 關于通過深度學習車輛檢測的相關研究
關于通過深度學習車輛檢測的相關研究

目標檢測是指在圖像和視頻中對目標進行定位和分類。
在本節中,我將通過一個車輛檢測示例,介紹如何使用深度學習創建目標檢測器。相同步驟可用于創建任何目標檢測器。
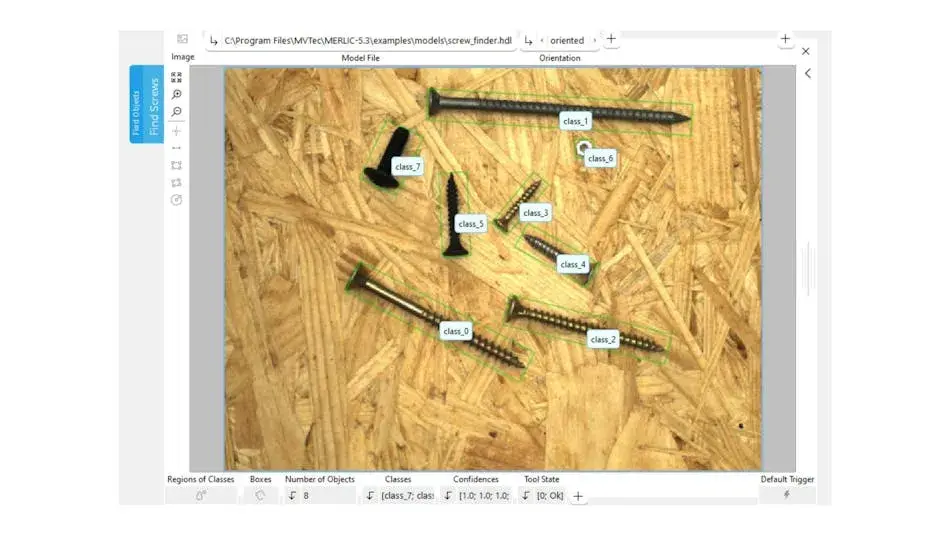
下圖顯示了一個三類車輛檢測器的輸出結果,檢測器對每一種類型的車輛進行了定位和分類。
對不同類型車輛進行定位和分類的車輛檢測器顯示的輸出結果。
在創建車輛檢測器之前,我需要一組標注的訓練數據,這是一組用感興趣目標的位置和標簽標注的圖像。更具體地說,是需要有人對每幅圖像或視頻幀進行篩選,并對所有感興趣目標的位置進行標注。這個過程稱為“真值標注”。
真值標注通常是創建目標檢測器過程中最耗時的部分。下圖左側顯示的是原始訓練圖像,右側顯示的是經過真值標注的相同圖像。
原始輸入圖象(左)和經過地面實況標注的輸入圖象(右)。
可以想見,標注一組數量足夠大的訓練圖像數據集是一項極費人力的處理過程。為了減少數據標注時間,我使用了Ground Truth Labeler 自動駕駛系統工具箱,它可使地面實況標注過程實現部分自動化。
用于標注視頻和圖像數據的 Ground Truth Labeler 屏幕截圖。
實現標注過程部分自動化的一種方法是使用跟蹤算法。我使用的KanadeLucas Tomasi算法(KLT)是在實際應用中使用的第一種計算機視覺算法。KLT 算法將目標表示為一組特征點,然后逐幀跟蹤它們的移動位置。我們可以在第一幀中手動標注一個或多個目標,然后使用跟蹤算法標注視頻的其余部分。
Ground Truth Labeler 還允許用戶導入自己的算法進行自動化標注。
我見過的最常用的方法是,用戶導入自己現有的檢測器,再進行新數據標注,這可以幫助他們創建出更精確的檢測器。下圖演示了使用 Ground Truth Labeler 標注一系列圖像或視頻的工作流程。
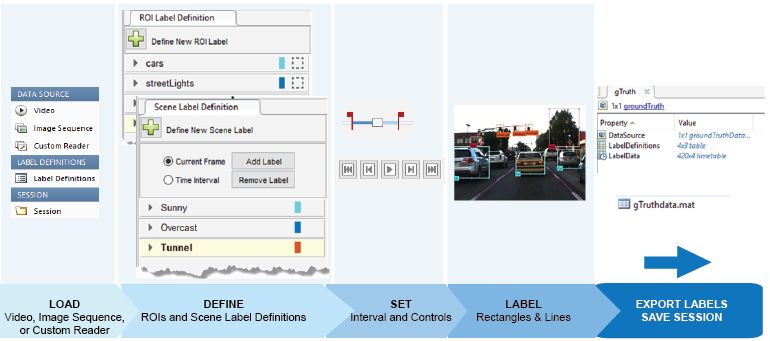
使用MATLAB進行自動真值標注的流程。
標注數據最終以 table 格式存儲,table 中列出了訓練集視頻中車輛在每個時間點的位置。真值標注完成后,我可以開始訓練車輛檢測器。
本例中,我估計真值標注過程最高可加速 119 倍。我們以每秒30幀的速度捕捉訓練視頻數據,每4秒對目標進行一次標注。這意味著我們將節省中間119幀的標注時間。當然這是最好的情況,因為我們有時還得花時間更正自動標注的輸出結果。
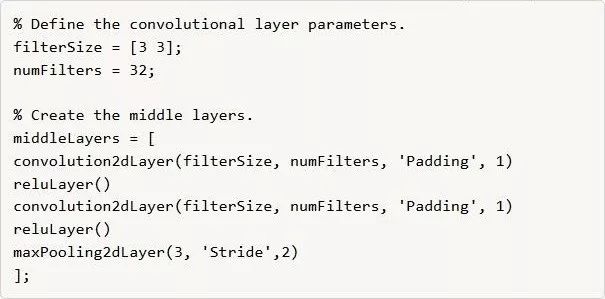
我們的車輛檢測器使用的是FasterR-CNN網絡。首先,定義一個網絡架構,如下面的MATLAB代碼片段所示。Faster R-CNN算法主要分析圖像的區域,因此輸入層比輸入圖像的預期尺寸要小。本例中,我選擇了一個32x32像素的窗口。輸入尺寸需要根據執行時間和希望檢測器解析的空間細節進行衡量。

中間層是網絡的核心構造塊,具有重復的卷積層、ReLU 層和池化層。
本例中,我只會使用幾個層。若要提高準確性,或者如果想要將更多的類并入檢測器中,可以重復這些使用層,創建一個更深的網絡。
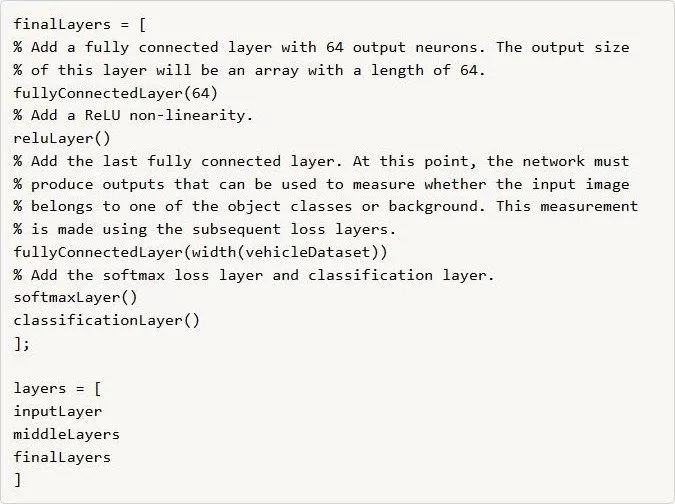
CNN 的最后一層通常是一組全連接層和一個 softmax loss 層。
在本例中,我在全連接層之間添加了一個 ReLU 非線性層,用以提高檢測器的性能,因為我們這個檢測器的訓練集并沒有我想要的那么大。
為訓練目標檢測器,我將 layers 網絡結構輸入 trainFasterRCNNObjectDetector 函數。如果您安裝了 GPU,算法會默認使用 GPU。如果不想使用 GPU 或者想使用多個 GPU,您可以在 trainingOptions(訓練選項)中調整 ExecutionEnvironment 參數。

完成訓練之后,可以在測試圖像上試一試,看看檢測器是否正常工作。我使用下面的代碼在單一圖像上測試檢測器。

Faster R-CNN車輛檢測器檢測到的邊界框和得分。
若確信自己的檢測器正常工作,我強烈建議您使用統計指標(例如,平均精度)在更大的一組驗證圖像集上進行測試。平均精度提供的單一分數可衡量檢測器進行正確分類的能力(準確率)以及檢測到所有相關對象的能力(召回率)。
-
檢測器
+關注
關注
1文章
932瀏覽量
49946 -
深度學習
+關注
關注
73文章
5599瀏覽量
124400
發布評論請先 登錄
雷達車輛檢測模組怎么選?


穿孔機頂頭檢測儀 機器視覺深度學習
如何深度學習機器視覺的應用場景
影像儀AI自動尋邊技術精準捕捉邊界測量,檢測效率翻倍!
如何在機器視覺中部署深度學習神經網絡
毫米之間定成敗:PCB背鉆深度設計與生產如何精準把控
大模型推理顯存和計算量估計方法研究
提高IT運維效率,深度解讀京東云AIOps落地實踐(異常檢測篇)
解鎖未來汽車電子技術:軟件定義車輛與區域架構深度解析
可智能深度學習的AI攝像機模組方案
行業首創:基于深度學習視覺平臺的AI驅動輪胎檢測自動化




 工商網監
工商網監
評論