") 微型四軸飛行器DIY圖解
微型四軸飛行器DIY圖解

第1步:零件清單

您需要以下部件:
- 飛行控制器:我使用的是Matek F411-mini。您可以使用任何所需的飛行控制器。請記住,對于WifiPPM,您需要至少300mA的3V電壓,對于3D相機,需要至少500mA的5V電壓。
- 15A ESC
- 4 x 1104無刷電機
- 2435用于90mm機架的4個葉片螺旋槳,用于82mm機架的2030個3葉片螺旋槳或用于109mm機架的3020個2葉片螺旋槳
- WIFIPPM或任何其他接收器(與instructable不同我現在使用帶有外置天線的ESP07)
- 用于Android的Lowcost 3d FPV攝像頭(我添加了新的3D打印凸輪架和VTX支架)
- GY63 Baro if你想添加高度保持模式(在我的構建中從未令人滿意)
- 如果您想使用它,請使用小蜂鳴器。我用它作為電池警告。
- 2S電池。我使用的是1000mAh LiPo。
- 電池連接器
- 一些小塑料墊片,螺母和螺絲
- 來自ebay的長20mm M2塑料吸頭
- 3D打印框架,支撐桿和支架
- 用于固定電池的一些橡膠帶
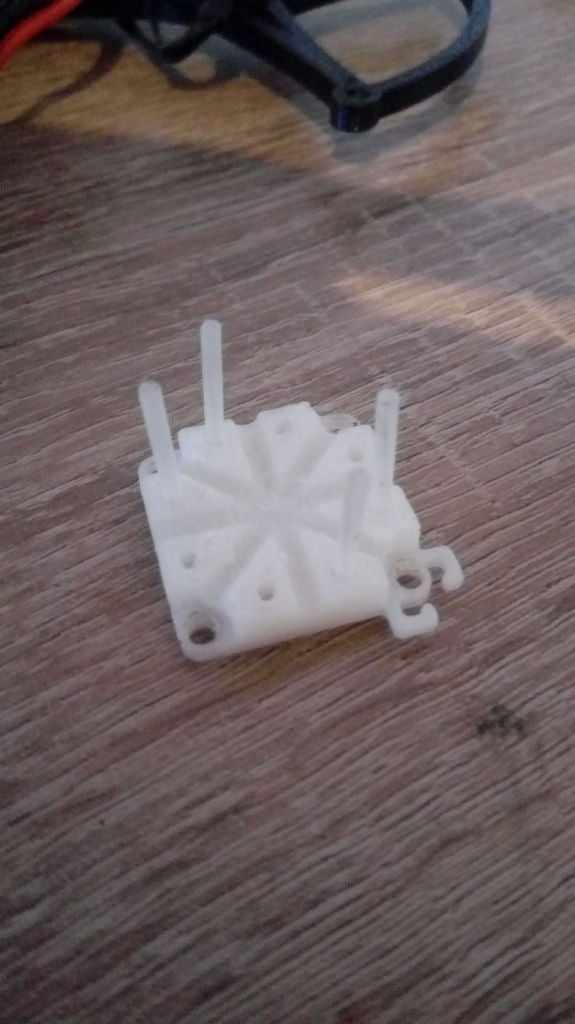
步驟2:打印框架和支柱警衛(wèi)
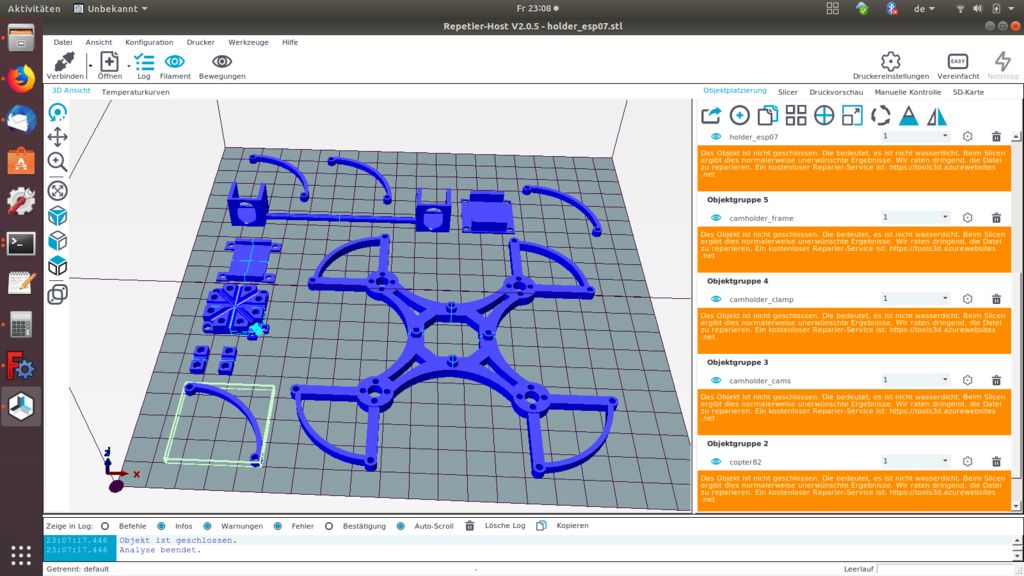
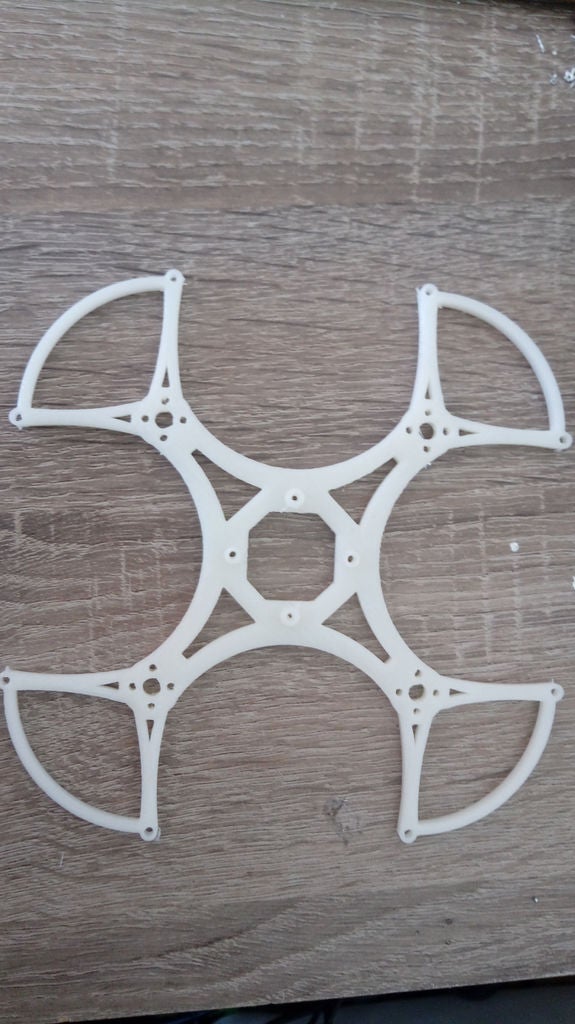
第一步是所有部分。我使用PLA配有0.3mm噴嘴和50%填充物。
我添加了三種不同的框架尺寸。 82毫米的框架非常小,但飛行時間只有3分鐘左右,推力幾乎太低。 90毫米的框架是飛行時間和尺寸之間的最佳折衷。飛行時間約為5分鐘。推力還可以。 109毫米的機架具有最佳的飛行時間(約7分鐘)和最佳推力,但缺點是尺寸。
我還為3D攝像機增加了一個新的凸輪架,還為VTX和ESP8266增加了一些支架。 。
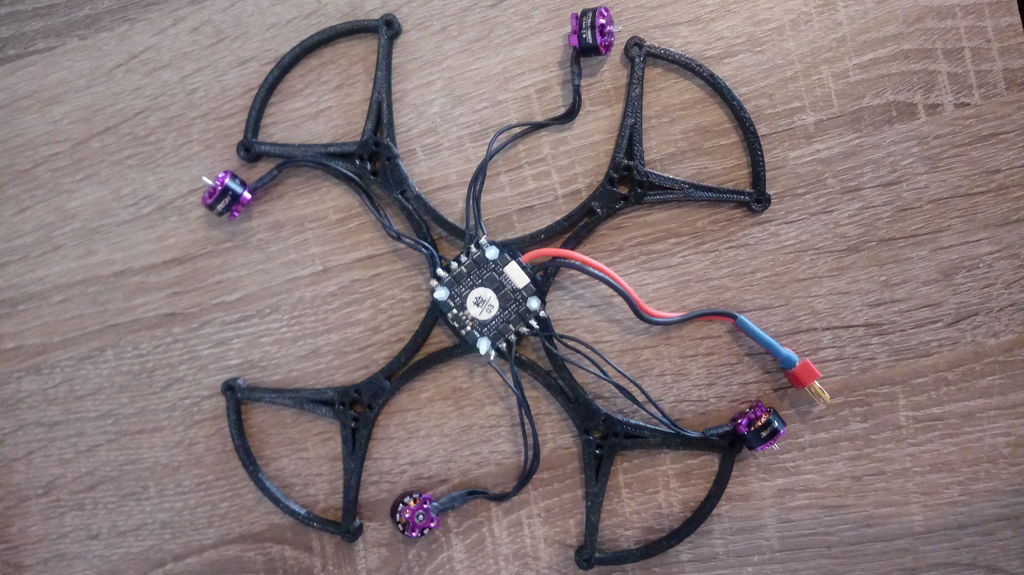
步驟3:添加ESC和電機


在您繼續(xù)之前,您應該已經完成了“WIFIPPM”和“適用于Android的低成本3D FPV攝像機”。
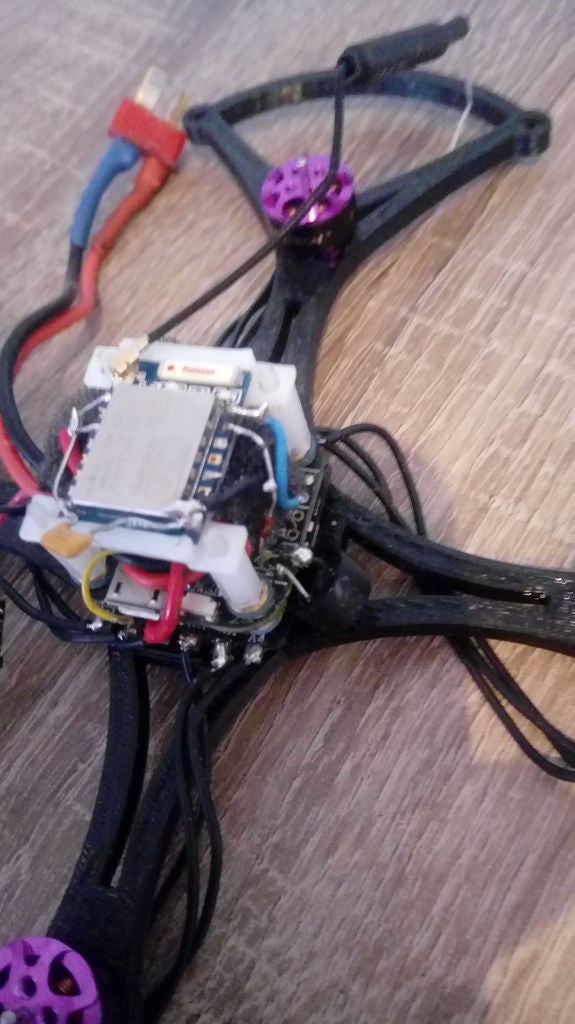
將所有四個電機添加到框架中。然后將ESC添加到框架中。使用M2x20塑料螺絲和M2螺母。現在將電機連接到ESC,如第一張和第二張圖片所示。電機的方向將在稍后調整。將電源插頭添加到ESC的電源線,如第三張圖所示。
步驟4:將電子設備添加到飛行控制器
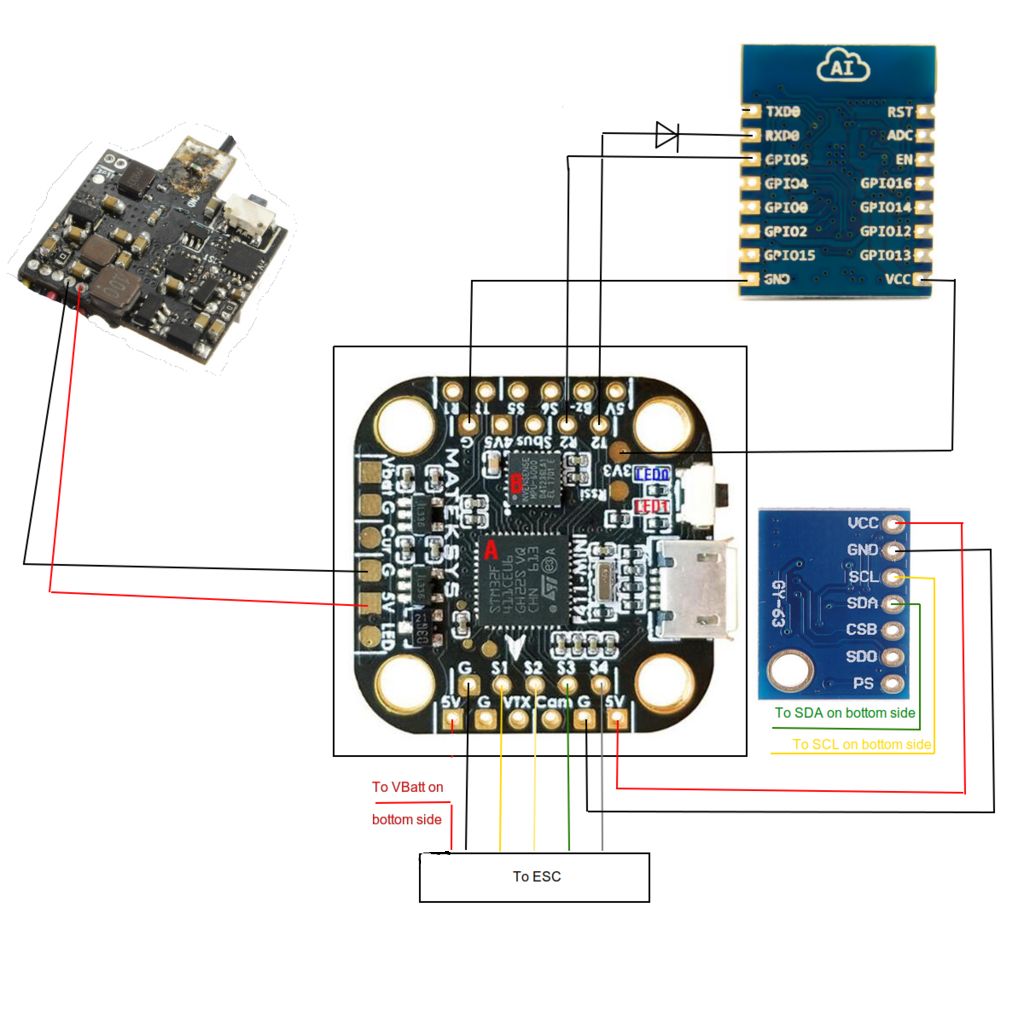
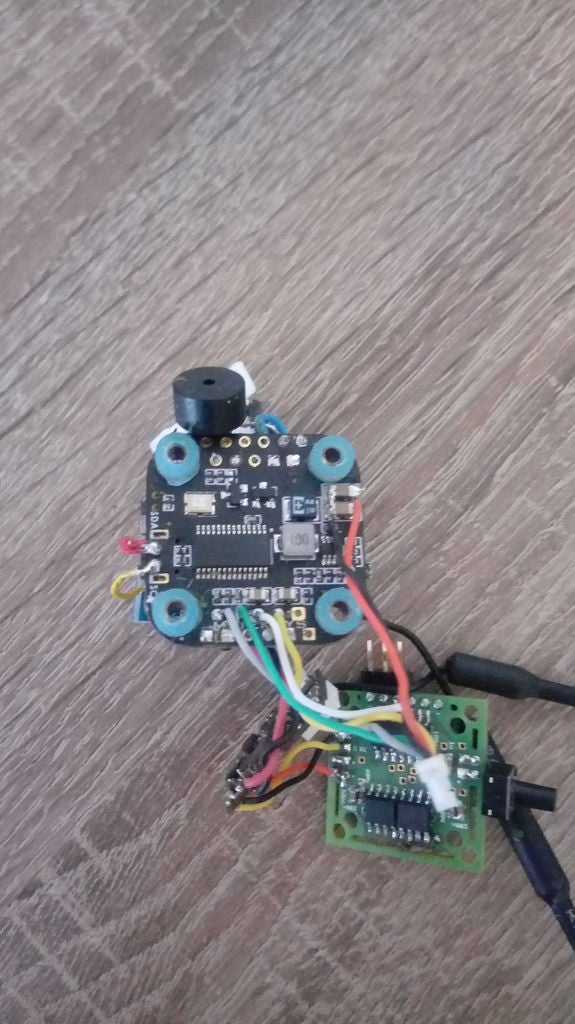

現在將ESC電纜焊接到飛行控制器上。 USB插頭應位于連接的另一側。您可以在第一張圖片中看到連接。
S1 - 》黃色S2 - 》白色S3 - 》綠色S4 - 》灰色G - 》黑色VBAT - 》紅色我將VBAT和GND連接到電容器,因為連接焊盤位于另一側。
將硅和黃銅墊圈添加到飛行控制器。
如果要使用它,請?zhí)砑觔aro。 SDA和SCL也位于電路板的底部。 + 5V和GND位于頂部。
現在連接WifiPPM。將PPM輸出連接到飛行控制器的RX2。將WIFIPPM的+ +連接到3.3V,GND連接到G.我還在飛行控制器的TX上添加了一個二極管到ESP8266的RX,因為我現在用后向通道和MSP協(xié)議進行了一些測試。您不需要這個。
使用VTX添加3d攝像頭并將+連接到+ 5V并將GND連接到G.
如果您使用蜂鳴器也將其添加到蜂鳴器
現在你把所有的電子設備放在一起。
第五步:把所有東西放在一起

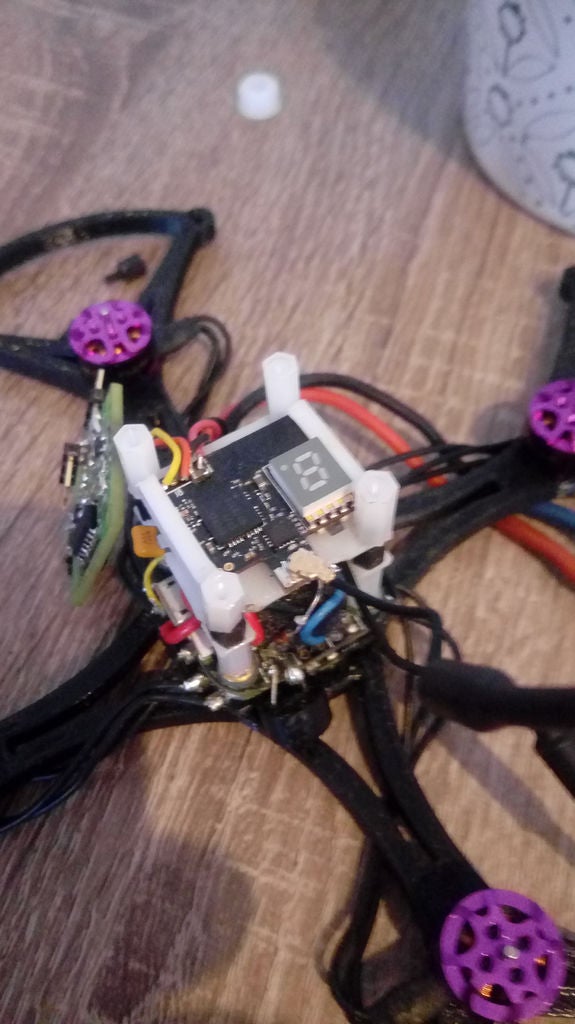


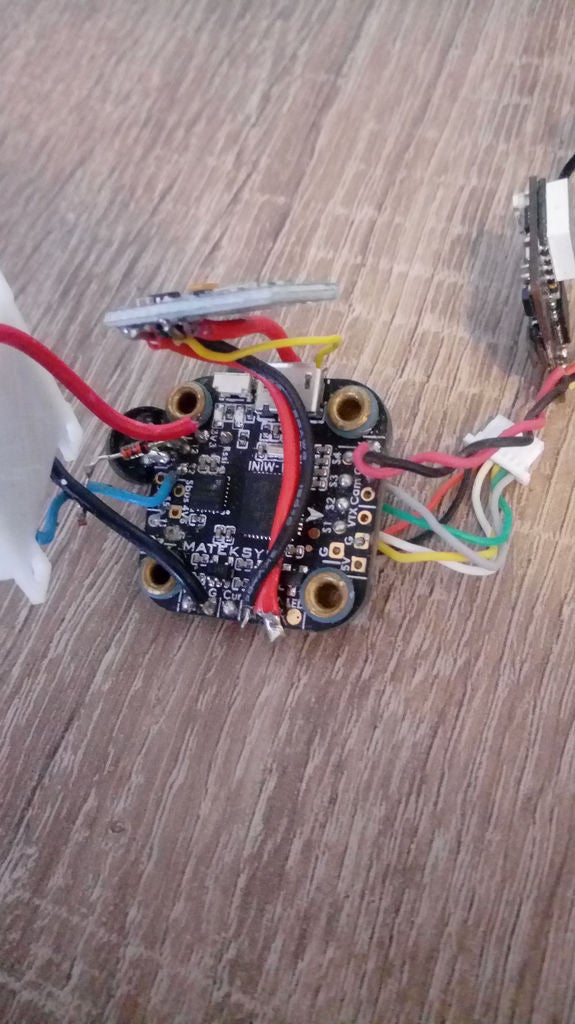
將電纜連接到ESC插頭,并將飛行控制器放在ESC頂部。前箭頭應指向ESC插頭的方向。放一些較長的墊片來固定飛行控制器。如果您不使用baro,可以使用短墊片。 (第一張圖片)
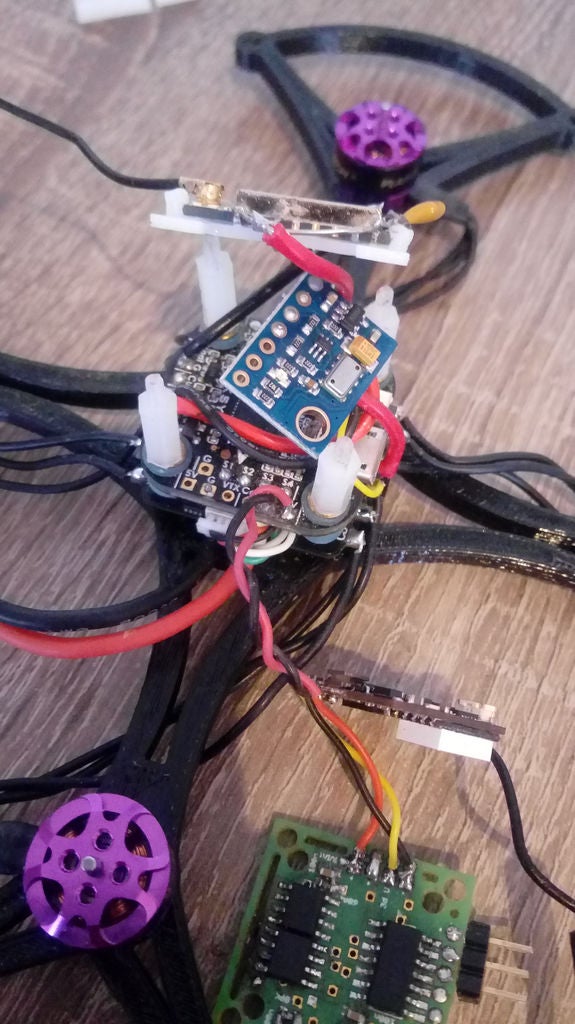
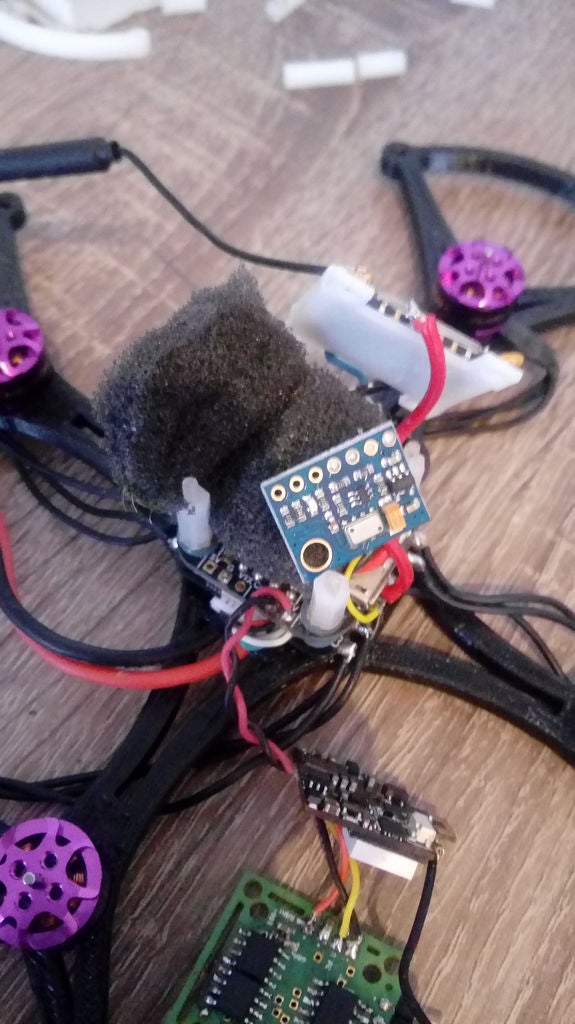
現在在baro周圍放一些泡沫以消除空氣流動。把baro放在ESC的頂部。它沒有用任何螺釘固定。它只是由泡沫和它頂部的支架固定。 (第二張和第三張圖片)
然后將ESP8266放入其印刷支架并將其放在上面。用一些短的墊片修復它。你也可以添加一個外置天線以獲得更好的射程。(第四張圖片)
在它的頂部放上VTX和它的印刷支架,再放一些長的墊片。 (第五張圖片)
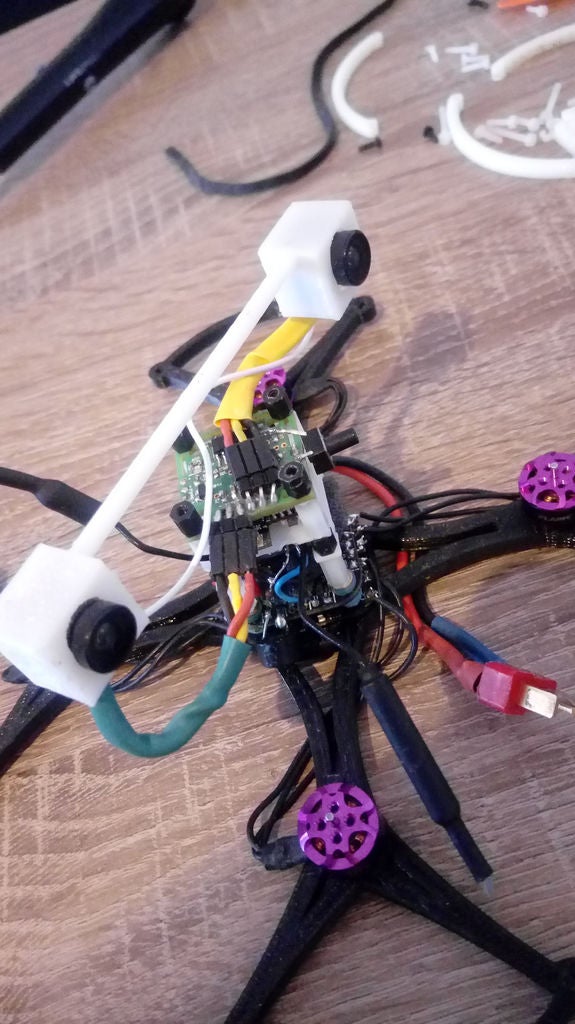
現在將三維凸輪的電路板放在上面并再放一些短墊片。 (第六張和第七張圖片)
最后一張是3d打印的凸輪盤。首先放入一些長螺釘,如第八張圖片,然后將其固定在頂部并用凸輪架固定兩個攝像機。
現在你的直升機差不多完成了。我們進行調整。
步驟6:配置Betaflight

現在是時候進行配置了。如果您尚未安裝betaflight配置程序,請從此處下載并安裝它。 Fore Baro模式您必須安裝并清除Cleanflight。 Betaflight不支持它。
通過USB將飛行控制器連接到計算機并啟動betaflight配置器。點擊連接。
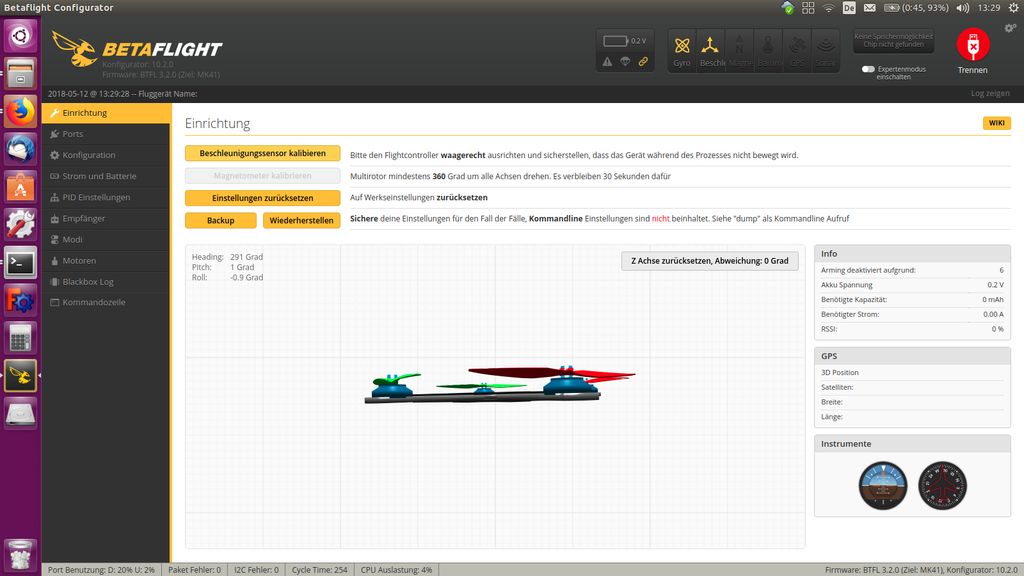
在第一個標簽中,您可以調整傳感器。要執(zhí)行此操作,請調平直升機并單擊校準。
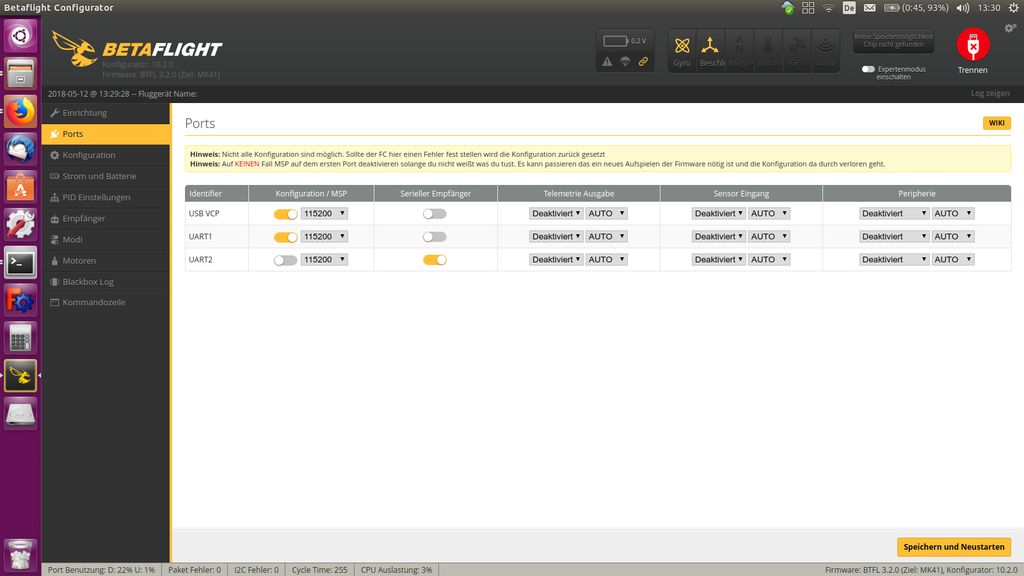
在第二個選項卡中,您可以配置串行端口。保持USB端口不變。將UART2設置為串行接收器。你可以像現在這樣離開UART1。我把它調整為MSP,因為我現在正在使用MSP協(xié)議進行一些測試。
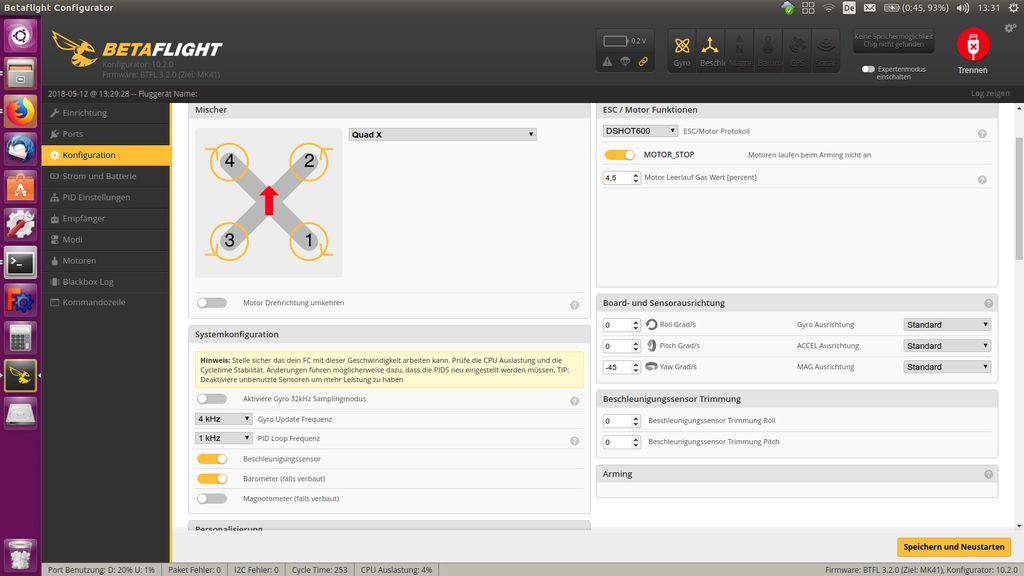
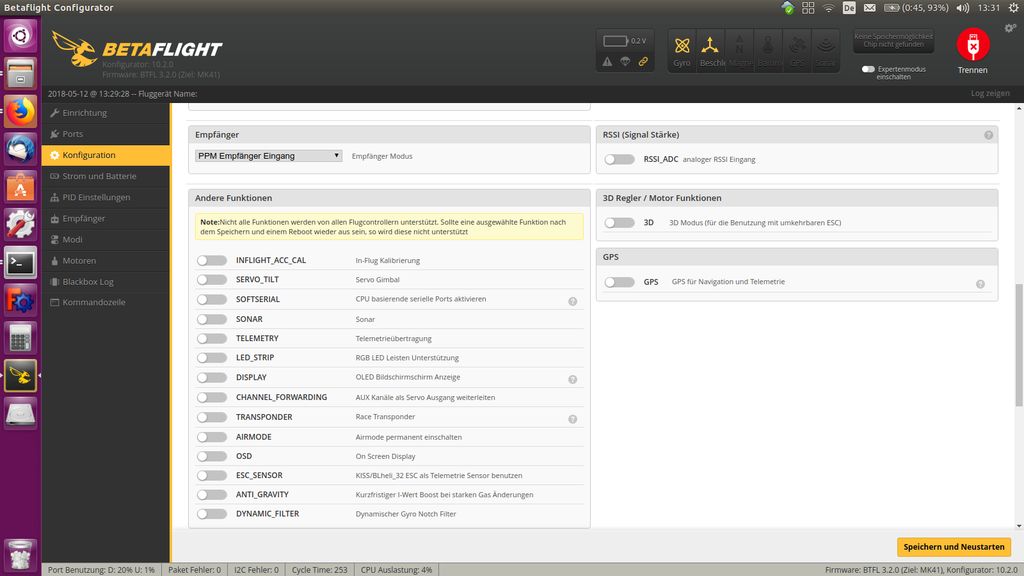
在下一個選項卡中,您可以配置直升機。把它放到Quad X和DShot600上。我總是打開電機停止,因為我希望在沒有油門的情況下關閉電機。您還必須將電路板方向調整為YAW -45°。接收器必須調整到PPM接收器。您可以保留其余部分。
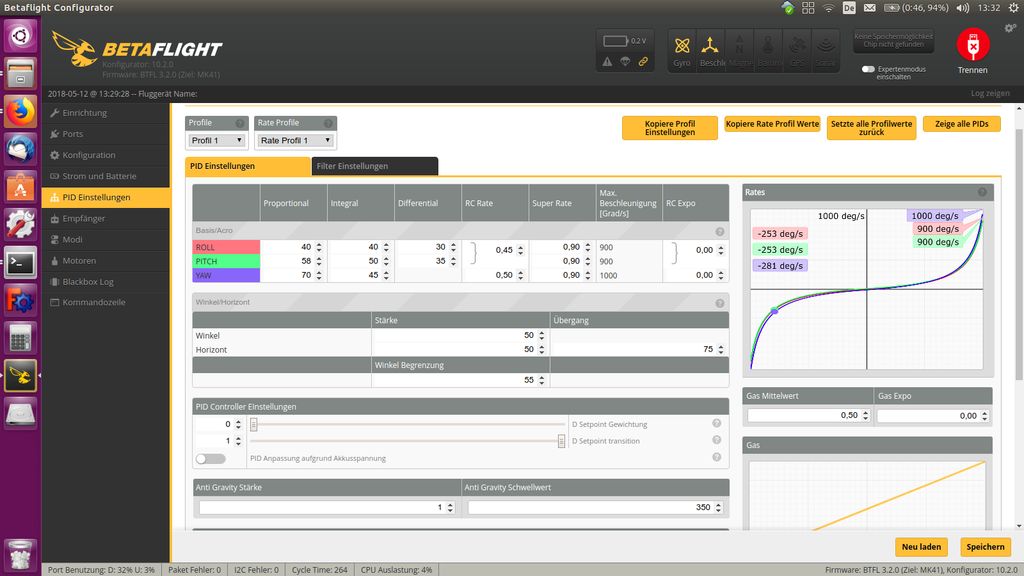
在PID選項卡中,您可以調整PID參數和桿的靈敏度。我稍微降低了靈敏度。 PID調整應適用于第一次飛行。您可以稍后對其進行優(yōu)化。
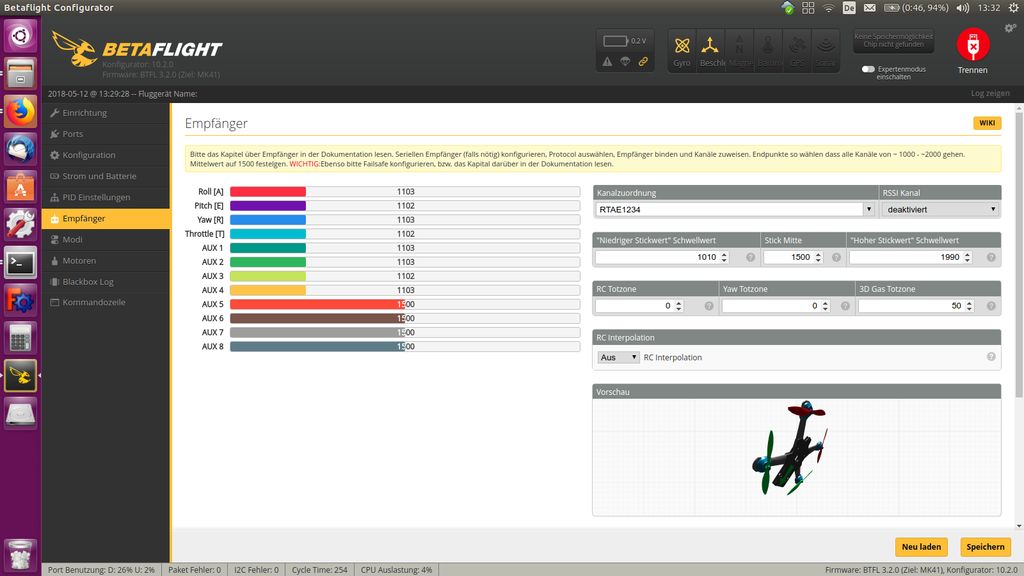
下一個選項卡是接收器選項卡。將通道映射調整為RTAE1234。將最低粘貼值調整為1010,將中心粘貼值調整為1500,將最高粘貼值調整為1990.如果您將智能手機連接到WIFIPPM并在瀏覽器中加載地址192.168.4.1,則可以測試您的接收器。
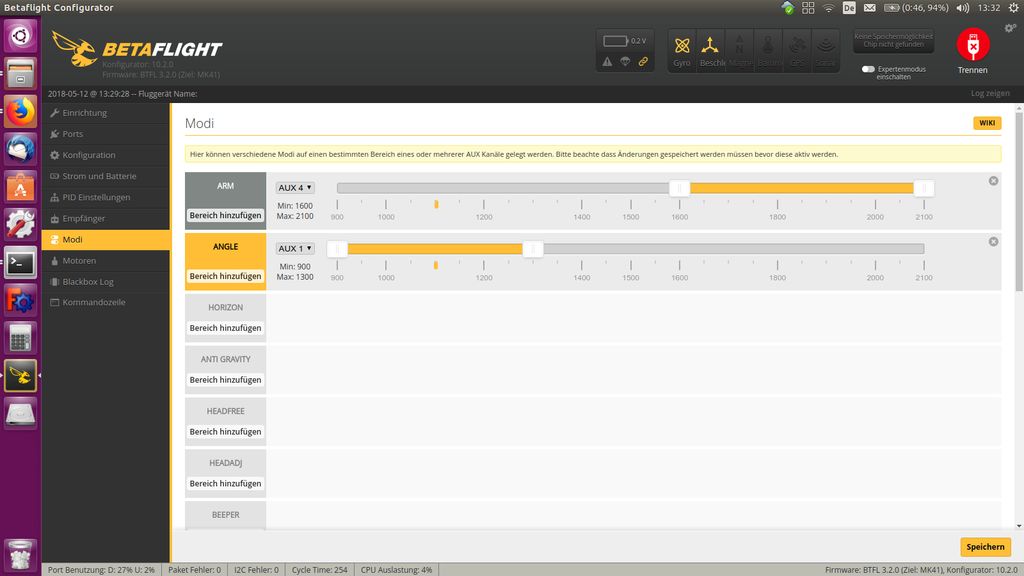
如果接收器工作正常,您可以進入“模式”選項卡。我已經在AUX4和AUX1上的飛行模式下布防了。我還在AUX3上調整了Baro模式(只有清潔飛行,必須連接電池才能識別baro傳感器)
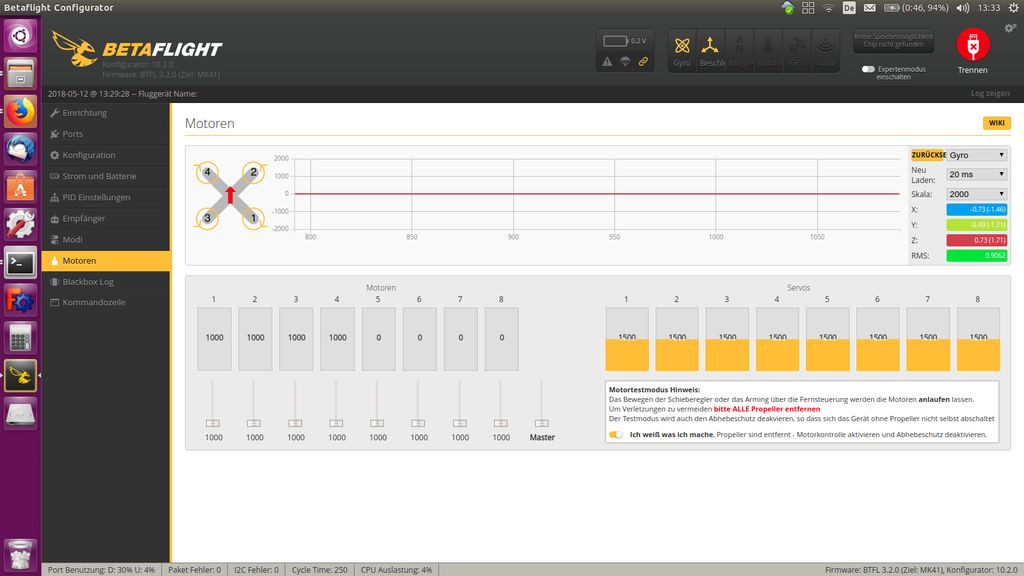
現在轉到電機選項卡。插上電池并點擊“我知道我在做什么”。測試電機的方向。它應該像左上角的圖表一樣。如果電機方向錯誤,請拔下電池插頭,斷開USB電纜并更換電機的兩根電線。然后再試一次。當電機方向正常時,配置完成。
步驟7:測試你的直升機

現在你可以添加螺旋槳,橡膠帶,以保持電池和支柱防護。再次仔細檢查所有內容并連接電池。連接到WIFIPPM并嘗試先飛行而不使用FPV。然后再次檢查視頻流是否正在使用電機。如果您有電機的視頻失真,請再次檢查接線。嘗試將3d fpv相機的所有電線盡可能遠離電源線。當一切正常時,你可以開始FPV飛行。
-
四軸飛行器
+關注
關注
55文章
207瀏覽量
52740
發(fā)布評論請先 登錄
芯片電感/半導體模組磁性元器件在低空飛行器領域的應用范圍及其作用
低空飛行器(如eVTOL、物流無人機、城市空中交通飛行器)的適航認證

浙江鋒鋰低空飛行器電池解決方案亮相2025亞洲通用航空展
第四屆飛行器健康管理技術國際高端論壇暨青年科學家論壇:昊衡科技,歡迎您來!


深圳反重力科技純電動單人智能飛行器完成首次試飛
30%空間壓縮奇跡:組合泵如何重塑飛行器動力系統(tǒng)布局邏輯

為什么三軸MEMS陀螺儀是無人機飛控系統(tǒng)的核心傳感器?

eVTOL低空飛行器電機為什么要用自粘結鐵芯方案?
小馬哥STM32F1主控720空心杯四軸飛行器資料(包含源代碼和相關教程)
小馬哥STM32F1主控720空心杯四軸飛行器資料(包含源代碼和相關教程)
小型飛行器專用 AS-DR01模擬信號AI識別跟蹤模塊

《手把手教你做星閃無人機—KaihongOS星閃無人機開發(fā)實戰(zhàn)》系列課程課件匯總




 工商網監(jiān)
工商網監(jiān)
評論