 關于從指定方向圖合成陣列優化工作流程的分析
關于從指定方向圖合成陣列優化工作流程的分析

在那些使用傳感器陣列的應用中,例如 WLAN、LTE 和 5G 無線通信系統、相控陣雷達和聲信號波束成形系統,設計通常從滿足某些性能標準的陣列方向圖開始。這些標準包括諸如主瓣方向性和寬度、零位置和旁瓣電平之類的參數。
由于陣列通常包含數百甚至數千個陣元,因此可能需要多次迭代才能在產生期望方向上收斂到一個所需的方向圖。迭代需要時間,并且當需要考慮多個參數時難以徹底完成。
優化技術可以極大地提高陣列分析過程的效率。您可以通過一系列權重和陣元位置來評估一種方向圖,并且可以通過自動過程的每次迭代來評估已生成的方向圖與期望方向圖之間的差異。
本文介紹了一種工作流程,使用 Phased Array System Toolbox、Optimization Toolbox 和 Global Optimization Toolbox 的優化技術來提供解決方案。
設計選項和約束
為確保解決方案滿足設計指標,我們必須了解設計選項和優化過程中需要考慮的約束條件。
影響陣列形式的參數包括陣列中陣元的數量、陣元的晶格結構和陣列形式。在陣列內,與每個陣元相關聯的參數還確定了波束方向圖特征,包括應用于每個陣元(幅度或相位)的權重和陣元在陣列內的位置。這些參數可以用作“控制旋鈕”,滿足您想要的性能目標。
對于多元陣列,設計的自由度將根據最終應用的成本和復雜性而變化。例如,在最基本的系統中,僅幅度權重可用。然而,許多架構支持陣元或子陣列的復數加權,可提供幅度和相位控制。通過這種類型的架構,波束可以通過電子方式轉向和成形(圖 1)。
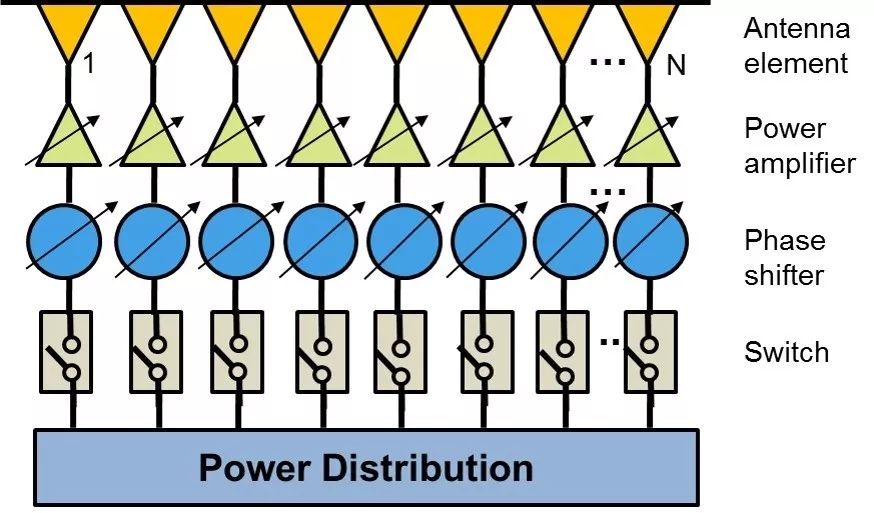
圖1:靈活的相控陣架構。
設計中的陣列形式通常由終端系統形狀因子的約束驅動,但各陣元之間的間距可以是靈活的。然而,這種靈活性通常受到實際制造條件的限制。例如,各陣元不能太靠近,否則將影響陣列的有效性。
為了說明如何將這些選項和約束納入優化工作流程,我們將提供兩個示例。在第一個示例中,我們使用具有均勻間距的 8 陣元線陣來生成一組陣元權重,重點是匹配已知方向圖。在第二個示例中,我們構建了一個面陣,其中陣元權重和陣元位置收斂,以實現一組陣列性能指標。也就是說,我們從權重擴展到陣元位置,展示如何通過將約束條件置于優化問題中,來塑造方向圖以滿足要求。
示例 1:僅優化權重
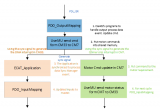
在這個例子中,我們將完成以下步驟(圖 2):
確定期望方向圖
開發一個代價函數,盡可能縮小起始方向圖和期望方向圖之間的距離
運行優化
使用生成的權重查看方向圖,并將其與期望方向圖進行比較
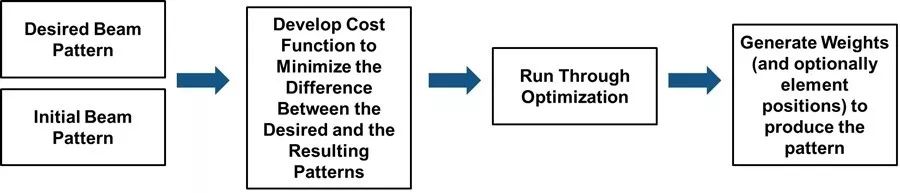
圖2:示例 1 的工作流程步驟。
我們從期望的 2D 方向圖 Beam_d 開始,該方向圖具有一組特定的方位角和仰角。然后構建一個成本函數,縮小期望方向圖 Beam_d 與加權向量 weight_o 生成的方向圖之間的距離。優化的初始條件基于均勻加權。此方向圖包含在以下代碼的目標函數中。
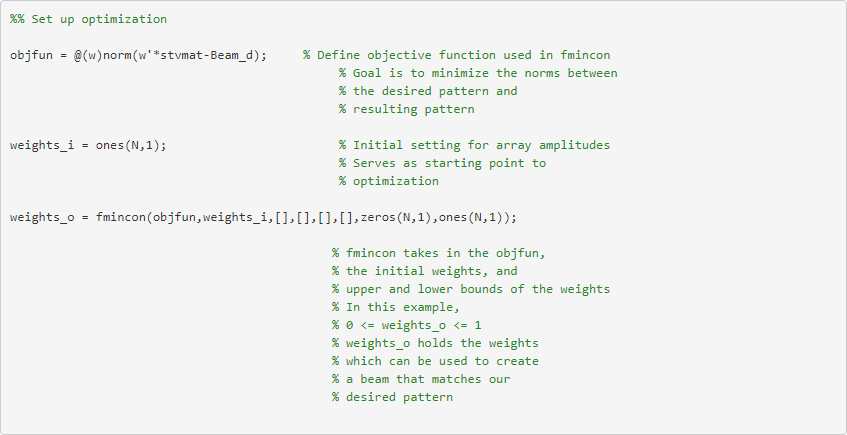
因為我們正在嘗試確定可以縮小兩個波束方向圖之間距離的陣元權重,所以我們將使用 Optimization Toolbox 的 fmincon 函數,該函數包含目標函數、權重的初始值和約束。初始加權值設置為 1。約束是分數加權值的最小值和最大值,我們將其定義為介于 0 和 1 之間。
當我們調用 fmincon 時,我們提供了目標函數的句柄,它可以區分一開始使用的方向圖與迭代細化權重時生成的方向圖。優化結束時,我們可以得到一組權重,將其應用于數組陣元時會與期望方向圖匹配。圖 3 中的曲線顯示了方位角上期望方向圖和合成方向圖的幅度。
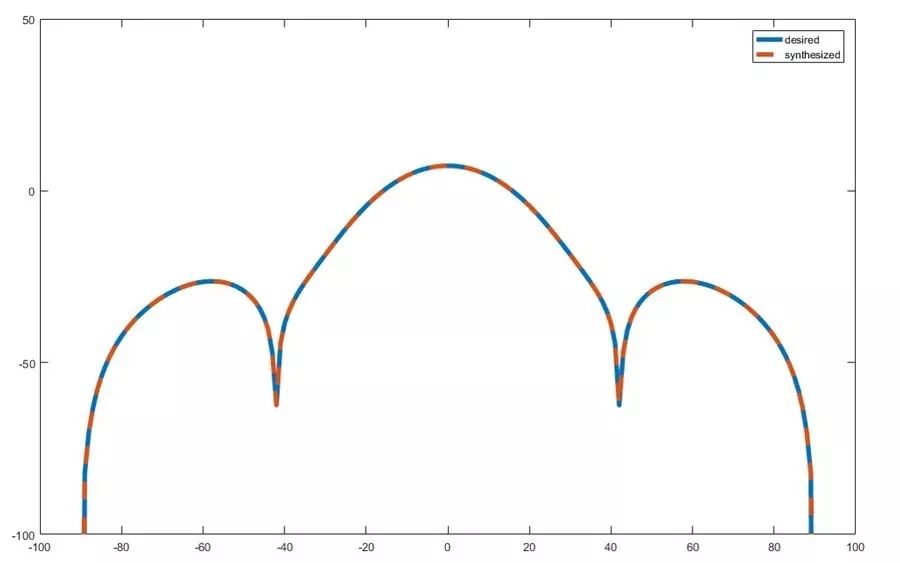
圖3:優化后期望方向圖和合成方向圖的比較。
示例2:優化權重和陣元位置
在此示例中,我們將完成以下步驟(圖 4):
識別方向圖屬性
定義約束,確保系統可以實現
開發一個客觀(成本)函數,得到所需“方向”的方向圖屬性
運行優化
將優化的方向圖與期望方向圖進行比較
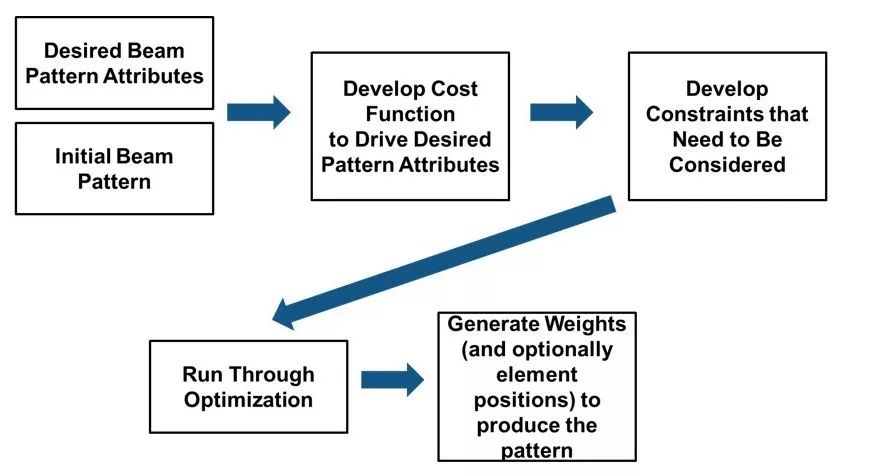
圖4:示例 2 的工作流程步驟。
請注意,與示例 1 只控制陣元的幅度權重不同,這種設計更復雜,具有更多的陣列陣元。我們現在要控制每個陣元的幅度、相位和 2D 位置。我們的優化目標是降低方向圖的最大旁瓣電平。
由于此示例具有許多局部最優解且目標非光滑,因此我們將使用 Global Optimization Toolbox 的 patternsearch 求解器。當目標光滑時,globalsearch 可能是更好的選擇。
與前面的示例一樣,我們需要確保優化過程計算出的陣元位置間隔不會過于緊密。我們將為幅度和相位設置相同的最小和最大范圍。
在此示例中,我們的自由度為 100:除了 25 個幅度值和 25 個相位值(每個陣元一個)之外,還有 50 個 y-z 位置來描述 25 個陣元位置。每個參數的下限(lb)和上限(ub)值包含在 100 個陣元的 MATLAB 向量中,其中向量元素 1 至 25 表示(yz 陣列的)初始 y 位置,而向量元素 26 至 50 表示初始 z 位置。
圖 5 左側的陣列顯示了間隔均勻的陣元的初始位置。對于 y-z 平面陣元位置的下限和上限,我們使用(±0.24 * λ)均勻矩形陣列起點的間距建立網格(圖5,右)。
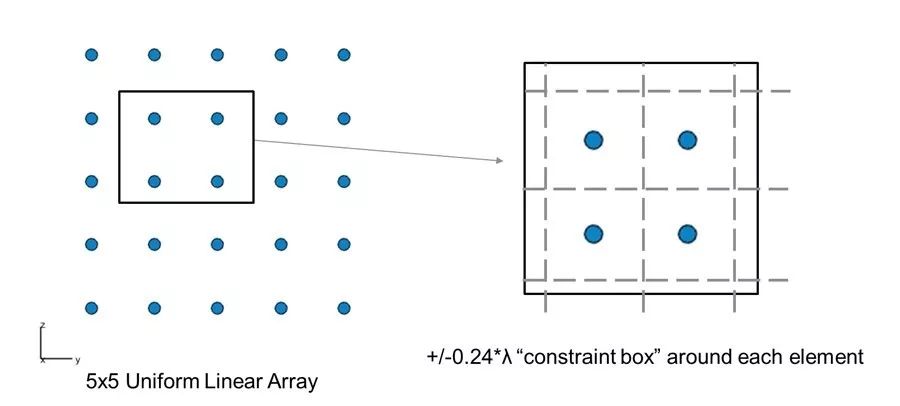
圖5:左圖:均勻線性陣列(5x5個陣元)。右圖:每個陣元周圍對應的“約束框”。
向量元素 51 至 75 表示初始幅度值,向量元素 76 至 100 表示初始相位值。該向量的每個部分包括 25 個參數,對應 5x5 陣列大小。
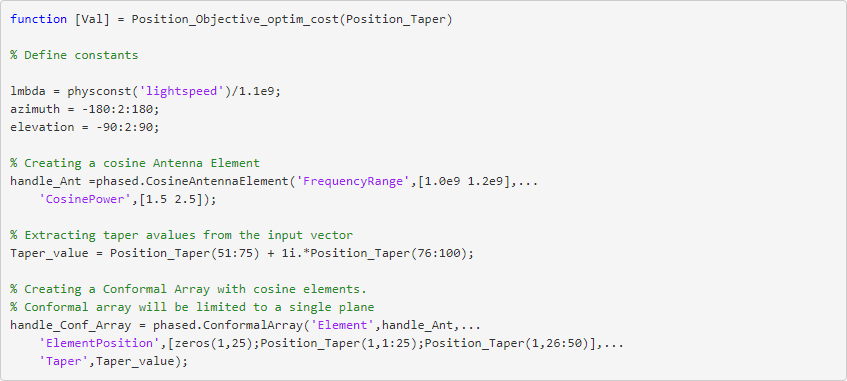
我們首先使用 Phased Array System Toolbox 建立一個 5x5 陣列,從均勻間隔的陣元開始。然后,我們使用 ConformalArray 構造來更改每個陣元的位置。我們可以隨著整個優化過程中位置的變化更新我們的模型。
請注意,我們在此陣列模型中使用了理想的余弦天線陣元。我們也可以使用 Antenna Toolbox 中的方向圖或外部測量的方向圖。
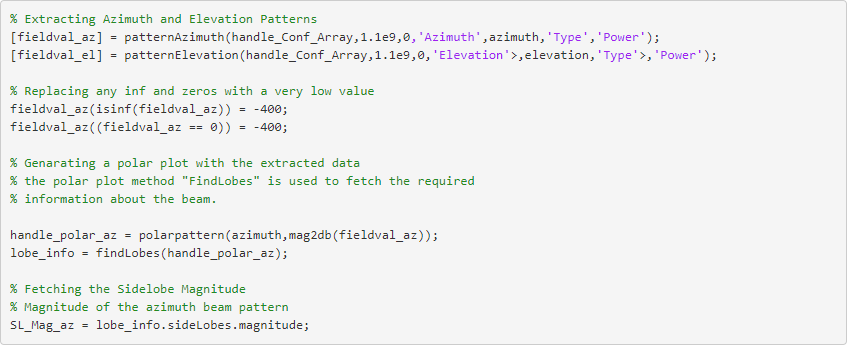
建立了陣列后,我們就可以確定方位角和仰角的波束方向圖。然后,我們可以使用此數據來提取與方向圖相關的關鍵指標。我們將重點關注旁瓣,但也可以考慮許多其他參數,例如主瓣增益或 3dB 波瓣寬度。
建立目標函數
設置優化參數,實現 5x5 平面陣列的方位角和仰角的性能。構建方向圖,減少旁瓣電平的幅度。其他類似的例子可能包括增加主瓣的幅度或減小 3dB 帶寬。
在隨后的代碼中,我們使用方位角和仰角旁瓣的總和。我們還增加了一個方位角和仰角旁瓣電平之間的絕對差值,以確保它們達到峰值時是接近的。因為優化引擎可以最小化目標函數,所以每次迭代此函數時,Val 都為最小值。您可根據特定要求調整這些參數。
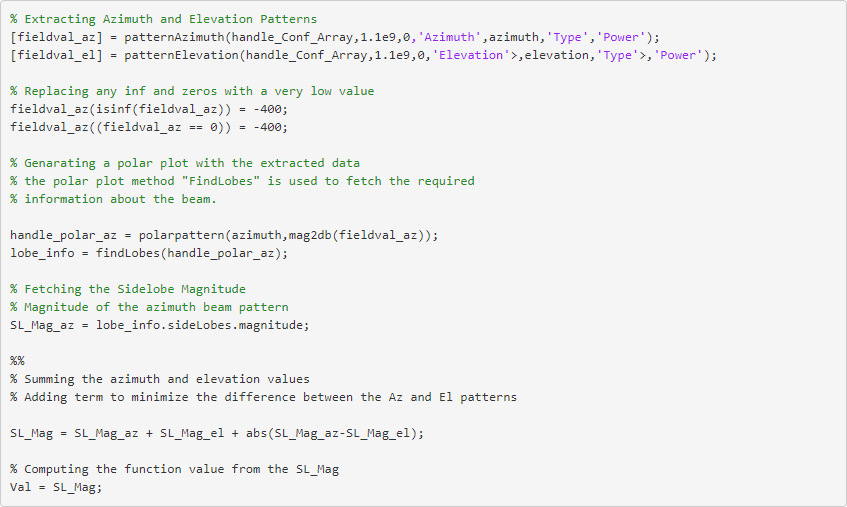
圖 6 顯示了所得到的方位面中的極坐標圖。
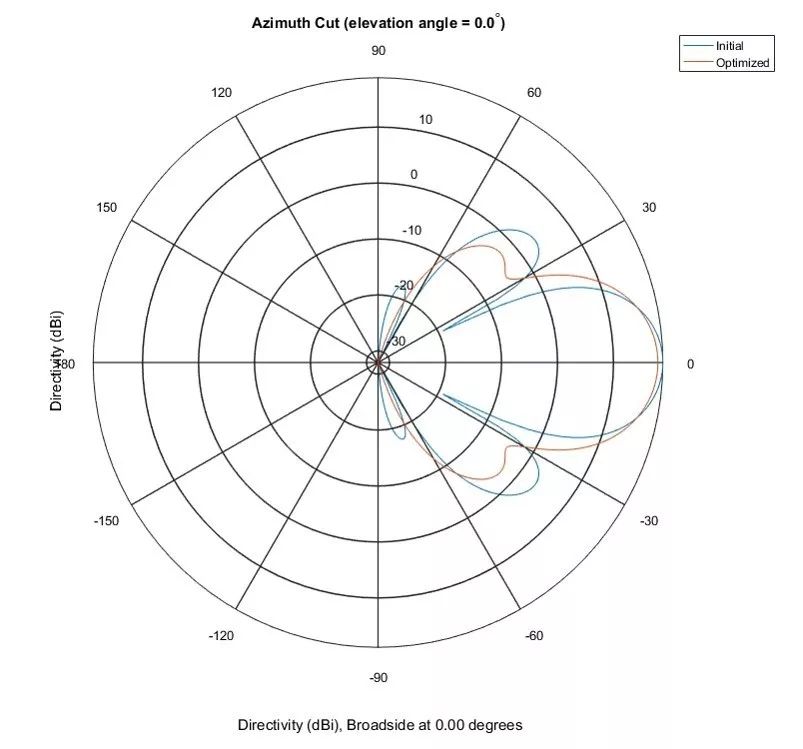
圖6:方位面中的極坐標圖案顯示起點圖案(藍色線)和優化后的圖案(橙色線)。
圖 7 顯示了仰角面的相應視圖。
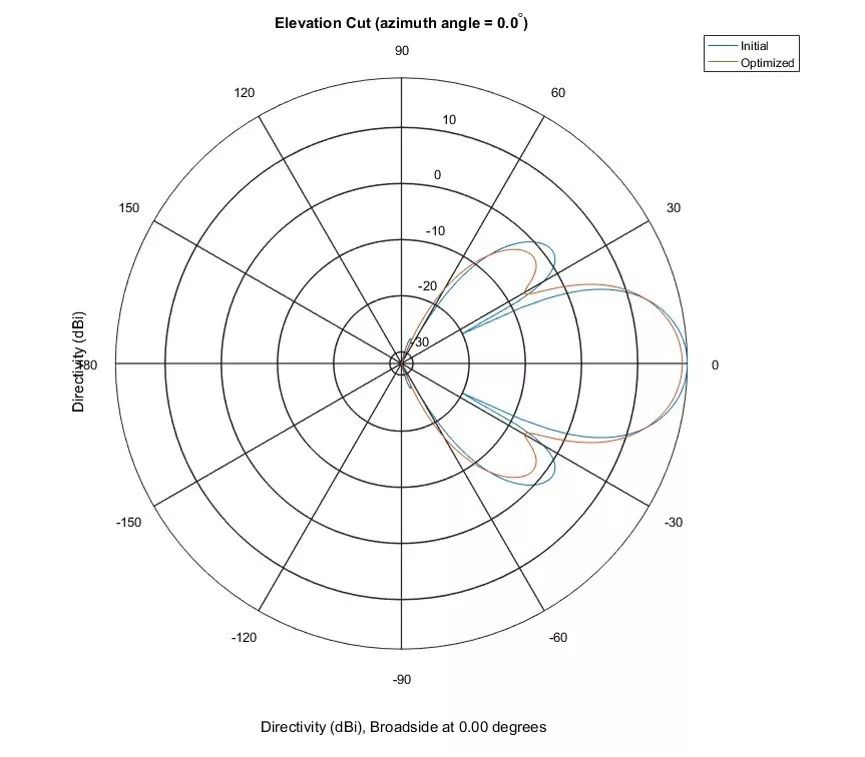
圖7:仰角面中的極坐標圖案顯示起點圖案(藍色線)和優化后的圖案(橙色線)。
使用通過優化函數的多次迭代返回的權重和陣元位置生成新的方向圖。圖 8 顯示了得到的陣元位置和波束方向圖。
圖8:優化后得到的陣列和波束方向圖。
擴展示例
在這些示例中,所有分析都在單個頻率值下完成。實際上,系統必須在一系列頻率上工作。
可以將同樣的優化技術應用于各種頻率的操作。例如,針對寬帶應用,我們可以研究整個頻帶內等間隔的多個頻率。然后決定應用的哪個方面最重要。例如,最好針對特定組合進行優化,并基于該組合選擇定位。所有其他場景只需使用加權即可提供“盡力而為”的服務。
如果認為所有頻率組合都擁有特定性能要求更重要,則可以相應地調整優化過程。還可以擴展優化過程,在一組導向矢量上構建最佳子陣列架構。
除了擴展優化以覆蓋更寬的頻率范圍外,還可以將相移量化效果添加到 Phased Array System Toolbox 模型中,確保終端系統的行為與仿真結果的相同。這對優化結果的構建來說非常重要。
可以通過優化技術實現期望的波束性能,并以類似的方法設計構建在多個平面上的共形陣列。
-
函數
+關注
關注
3文章
4417瀏覽量
67534 -
代碼
+關注
關注
30文章
4968瀏覽量
73999
發布評論請先 登錄
AMS借助Altium Designer簡化電子設計工作流程
是德科技與三星攜手英偉達展示端到端AI-RAN驗證工作流程
安寶特方案丨AI 識別遇上 AR 工作流,PCB 質控迎來新的「黃金時代」

一張圖看懂遠動通信裝置的工作流程

芯片ATE測試詳解:揭秘芯片測試機臺的工作流程

強強合作 西門子與日月光合作開發 VIPack 先進封裝平臺工作流程

ADI Power Studio工作流程與工具概述
恩智浦i.MX RT1180跨界MCU驅動EtherCAT的工作流程
VirtualLab Fusion:平面透鏡|從光滑表面到菲涅爾、衍射和超透鏡的演變
非技術人員如何用n8n + DeepSeek打造AI自動化工作流?



 工商網監
工商網監
評論