(duì)于我的設(shè)置,將脈沖寬度更改為0.2毫秒是最小的明顯更改。
步驟3:Hydra X PAC5210
本節(jié)將簡(jiǎn)要概述PAC以及定時(shí)器和中斷的使用。
在這里我想重申一下,我在嵌入式系統(tǒng)上的所有經(jīng)驗(yàn)都是在Arduino micro上進(jìn)行的,因此我告誡讀者注意,我的觀點(diǎn)不是行業(yè)專家甚至是經(jīng)驗(yàn)豐富的開發(fā)人員。話雖如此,我是一個(gè)業(yè)余修修補(bǔ)補(bǔ)者,對(duì)馬克斯·羅伊克羅夫特(Max Roycroft)和何塞·奎諾斯(JoseQuino?es)所做的寶貴努力表示感謝,他們?cè)趨f(xié)助自己和我的團(tuán)隊(duì)以及與德克薩斯大學(xué)達(dá)拉斯分校合作舉辦HydraX競(jìng)賽方面做出了寶貴的努力。希望這場(chǎng)比賽將成為更多活動(dòng)的基礎(chǔ),使更多的活動(dòng)參與其中,并使學(xué)生和行業(yè)專業(yè)人士見面并交流。
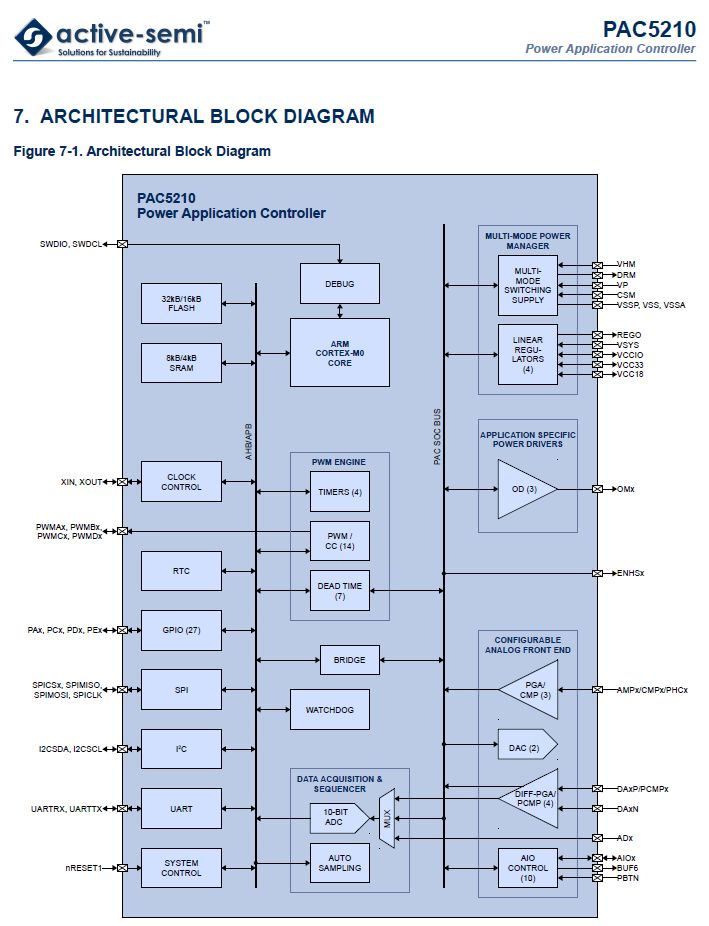
Hydra-X10是配備PAC5210微控制器的開發(fā)平臺(tái)。 PAC5xxx系列設(shè)備就是我們所謂的Power Application微控制器。與所有其他微控制器相比,Active-Semi的這一系列控制器旨在在高達(dá)52V的輸入上運(yùn)行。這意味著,用戶可以驅(qū)動(dòng)將近52V的設(shè)備負(fù)載。它具有37個(gè)通用I/O引腳,其中包括14個(gè)啟用PWM的引腳和11個(gè)具有模數(shù)轉(zhuǎn)換的模擬引腳,其中兩個(gè)具有數(shù)模轉(zhuǎn)換功能以及一些我不熟悉的功能。
不過,評(píng)估設(shè)置確實(shí)有一些怪癖。 HydraX10平臺(tái)設(shè)計(jì)為默認(rèn)在至少16V的電壓下運(yùn)行,這是因?yàn)槠潆娐吩试S最大52V的電壓。用戶手冊(cè)中提供了“低壓”模式并進(jìn)行了描述,但是該模式仍然需要12V的電壓才能運(yùn)行,這意味著您將需要一個(gè)外部電源才能開始對(duì)其進(jìn)行修補(bǔ)。在我決定使用哪種電池之前,這對(duì)我來說很麻煩。當(dāng)然,只有在訂購(gòu)?fù)赀@些組件之后才能開始測(cè)試,但是我希望能夠在不尋找電源的情況下自行修改電路板本身。公平地說,如果我剛剛?cè)ベ?gòu)買必要的連接器,一對(duì)串聯(lián)的9伏就足夠了。
無論如何,一旦板子通電,您就需要下載第三方CooCox IDE以及其CoLinkEx USB驅(qū)動(dòng)程序。 CooCox IDE存在一些重大的內(nèi)存問題,并且僅在關(guān)機(jī)時(shí)才進(jìn)行分配。這可能是Java的基本問題;我試圖堅(jiān)持自己。但是,這不是一個(gè)大問題,當(dāng)IDE不可避免地提示錯(cuò)誤,即內(nèi)存不足時(shí),只需關(guān)閉并重新打開它即可。
一旦平臺(tái)啟動(dòng)并初始化了IDE,下一個(gè)步驟是下載PAC5210控制器的庫。第一次啟動(dòng)IDE時(shí),它將要求您加載庫并列出它可以訪問庫的某些芯片和板。如果需要返回到此頁面,可以轉(zhuǎn)到“查看”下拉菜單,然后選擇“存儲(chǔ)庫”。在列表中尋找Active-Semi;它應(yīng)該在底部。如果未顯示,請(qǐng)單擊窗口右上方的刷新按鈕。單擊Active-Semi之后,選擇適當(dāng)?shù)目刂破鳎蝗缓髥螕簟按_定”。我正在使用PAC5210。您將需要的主要庫是“ CMSIS Core and BOOT”以及Active-Semi庫“ LIB”。下載并添加這些內(nèi)容后,您將擁有進(jìn)入下一部分的所有內(nèi)容。
第4步:計(jì)時(shí)器,PWM等。..
本節(jié)將討論如何使用PAC的時(shí)鐘和計(jì)時(shí)器來初始化PWM輸出。
PAC的一大特色是它具有大量的PWM輸出和數(shù)量。可用于運(yùn)行其他中斷驅(qū)動(dòng)功能的單獨(dú)計(jì)時(shí)器。控制器具有一個(gè)以4MHz運(yùn)行的振蕩器,并驅(qū)動(dòng)兩個(gè)獨(dú)立的時(shí)鐘,每個(gè)時(shí)鐘都可以由內(nèi)部PWM引擎中的四個(gè)定時(shí)器用作參考。該引擎使用計(jì)時(shí)器生成其14個(gè)PWM輸出。
在低電壓和高電壓模式下,該板均會(huì)生成5V,3.3V和1.8V輸出,以為外圍設(shè)備和組件供電。
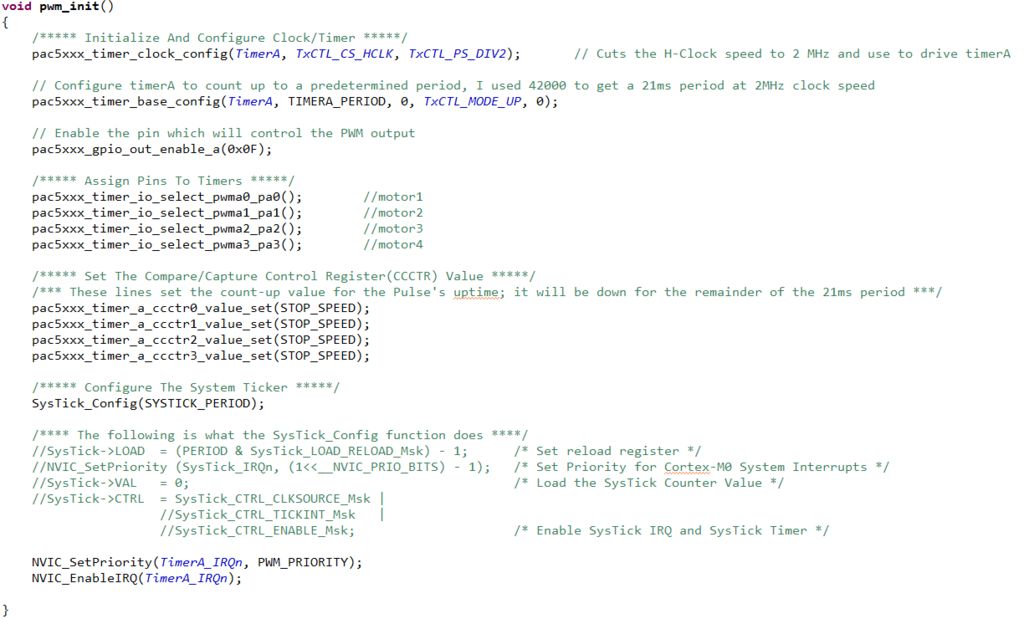
上面的圖片是我用來設(shè)置PWM輸出的代碼示例。您可以對(duì)timerB,C和D進(jìn)行相同的操作。也可以將HCLK或ACLK用于時(shí)鐘配置。而且時(shí)鐘輸入最多可被分頻為2 ^ 7。
您會(huì)注意到有一塊代碼引用了系統(tǒng)代碼。此股票代碼是一個(gè)內(nèi)部計(jì)時(shí)器,可用于定期觸發(fā)事件。我用它每10ms更新一次我所有電動(dòng)機(jī)的速度。 ESC每21 ms僅收到一個(gè)新的脈沖寬度,因此10ms速度更新應(yīng)始終及時(shí)更新PWM輸出。
步驟5:通信
本節(jié)將概述UART外設(shè)以及如何在PAC5210上設(shè)置rx/tx。
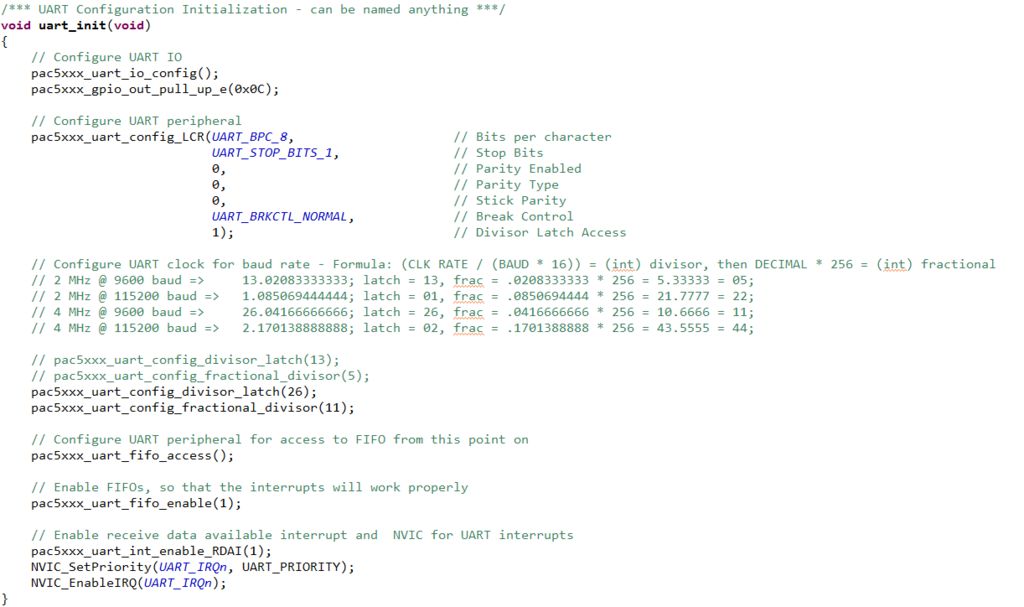
UART外設(shè)已連接到PE2和PE1板上的rx/tx端口。在此處連接RF接收器或藍(lán)牙模塊。該板默認(rèn)設(shè)置為將UART連接到USB,因此您可以在進(jìn)行無線通信之前調(diào)試通信代碼。 HydraX平臺(tái)中間有一塊,有4個(gè)開關(guān)。前兩個(gè)對(duì)應(yīng)于UART鏈接,并且通過更改這兩個(gè)開關(guān),可以使PE1和PE2與UART外設(shè)通信。
上面的第一張圖片顯示了我用于配置UART的代碼。我還有一些鎖存器和分?jǐn)?shù)除數(shù)的示例計(jì)算,用于描述UART外設(shè)的系統(tǒng)配置。
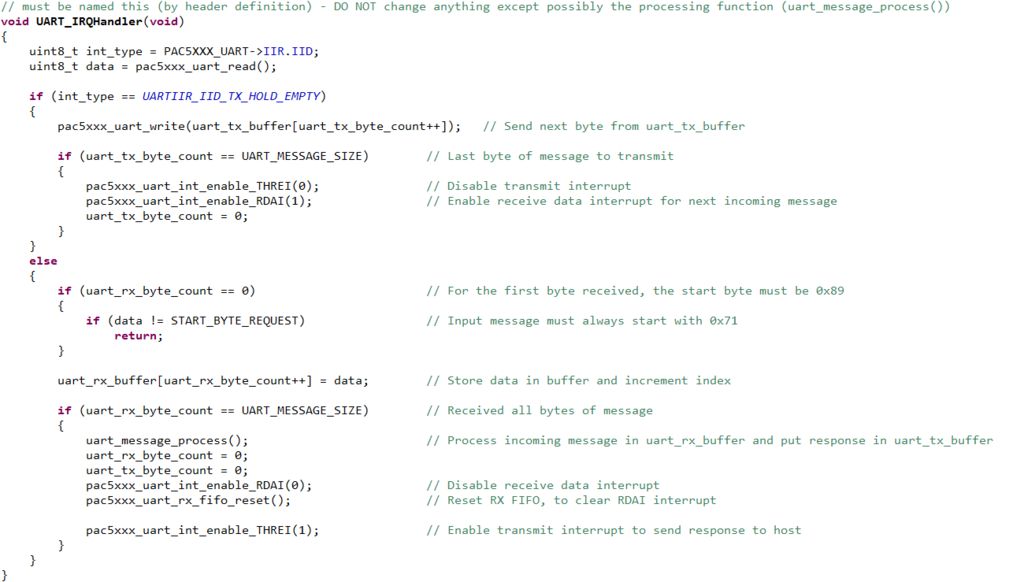
配置完成后,您需要定義一個(gè)處理程序,只要觸發(fā)UART中斷,該處理程序就會(huì)被調(diào)用。它的名稱必須定義為:void UART_IRQHandler(void)。這是觸發(fā)UART中斷時(shí)系統(tǒng)尋找的東西。下一張圖片顯示了Max指導(dǎo)我的更多代碼。
最后一步是編寫處理輸入消息的函數(shù)。在上面的代碼中,此函數(shù)稱為uart_messgae_process(),但可以命名為任何東西。您將需要具有一個(gè)開關(guān)或某些其他流控制結(jié)構(gòu),這些結(jié)構(gòu)將根據(jù)接收到的數(shù)據(jù)唯一地執(zhí)行。在處理結(jié)束時(shí),您應(yīng)該生成一條返回消息以提供有關(guān)所發(fā)生情況的反饋。傳入和傳出消息都應(yīng)具有一個(gè)“開始消息”字節(jié),該字節(jié)告訴哪個(gè)設(shè)備正在接收消息的開始位置。接下來,應(yīng)該包括狀態(tài)消息,然后是要發(fā)送的任何數(shù)據(jù)。最后,應(yīng)采用某種數(shù)據(jù)驗(yàn)證/確認(rèn)方法以確保傳輸在途中不被破壞。我使用消息的8位總和作為校驗(yàn)和,并將其保存在消息的最后一個(gè)字節(jié)中。
通信的下一部分是將無線收發(fā)器設(shè)置為在收發(fā)器中發(fā)送和接收消息。 UART代碼中描述的格式。有很多可用于編寫藍(lán)牙應(yīng)用程序的指南,大多數(shù)收發(fā)器消息處理與UART消息處理類似,因此,我將由您自定義該部分。
步驟6:結(jié)束構(gòu)建
安裝了所有軟件后,剩下的就是電路了。評(píng)估套件隨附一個(gè)原型板,可用于在連接到HydraX平臺(tái)之前確定連接方向。
請(qǐng)注意:HydraX平臺(tái)沒有緩解電流過載的電路,因此您需要確保所有連接線都已妥善存放,以防止輸入和輸出意外交叉。如果您確實(shí)收到了簡(jiǎn)短的提示,那么董事會(huì)就死定了。我建議不要再加電。某些組件可能是從油炸板上搶下來的。
當(dāng)然,在進(jìn)行連接之前,您需要確定要使用的引腳。請(qǐng)記住,多軸直升機(jī)很容易受到其重心變化的影響,因此您要確保每個(gè)組件盡可能地平衡。修剪電線,直到結(jié)構(gòu)緊湊,不會(huì)對(duì)多旋翼飛機(jī)周圍的氣流產(chǎn)生負(fù)面影響。最后但并非最不重要的一點(diǎn)是,貼花,玩得開心,并準(zhǔn)備打動(dòng)所有女士,因?yàn)槟谐岚颍∑渲兴膫€(gè)。
責(zé)任編輯:wv
-
四軸飛行器
+關(guān)注
關(guān)注
55文章
207瀏覽量
52740
發(fā)布評(píng)論請(qǐng)先 登錄
芯片電感/半導(dǎo)體模組磁性元器件在低空飛行器領(lǐng)域的應(yīng)用范圍及其作用
低空飛行器(如eVTOL、物流無人機(jī)、城市空中交通飛行器)的適航認(rèn)證

浙江鋒鋰低空飛行器電池解決方案亮相2025亞洲通用航空展
第四屆飛行器健康管理技術(shù)國(guó)際高端論壇暨青年科學(xué)家論壇:昊衡科技,歡迎您來!

四軸無人機(jī)是如何工作的?

深圳反重力科技純電動(dòng)單人智能飛行器完成首次試飛
30%空間壓縮奇跡:組合泵如何重塑飛行器動(dòng)力系統(tǒng)布局邏輯

為什么三軸MEMS陀螺儀是無人機(jī)飛控系統(tǒng)的核心傳感器?

eVTOL低空飛行器電機(jī)為什么要用自粘結(jié)鐵芯方案?
小馬哥STM32F1主控720空心杯四軸飛行器資料(包含源代碼和相關(guān)教程)
小馬哥STM32F1主控720空心杯四軸飛行器資料(包含源代碼和相關(guān)教程)
小型飛行器專用 AS-DR01模擬信號(hào)AI識(shí)別跟蹤模塊

《手把手教你做星閃無人機(jī)—KaihongOS星閃無人機(jī)開發(fā)實(shí)戰(zhàn)》系列課程課件匯總




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論