在實(shí)時(shí)控制系列的前一部分內(nèi)容中,我們深入介紹了處理的功能塊,請(qǐng)點(diǎn)擊閱讀:實(shí)時(shí)處理如何驅(qū)動(dòng)高性能電源系統(tǒng)。在這一部分中,我們將討論實(shí)時(shí)控制的驅(qū)動(dòng)階段(更新系統(tǒng)),以及為什么此階段對(duì)于可靠的系統(tǒng)輸出運(yùn)行很重要。
2022-12-05 11:45:00 1093
1093 (發(fā)音為R-toss)利用了調(diào)度和排隊(duì)的設(shè)計(jì)模式,但它增加了更多功能,包括任務(wù)優(yōu)先級(jí),中斷處理,任務(wù)間通信,文件系統(tǒng),多線(xiàn)程和更多。所有這些都是實(shí)現(xiàn)和超越時(shí)間限制目標(biāo)的最有效方法。流行的實(shí)時(shí)操作系統(tǒng)
2020-09-04 14:01:13
和GaN等新技術(shù)相結(jié)合,可提高功率密度和效率,有助于充分降低應(yīng)用的功率損耗。現(xiàn)代電機(jī)驅(qū)動(dòng)系統(tǒng)的性能持續(xù)提高,因此對(duì)實(shí)時(shí)控制的要求也日益嚴(yán)格。例如,高精度高速計(jì)算機(jī)數(shù)控機(jī)械(控制磨床和車(chē)床等各種復(fù)雜機(jī)床
2022-11-03 06:03:07
對(duì)很多嵌入式系統(tǒng)來(lái)說(shuō),一個(gè)設(shè)計(jì)良好的實(shí)時(shí)操作系統(tǒng)可以讓開(kāi)發(fā)工程師把握系統(tǒng)執(zhí)行任何任務(wù)或響應(yīng)任何關(guān)鍵事件的時(shí)間,滿(mǎn)足系統(tǒng)實(shí)時(shí)性要求。為了理解RTOS如何通過(guò)系統(tǒng)調(diào)度策略實(shí)現(xiàn)實(shí)時(shí)性要求,本文介紹了搶占式調(diào)度、可搶占的內(nèi)核、優(yōu)先級(jí)繼續(xù)和中斷處理等概念。
2019-07-19 06:18:41
請(qǐng)問(wèn)眾位大神,如何在前面板實(shí)現(xiàn)實(shí)時(shí)顯示系統(tǒng)時(shí)間?
2012-05-28 19:31:19
映射到用戶(hù)層的取值范圍為-20~+19,數(shù)值越高優(yōu)先級(jí)越低,默認(rèn)初始值為0 ,子線(xiàn)程會(huì)繼承父線(xiàn)程的優(yōu)先級(jí)。對(duì)于實(shí)時(shí)線(xiàn)程,Linux系統(tǒng)會(huì)盡量使其調(diào)度延時(shí)在一個(gè)時(shí)間期限內(nèi),但是不能保證總是如此,不過(guò)正常情況下已經(jīng)可以滿(mǎn)足比較嚴(yán)格的時(shí)間要求了。下面將分別介紹這些調(diào)度類(lèi)。
2019-07-05 07:05:08
映射到用戶(hù)層的取值范圍為-20~+19,數(shù)值越高優(yōu)先級(jí)越低,默認(rèn)初始值為0 ,子線(xiàn)程會(huì)繼承父線(xiàn)程的優(yōu)先級(jí)。對(duì)于實(shí)時(shí)線(xiàn)程,Linux系統(tǒng)會(huì)盡量使其調(diào)度延時(shí)在一個(gè)時(shí)間期限內(nèi),但是不能保證總是如此,不過(guò)正常
2017-01-18 14:12:37
在 RT-Thread 實(shí)時(shí)操作系統(tǒng)中,各種各樣的設(shè)備驅(qū)動(dòng)是通過(guò)一套 I/O 設(shè)備管理框架來(lái)管理的。設(shè)備管理框架給上層應(yīng)用提供了一套標(biāo)準(zhǔn)的設(shè)備操作 API,開(kāi)發(fā)者通過(guò)調(diào)用這些標(biāo)準(zhǔn)設(shè)備操作 API
2022-07-19 11:37:45
實(shí)時(shí)控制系統(tǒng)工作的操作系統(tǒng)。首要任務(wù)是調(diào)度一切可利用的資源完成實(shí)時(shí)控制任務(wù),其次才著眼于提高計(jì)算機(jī)系統(tǒng)的使用效率,重要特點(diǎn)是要滿(mǎn)足對(duì)時(shí)間的限制和要求。目前在中國(guó)大多數(shù)嵌入式軟件開(kāi)發(fā)還是基于處理器直接
2017-09-05 14:39:07
big.LITTLE和GPU相結(jié)合實(shí)現(xiàn)性能和功耗的最佳匹配
2021-02-02 07:00:45
raw os 正式支持基于狀態(tài)機(jī)的實(shí)時(shí)事件驅(qū)動(dòng)編程raw os 事件驅(qū)動(dòng)框架特性:1事件處理模型符合UML規(guī)范2 融入了fsm和hsm狀態(tài)機(jī)的編程模型。3 事件的通訊采用異步通訊4支持事件一對(duì)一
2013-02-27 14:23:07
在實(shí)時(shí)操作系統(tǒng)中,線(xiàn)程調(diào)度花費(fèi)的時(shí)間是一個(gè)值得關(guān)注的影響系統(tǒng)實(shí)時(shí)性的因素,尤其是在系統(tǒng)需要處理緊急的任務(wù)時(shí),線(xiàn)程調(diào)度的時(shí)間更是不能忽略。本文給出了一種在GD32單片機(jī)上測(cè)量RT-Thread系統(tǒng)線(xiàn)程調(diào)度時(shí)間的方法。
2022-01-20 07:18:38
在 RT-Thread 實(shí)時(shí)操作系統(tǒng)中,各種各樣的設(shè)備驅(qū)動(dòng)是通過(guò)一套 I/O 設(shè)備管理框架來(lái)管理的。設(shè)備管理框架給上層應(yīng)用提供了一套標(biāo)準(zhǔn)的設(shè)備操作 API,開(kāi)發(fā)者通過(guò)調(diào)用這些標(biāo)準(zhǔn)設(shè)備操作 API
2022-07-15 11:02:16
針對(duì)半導(dǎo)體生產(chǎn)線(xiàn)調(diào)度復(fù)雜、難以?xún)?yōu)化的問(wèn)題,本文提出一種基于層次有色賦時(shí)Petri網(wǎng)技術(shù)和遺傳算法相結(jié)合的優(yōu)化調(diào)度方法.該方法利用層次化的思想結(jié)合自頂向下建模方法對(duì)半導(dǎo)體生產(chǎn)線(xiàn)進(jìn)行模塊化建模,模型不僅
2010-05-04 08:08:48
開(kāi)始。其中物聯(lián)網(wǎng)軟硬件是很關(guān)鍵的一環(huán),如何將軟件和硬件相結(jié)合,嵌入式軟件系統(tǒng)和硬件系統(tǒng)就需要先了解一下。一、嵌入式硬件系統(tǒng)大多數(shù)嵌入式系統(tǒng)的硬件平臺(tái)。它包括兩部分:1、以通用處理器為中心的協(xié)議處理...
2021-12-22 06:54:10
1、縮短中斷響應(yīng)時(shí)間。幾乎所有的實(shí)時(shí)事件都是通過(guò)中斷上報(bào)的,當(dāng)中斷來(lái)臨時(shí),我們必須停止當(dāng)前的一切任務(wù),響應(yīng)中斷,我們把中斷分成兩部分:上半部分與下半部分,或者快中斷部分與慢中斷部分。上半部
2020-07-08 15:41:55
時(shí)間片調(diào)度法的原理是什么?基于μC/OSII時(shí)間片調(diào)度過(guò)程是怎么進(jìn)行的?如何設(shè)計(jì)一種優(yōu)先級(jí)和時(shí)間片相結(jié)合的調(diào)度法?
2021-04-27 06:41:33
最近想做個(gè)小車(chē),遇到個(gè)問(wèn)題,就是想將履帶和輪子相結(jié)合,但是怎么樣設(shè)計(jì)呢?求各位幫忙一下!
2013-01-10 00:07:32
多個(gè)模塊的執(zhí)行時(shí)間 實(shí)時(shí)操作系統(tǒng)的選擇? 內(nèi)核占用存儲(chǔ)區(qū)尺寸? RTOS 性能:任務(wù)切換時(shí)間、調(diào)度任務(wù)數(shù)和優(yōu)先級(jí)數(shù)? 軟件組件和設(shè)備驅(qū)動(dòng)程序的完備程度? 開(kāi)發(fā)調(diào)試工具易用性? 標(biāo)準(zhǔn)兼容性,是否支持POSIX標(biāo)準(zhǔn)? RTOS發(fā)送形式,源代碼或二進(jìn)制代碼? 許可證發(fā)送形式,開(kāi)發(fā)許可和生產(chǎn)許可
2011-12-10 14:35:57
的時(shí)間限制內(nèi)完成,而軟實(shí)時(shí)任務(wù)對(duì)時(shí)間限制更靈活。
任務(wù)調(diào)度和優(yōu)先級(jí):實(shí)時(shí)嵌入式操作系統(tǒng)通過(guò)任務(wù)調(diào)度器來(lái)管理和分配任務(wù),通常采用優(yōu)先級(jí)調(diào)度算法,確保高優(yōu)先級(jí)的實(shí)時(shí)任務(wù)得到及時(shí)處理。
中斷處理:實(shí)時(shí)嵌入式
2025-11-13 06:30:43
`§ 調(diào)度:給定一組實(shí)時(shí)任務(wù)和系統(tǒng)資源,確定每個(gè)任務(wù)何時(shí)何地執(zhí)行的整個(gè)過(guò)程。§ § 搶占式調(diào)度:通常是優(yōu)先級(jí)驅(qū)動(dòng)的調(diào)度,如uCOS。優(yōu)點(diǎn)是實(shí)時(shí)性好、反應(yīng)快,調(diào)度算法相對(duì)簡(jiǎn)單,可以保證高優(yōu)先級(jí)
2020-03-28 13:21:41
摘要: 嵌入式Linux和Java技術(shù)非常適于協(xié)同工作,他們的結(jié)合預(yù)示著下一代嵌入式系統(tǒng)已經(jīng)開(kāi)始出現(xiàn)。同時(shí)這種組合使開(kāi)發(fā)技術(shù)進(jìn)入一個(gè)新的層次,也提供了一個(gè)新的配置的選擇。在嵌入式Linux操作系統(tǒng)和Java技術(shù)相結(jié)合的開(kāi)發(fā)環(huán)境...
2021-11-04 08:52:21
的改造。主要的方法有:對(duì)內(nèi)核的改造,如雙內(nèi)核途徑和搶占內(nèi)核途徑,細(xì)化內(nèi)核的時(shí)鐘粒度。另一種改造的主要途徑是內(nèi)核的調(diào)度策略。進(jìn)程調(diào)度算法優(yōu)劣決定系統(tǒng)的實(shí)時(shí)性。本文就是通過(guò)改善Linux的調(diào)度算法來(lái)提升Lin...
2021-11-05 08:15:04
等待的事件發(fā)生。
4、RTOS任務(wù)切換
RTOS(Real Time Operating System),實(shí)時(shí)操作系統(tǒng),指當(dāng)外界事件或數(shù)據(jù)產(chǎn)生時(shí),能夠接受并以足夠快的速度予以處理,調(diào)度一切可利用的資源
2025-12-16 08:15:44
系統(tǒng)中,有事期望能在一個(gè)可調(diào)度整體內(nèi)處理這些中斷句柄,從而能更有效地區(qū)分不同實(shí)時(shí)任務(wù)的密度,分配不同的優(yōu)先級(jí)。因此,單純采用bottom half hadling縮短時(shí)間片方法在對(duì)實(shí)時(shí)性恩能夠嚴(yán)格要求
2014-01-06 13:31:31
的響應(yīng)時(shí)間是調(diào)度的主要目標(biāo);而在強(qiáng)實(shí)時(shí)操作系統(tǒng)中,總是優(yōu)先級(jí)高 的任務(wù)優(yōu)先獲得處理機(jī)的使用權(quán)。 Linux 具有內(nèi)核穩(wěn)定、功能強(qiáng)大、可裁減、低成本等特點(diǎn),非常適合嵌入式應(yīng)用。但是 Linux 內(nèi)核
2019-12-10 14:17:58
怎樣去設(shè)計(jì)FFD和RFD相結(jié)合的鏈狀拓?fù)浣Y(jié)構(gòu)?如何去實(shí)現(xiàn)公交車(chē)報(bào)站功能?如何去實(shí)現(xiàn)公交車(chē)輛定位?
2021-05-20 06:13:38
智能小車(chē)如何與機(jī)械臂相結(jié)合?
2021-12-27 06:15:24
做的一個(gè)簡(jiǎn)單的狀態(tài)機(jī)與枚舉相結(jié)合的程序,挺簡(jiǎn)單的。
2018-08-15 08:06:07
將模擬鑒相器輸出與頻率牽引輸出相結(jié)合的方法
2019-09-26 09:00:59
當(dāng)看門(mén)狗計(jì)時(shí)器(WDT)計(jì)數(shù)器溢出并觸發(fā)超時(shí)事件時(shí),用戶(hù)可以在看門(mén)狗計(jì)時(shí)器(WDT)生成系統(tǒng)重置信號(hào)之前清除超時(shí)事件標(biāo)志多長(zhǎng)時(shí)間?
2020-11-23 15:35:15
RTOS 原理前后臺(tái)系統(tǒng)的優(yōu)點(diǎn)以及缺點(diǎn)。為什么需要RTOS?什么是實(shí)時(shí)性?評(píng)價(jià)一個(gè)實(shí)時(shí)系統(tǒng)的主要參數(shù)是什么?臨界區(qū)問(wèn)題的產(chǎn)生,以及解決方法。優(yōu)先級(jí)反轉(zhuǎn)問(wèn)題的出現(xiàn),以及對(duì)實(shí)時(shí)系統(tǒng)的影響。解決優(yōu)先級(jí)反轉(zhuǎn)
2013-01-28 15:19:08
VxWorks實(shí)時(shí)內(nèi)核調(diào)度的研究分析論述了0S中調(diào)度的概念、類(lèi)型、調(diào)度隊(duì)列模型,并著重對(duì)VxWorks實(shí)時(shí)內(nèi)核進(jìn)行了分析。①關(guān)鍵詞:嵌入式實(shí)時(shí)操作系統(tǒng)(RTOS);VxWorks;調(diào)度
VxWor
2008-12-16 14:07:49 13
13 與實(shí)時(shí)任務(wù)的可調(diào)度分析不同,實(shí)時(shí)DVS調(diào)度在保證任務(wù)截止時(shí)間限制同時(shí),還要關(guān)注任務(wù)執(zhí)行的處理器功耗。功耗研究一段時(shí)間的累積效果,傳統(tǒng)基于最壞執(zhí)行時(shí)間的任務(wù)調(diào)度模
2008-12-16 23:55:1112 論述了OS 中調(diào)度的概念、類(lèi)型、調(diào)度隊(duì)列模型,并著重對(duì)VxWorks 實(shí)時(shí)內(nèi)核進(jìn)行了分析。關(guān)鍵詞:嵌入式實(shí)時(shí)操作系統(tǒng)(RTOS) ;VxWorks ;調(diào)度
Abstract :The concept and type of OS scheduling and
2009-03-25 10:36:1533 實(shí)時(shí)系統(tǒng)VxWorks下設(shè)備驅(qū)動(dòng)程序的編寫(xiě)詳解
2009-03-29 12:26:0015 基于VxWorks的顯卡實(shí)時(shí)驅(qū)動(dòng)程序的設(shè)計(jì)
2009-03-29 12:29:2912 為了滿(mǎn)足不同測(cè)控系統(tǒng)中傳感器輸出時(shí)間序列的實(shí)時(shí)濾波要求,針對(duì)小波變換不能遞推進(jìn)行的弱點(diǎn),通過(guò)分析小波實(shí)時(shí)濾波算法,研究了基于Mallat 快速離散小波變換的3 種實(shí)時(shí)濾波方法:
2009-04-07 09:48:1828 驅(qū)動(dòng)程序及串口驅(qū)動(dòng)的開(kāi)發(fā)和設(shè)計(jì)是構(gòu)建嵌入式系統(tǒng)的重要組成部分。該文介紹了Windows CE下的驅(qū)動(dòng)程序的結(jié)構(gòu)、開(kāi)發(fā)過(guò)程及Windows CE的中斷處理過(guò)程,提出流接口和分層相結(jié)合的驅(qū)動(dòng)
2009-04-13 09:04:5022 在RT-Linux 的基礎(chǔ)上提出一個(gè)能統(tǒng)一支持硬實(shí)時(shí)﹑軟實(shí)時(shí)和盡力而為應(yīng)用的調(diào)度框架,在該框架之下,硬實(shí)時(shí)應(yīng)用的響應(yīng)時(shí)間短且可預(yù)測(cè)。對(duì)軟實(shí)時(shí)應(yīng)用進(jìn)行接入控制,從而可以保
2009-06-11 09:48:0915 近年來(lái),實(shí)時(shí)系統(tǒng)得到了越來(lái)越廣泛的應(yīng)用,VxWorks 是較受歡迎的一種。在嵌入式實(shí)時(shí)系統(tǒng)中進(jìn)行軟硬件開(kāi)發(fā)的關(guān)鍵是編寫(xiě)高效可靠的設(shè)備驅(qū)動(dòng)程序。本文結(jié)合實(shí)際開(kāi)發(fā)經(jīng)驗(yàn)介紹
2009-06-12 11:38:249 結(jié)合我國(guó)大型礦山企業(yè)的特點(diǎn),介紹了礦山安全生產(chǎn)實(shí)時(shí)監(jiān)控及調(diào)度管理系統(tǒng)的組成、特點(diǎn)、功能、設(shè)備和應(yīng)用前景,該系統(tǒng)采用多媒體技術(shù)、計(jì)算機(jī)網(wǎng)絡(luò)技術(shù)、通訊與傳感器技術(shù)
2009-07-04 09:15:0024 實(shí)時(shí)應(yīng)用系統(tǒng)可能由功能不相交的任務(wù)子集組成,需要操作系統(tǒng)提供分層調(diào)度機(jī)制。
針對(duì)這一問(wèn)題,提出在μC/OS- Ⅱ實(shí)時(shí)內(nèi)核中加入固定時(shí)間分配方案來(lái)實(shí)現(xiàn)兩層的調(diào)度策
2009-07-07 13:13:1811 本文首先介紹RVM驗(yàn)證方法學(xué)和覆蓋率驅(qū)動(dòng)技術(shù),然后詳細(xì)分析如何使用結(jié)合覆蓋率驅(qū)動(dòng)技術(shù)的RVM驗(yàn)證方法學(xué)對(duì)SOC(System On Chip)進(jìn)行完備的功能驗(yàn)證, 最
2009-09-05 08:53:0015 實(shí)時(shí)操作系統(tǒng)的調(diào)度策略是影響系統(tǒng)實(shí)時(shí)性和穩(wěn)定性的一個(gè)重要因素,通過(guò)對(duì)搶占調(diào)度和分時(shí)調(diào)度的研究,設(shè)計(jì)了一個(gè)可分級(jí)搶占和分時(shí)調(diào)度的實(shí)時(shí)
2009-09-05 09:53:2115 實(shí)時(shí)操作系統(tǒng)要求具有速度快和可預(yù)測(cè)性的特點(diǎn),必須保證實(shí)時(shí)任務(wù)在要求的時(shí)間內(nèi)完成。本文在描述了優(yōu)先級(jí)位圖調(diào)度算法的機(jī)制后,然后針對(duì)其在支持任務(wù)數(shù)量,所需數(shù)據(jù)空間
2009-09-17 10:02:1310 該文提出了一種面向應(yīng)用優(yōu)化的片上總線(xiàn)調(diào)度策略。以系統(tǒng)通信事件信息為基礎(chǔ),使用最小任務(wù)松弛時(shí)間與最小總線(xiàn)空閑時(shí)間相結(jié)合的調(diào)度策略,在優(yōu)先保證滿(mǎn)足任務(wù)實(shí)時(shí)要求的基
2009-11-18 13:51:235 本文概要介紹TVxWorks系統(tǒng)結(jié)構(gòu)及啟動(dòng)過(guò)程,重點(diǎn)介紹了VxWorks圖形驅(qū)動(dòng)軟件的開(kāi)發(fā)方法。該設(shè)計(jì)具備實(shí)時(shí)性并兼容通用圖形庫(kù)。
2009-12-05 16:59:5116 本文簡(jiǎn)要介紹了多任務(wù)內(nèi)核,重點(diǎn)分析了嵌入式實(shí)時(shí)操作系統(tǒng)VxWorks的內(nèi)核調(diào)度機(jī)制——優(yōu)先級(jí)搶占調(diào)度和時(shí)間片輪轉(zhuǎn)調(diào)度算法。
2009-12-11 16:15:0014 為了提高工業(yè)儀表的開(kāi)發(fā)效率,降低人機(jī)界面的設(shè)計(jì)難度,設(shè)計(jì)了一種具有通用接口的彩色液晶驅(qū)動(dòng)終端。利用高性能ARM9微控制器與嵌入式Linux操作系統(tǒng)相結(jié)合的方法通過(guò)S1D13506液晶
2010-12-24 16:17:0055 實(shí)時(shí)雨量監(jiān)測(cè)系統(tǒng)WX-LDSW02是一種能夠實(shí)時(shí)監(jiān)測(cè)和記錄降雨量、降雨強(qiáng)度等數(shù)據(jù)的系統(tǒng)。它結(jié)合了先進(jìn)的傳感器技術(shù)、數(shù)據(jù)處理技術(shù)和網(wǎng)絡(luò)通信技術(shù),能夠迅速、準(zhǔn)確地傳遞降雨信息,為城市防洪、排水、交通等
2024-07-19 15:13:27
基于μC/OS-II的時(shí)間片調(diào)度法設(shè)計(jì)方法
多任務(wù)的調(diào)度算法多種多樣,各種調(diào)度算法也各有千秋。在某些應(yīng)用場(chǎng)合,時(shí)間片調(diào)度法就比純
2009-03-29 15:08:081515 
雨水情在線(xiàn)監(jiān)測(cè)系統(tǒng)WX-SW3通過(guò)實(shí)時(shí)采集水位、流量、雨量數(shù)據(jù),結(jié)合智能調(diào)度算法,實(shí)現(xiàn)防洪、灌溉、供水等多目標(biāo)需求的動(dòng)態(tài)平衡,推動(dòng)水資源配置從“經(jīng)驗(yàn)決策”向“數(shù)據(jù)驅(qū)動(dòng)”轉(zhuǎn)型。其核心價(jià)值在于將水文數(shù)據(jù)
2025-12-12 14:28:26
將模擬鑒相器輸出與頻率牽引輸出相結(jié)合的方法
2009-09-05 10:46:181123 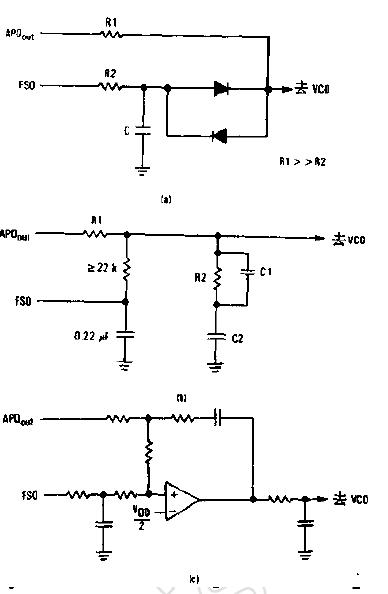
前言
本文在現(xiàn)有電動(dòng)汽車(chē)動(dòng)力控制方法基礎(chǔ)上,設(shè)計(jì)并實(shí)現(xiàn)了一種電助力轉(zhuǎn)向與雙后輪獨(dú)立驅(qū)動(dòng)相結(jié)
2010-11-10 18:11:211476 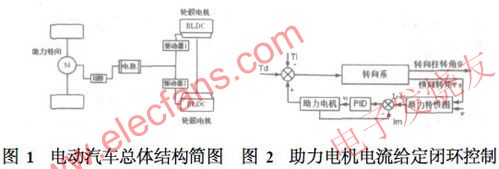
隨著實(shí)時(shí)操作系統(tǒng)在工業(yè)領(lǐng)域的深入應(yīng)用,硬件設(shè)備的實(shí)時(shí)驅(qū)動(dòng)程序已逐漸成為了開(kāi)發(fā)人員關(guān)注的焦點(diǎn)。掌握實(shí)時(shí)驅(qū)動(dòng)的設(shè)計(jì)方法,能夠從一定程度上解決由于設(shè)備實(shí)時(shí)驅(qū)動(dòng)問(wèn)題給實(shí)時(shí)
2011-05-03 17:11:1825 本論文綜合考慮了各任務(wù)響應(yīng)的實(shí)時(shí)性需求,對(duì)任務(wù)進(jìn)行了創(chuàng)造性的調(diào)整,進(jìn)而將軟實(shí)時(shí)系統(tǒng)和硬實(shí)時(shí)系統(tǒng)進(jìn)行了有機(jī)的結(jié)合,規(guī)劃出最為合理的任務(wù)調(diào)度模式。
2011-08-24 11:24:201216 
在射頻產(chǎn)品設(shè)計(jì)中將仿真與測(cè)量相結(jié)合,縮短產(chǎn)品開(kāi)發(fā)周期一直以來(lái)都是研發(fā)機(jī)構(gòu)的主要目標(biāo)。減少開(kāi)發(fā)時(shí)間的方法之一是將設(shè)計(jì)和測(cè)試工作同步進(jìn)行——即通常遵循V型圖產(chǎn)品開(kāi)發(fā)模式
2012-09-10 16:53:42571 
動(dòng)靜態(tài)相結(jié)合LED顯示【C語(yǔ)言版】動(dòng)靜態(tài)相結(jié)合LED顯示【C語(yǔ)言版】動(dòng)靜態(tài)相結(jié)合LED顯示【C語(yǔ)言版】動(dòng)靜態(tài)相結(jié)合LED顯示【C語(yǔ)言版】
2015-12-29 15:51:460 一種卷積神經(jīng)網(wǎng)絡(luò)和極限學(xué)習(xí)機(jī)相結(jié)合的人臉識(shí)別方法_余丹
2017-01-08 11:20:200 基于CANoe總線(xiàn)系統(tǒng)實(shí)時(shí)調(diào)度的仿真
2017-01-24 17:21:0422 混成時(shí)空Petri網(wǎng)的CPS實(shí)時(shí)事件模型_譚朋柳
2017-03-19 19:07:040 1 引言 本文分析了Windows 系統(tǒng)的進(jìn)程調(diào)度機(jī)制,并設(shè)計(jì)了一種基于Windows 操作系統(tǒng)內(nèi)核驅(qū)動(dòng)的多核CPU 線(xiàn)程管理方法,實(shí)現(xiàn)了一個(gè)基于Windows 內(nèi)核驅(qū)動(dòng)的線(xiàn)程管理服務(wù)系統(tǒng),它能
2017-10-31 11:02:460 實(shí)時(shí)系統(tǒng)要求任務(wù)在最差情況下能在其截止時(shí)間前獲得結(jié)果,若超過(guò)了其截止時(shí)間,也會(huì)認(rèn)為是錯(cuò)誤的行為,所以改進(jìn)任務(wù)可調(diào)度性分析、提高任務(wù)集可調(diào)度性尤其重要。統(tǒng)一調(diào)度能結(jié)合固定優(yōu)先級(jí)調(diào)度的優(yōu)點(diǎn),防止不必要
2017-11-20 11:27:220 為適應(yīng)實(shí)際系統(tǒng)中任務(wù)集的不斷變化以及不可忽視狀態(tài)切換開(kāi)銷(xiāo)的要求,針對(duì)多核多處理器系統(tǒng)中常見(jiàn)的周期任務(wù)模型,提出一種基于動(dòng)態(tài)松弛時(shí)間回收的開(kāi)銷(xiāo)敏感節(jié)能實(shí)時(shí)調(diào)度算法DSROM,在每個(gè)TL面的初始時(shí)刻
2017-11-27 09:49:200 RTOS的好壞有多種標(biāo)準(zhǔn),實(shí)時(shí)性則為一個(gè)關(guān)鍵指標(biāo),并且隨著實(shí)時(shí)操作系統(tǒng)實(shí)際運(yùn)用的加深及拓廣,對(duì)RTOS提出了更加嚴(yán)格的要求。在系統(tǒng)限定時(shí)間內(nèi)響應(yīng)處理外部事件已經(jīng)成為了對(duì)RTOS的一個(gè)基本要求。 任務(wù)調(diào)度,是RTOS的核心所在,任務(wù)間的通信、外
2017-11-30 11:29:021525 
檢驗(yàn)系統(tǒng)建模的時(shí)間Petri網(wǎng)建模方法,并設(shè)計(jì)了嵌入Petri網(wǎng)模型中的調(diào)度仿真器協(xié)助分析、優(yōu)化即時(shí)檢驗(yàn)控制過(guò)程。仿真實(shí)驗(yàn)結(jié)果表明所提出的時(shí)間Petri網(wǎng)建模方法在可達(dá)節(jié)點(diǎn)和運(yùn)行時(shí)間等方面能夠滿(mǎn)足并行多類(lèi)別即時(shí)檢驗(yàn)調(diào)度與控制系統(tǒng)的流程建模實(shí)
2017-12-28 15:02:080 調(diào)度方法;并給出了副版本可重疊執(zhí)行的判定方法,以及任務(wù)最壞響應(yīng)時(shí)間的計(jì)算公式。通過(guò)實(shí)驗(yàn)和分析表明,和以前算法相比,將處理機(jī)分成兩組分別執(zhí)行任務(wù)主版本和任務(wù)副版本,減少了任務(wù)調(diào)度所需進(jìn)行可調(diào)度測(cè)試的時(shí)間,增
2018-01-14 11:26:040 端的策略,解決了異步多信道調(diào)度中存在的控制信道飽和問(wèn)題;其次,采用特殊信道(SC)結(jié)合優(yōu)先級(jí)指示的方法保證緊急數(shù)據(jù)快速切換信道進(jìn)行實(shí)時(shí)傳輸?shù)耐瑫r(shí),允許非緊急數(shù)據(jù)基于優(yōu)先級(jí)指示標(biāo)志采用退避機(jī)制占用信道,保證了特殊信道的利用率
2018-01-18 16:41:470 隨著多處理器實(shí)時(shí)系統(tǒng)在安全性攸關(guān)系統(tǒng)中的廣泛應(yīng)用,保證這類(lèi)系統(tǒng)的正確性成為一項(xiàng)重要的工作.可調(diào)度性是實(shí)時(shí)系統(tǒng)正確性的一項(xiàng)關(guān)鍵性質(zhì).它表示系統(tǒng)必須滿(mǎn)足的一些時(shí)間要求.傳統(tǒng)的可調(diào)度性分析方法結(jié)論保守或者
2018-02-06 16:46:370 在異構(gòu)多核處理器條件下,Min-Min算法調(diào)度性能較好但在系統(tǒng)實(shí)時(shí)響應(yīng)方面存在不足。最小空閑時(shí)間優(yōu)先調(diào)度算法( LSF)、最早截止時(shí)間優(yōu)先調(diào)度算法(EDF)和最大價(jià)值優(yōu)先調(diào)度算法(HVF)雖然在系統(tǒng)
2018-02-07 11:07:432 為滿(mǎn)足事件驅(qū)動(dòng)的無(wú)線(xiàn)信息物理融合系統(tǒng)較高的實(shí)時(shí)性要求,提出一種實(shí)時(shí)消息并行調(diào)度方法。將消息的截止期限作為影響無(wú)線(xiàn)網(wǎng)絡(luò)的主要因素,并考慮節(jié)點(diǎn)剩余能量和網(wǎng)絡(luò)平均延時(shí)。依據(jù)上述因素,基站為每個(gè)消息的發(fā)送
2018-03-29 14:03:350 的時(shí)間偏差,都有可能造成無(wú)法挽回的損失。這便是為何絕大多數(shù)嵌入式操作系統(tǒng)都采用實(shí)時(shí)操 作系統(tǒng)的主要原因。實(shí)時(shí)操作系統(tǒng)應(yīng)用到嵌入式領(lǐng)域,便出現(xiàn)了嵌入式實(shí)時(shí)操作系統(tǒng),它是實(shí)時(shí)操作系統(tǒng)與嵌入式系統(tǒng)相結(jié)合的產(chǎn)物
2019-04-02 14:43:07736 將異步電機(jī)調(diào)速的矢量控制方法與電壓空間矢量脈寬調(diào)制(SVPWM)技術(shù)相結(jié)合,構(gòu)建了以SVPWM信號(hào)驅(qū)動(dòng)功率器件的異步電機(jī)矢量控制調(diào)速系統(tǒng)結(jié)構(gòu)圖,并用Matlab軟件對(duì)該系統(tǒng)建模與仿真。仿真結(jié)果表明
2019-11-28 16:23:2612 系統(tǒng)。 同時(shí)柔性鉸鏈機(jī)構(gòu)還可以提供適當(dāng)?shù)念A(yù)緊,避免壓電陶瓷承受拉力,提高系統(tǒng)的使用壽命。以下是一些壓電陶瓷驅(qū)動(dòng)、柔性鉸鏈機(jī)構(gòu)傳動(dòng)相結(jié)合的典型例子。 高精密壓電納米定位臺(tái) 壓電納米定位臺(tái)采用壓電陶瓷驅(qū)動(dòng)、柔性鉸鏈
2020-04-21 16:10:541898 已成為視覺(jué)測(cè)量領(lǐng)域的一個(gè)發(fā)展趨勢(shì)。本文主要研究高速實(shí)時(shí)圖像處理系統(tǒng)中的圖像采集、處理技術(shù),采用FPGA和通用DSP相結(jié)合的方法,充分發(fā)揮FPGA加通用DSP結(jié)構(gòu)的靈活性及實(shí)時(shí)處理能力。
2020-07-28 17:03:041772 
閃電是中尺度,特別是中一Y尺度天氣系統(tǒng)研究的有力工具。閃電成像儀主要利用4種方法組合來(lái)實(shí)現(xiàn)閃電信號(hào)的增強(qiáng)與探測(cè)。這4種方法是:光譜濾波、空間濾波、時(shí)間濾波、幀一幀背景去除。實(shí)時(shí)事件處理器(RTEP
2021-01-22 15:08:3610 本文闡述了一個(gè)用于DSP的簡(jiǎn)潔而實(shí)用的實(shí)時(shí)多任務(wù)調(diào)度內(nèi)核的實(shí)現(xiàn)方法。DSP由于其架構(gòu)的特殊性,在任務(wù)調(diào)度方面與
2021-03-24 15:22:565772 ,仍是一個(gè)亟待解決的問(wèn)題。文中提出了一種問(wèn)題框架與模型驅(qū)動(dòng)技術(shù)相結(jié)合的方法,其可將問(wèn)題模型轉(zhuǎn)換為UML( Unified Modeling Language)需求模型中的用例圖和概念類(lèi)圖,進(jìn)而指導(dǎo)軟件系統(tǒng)的設(shè)計(jì)和實(shí)現(xiàn)。所開(kāi)發(fā)的CASE工具,通過(guò)支持領(lǐng)域涉眾和軟件設(shè)計(jì)人員合作建
2021-04-23 10:48:234 針對(duì)先驗(yàn)知識(shí)未知場(chǎng)景下的 Coflow調(diào)度問(wèn)題,提出一種近似最小有效瓶頸優(yōu)先的 Coflow調(diào)度方法。通過(guò)結(jié)合 Coflow當(dāng)前大小和寬度決定 oflow的調(diào)度順序,并區(qū)分出流大小以及短與長(zhǎng)等特征
2021-05-25 15:06:078 BuildingIQ 和 Scania 是捕獲和預(yù)處理工程數(shù)據(jù)并將其與傳統(tǒng)業(yè)務(wù)數(shù)據(jù)相結(jié)合以開(kāi)發(fā)分析驅(qū)動(dòng)系統(tǒng)的挑戰(zhàn)和成功方法的好例子。
2022-09-10 16:17:00684 分析驅(qū)動(dòng)的嵌入式系統(tǒng)就在這里。創(chuàng)建處理大量業(yè)務(wù)和工程數(shù)據(jù)的分析能力使許多行業(yè)的設(shè)計(jì)工程師能夠開(kāi)發(fā)更智能的產(chǎn)品和服務(wù)。他們可以使用分析來(lái)描述和預(yù)測(cè)系統(tǒng)的行為,并進(jìn)一步將分析與嵌入式控制系統(tǒng)相結(jié)合,以自動(dòng)化行動(dòng)和決策。
2022-09-10 16:52:001652 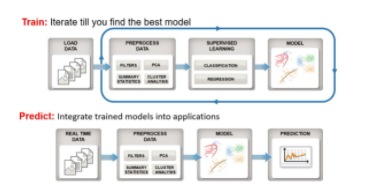
電子發(fā)燒友網(wǎng)站提供《數(shù)據(jù)驅(qū)動(dòng)的醫(yī)療調(diào)度和醫(yī)療保健市場(chǎng).zip》資料免費(fèi)下載
2022-11-28 10:08:180 本應(yīng)用筆記演示如何使用DS1678實(shí)時(shí)事件記錄器,將事件(INT輸入引腳上的電平轉(zhuǎn)換)記錄到1024字?jǐn)?shù)據(jù)記錄存儲(chǔ)器陣列中。第一個(gè)事件記錄為時(shí)間戳;后續(xù)事件記錄為上一個(gè)事件經(jīng)過(guò)的時(shí)間。時(shí)間戳和 1024 字?jǐn)?shù)據(jù)記錄存儲(chǔ)器可容納多達(dá) 1025 個(gè)記錄的事件。
2023-01-09 17:14:571510 
驅(qū)動(dòng)系統(tǒng)與無(wú)刷電機(jī)的特性有著密切的關(guān)系,人們已經(jīng)采用各種方法來(lái)改善電機(jī)的可控性和特性。在本文中,我們將解釋兩種典型的驅(qū)動(dòng)系統(tǒng):方波驅(qū)動(dòng)和正弦波驅(qū)動(dòng)。
2023-03-09 15:16:292692 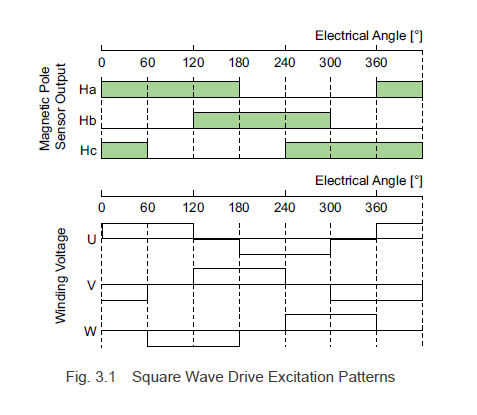
實(shí)時(shí)處理如何驅(qū)動(dòng)高性能電源系統(tǒng)? 實(shí)時(shí)處理是一種在實(shí)時(shí)環(huán)境中對(duì)來(lái)自外部傳感器和設(shè)備的數(shù)據(jù)進(jìn)行即時(shí)處理和響應(yīng)的技術(shù)。在電源系統(tǒng)中,實(shí)時(shí)處理可以通過(guò)多種方式來(lái)驅(qū)動(dòng)高性能,從而提高系統(tǒng)的效率、可靠性
2023-11-24 14:26:47954 整個(gè)算法分為預(yù)測(cè)和調(diào)度兩個(gè)部分,其中預(yù)測(cè)主要基于每種負(fù)載的歷史數(shù)據(jù),統(tǒng)計(jì)其時(shí)序變化情況,以供調(diào)度器使用;調(diào)度則基于上述信息,結(jié)合新任務(wù)的特征情況,給出合理的調(diào)度決策。
2023-11-29 11:06:311121 
相結(jié)合,進(jìn)一步提升企業(yè)的運(yùn)營(yíng)效率和產(chǎn)品質(zhì)量呢? 1、建立數(shù)據(jù)驅(qū)動(dòng)的思維模式 六西格瑪強(qiáng)調(diào)數(shù)據(jù)的重要性,而AI技術(shù)可以幫助企業(yè)更快速、更準(zhǔn)確地收集和分析數(shù)據(jù)。因此,將AI技術(shù)與六西格瑪相結(jié)合的首要步驟是建立數(shù)據(jù)驅(qū)動(dòng)的思維
2023-12-20 09:35:02881 我們非常高興地宣布,由鄭苗秀、沈鴻飛和廖建尚編著的《RT-Thread嵌入式實(shí)時(shí)操作系統(tǒng)內(nèi)核、驅(qū)動(dòng)和應(yīng)用開(kāi)發(fā)技術(shù)》一書(shū)正式發(fā)布。本書(shū)的編寫(xiě)團(tuán)隊(duì)由多位在嵌入式和實(shí)時(shí)操作系統(tǒng)領(lǐng)域有著豐富經(jīng)驗(yàn)的專(zhuān)家組
2024-09-03 08:06:061792 
Linux系統(tǒng)實(shí)現(xiàn)高級(jí)計(jì)算任務(wù),同時(shí)通過(guò)Betaflight實(shí)現(xiàn)無(wú)人機(jī)的飛控功能。 一、望獲實(shí)時(shí)Linux與Betaflight的角色分工 望獲實(shí)時(shí)Linux的優(yōu)勢(shì) 1.1實(shí)時(shí)性: 主要特點(diǎn)是其任務(wù)調(diào)度的確定性。這意味著系統(tǒng)能夠在指定的時(shí)間窗口內(nèi)響應(yīng)事件,而不會(huì)受到其他任務(wù)或系統(tǒng)負(fù)載
2025-01-10 16:17:331349 你們不知道的是驅(qū)動(dòng)板的響應(yīng)時(shí)間到底應(yīng)該如何測(cè)量?今天我們就來(lái)探討一下新的驅(qū)動(dòng)板知識(shí)。
2025-03-13 17:12:151175 易允恒 安科瑞電氣股份有限公司 摘要:本發(fā)明提供了一種電動(dòng)汽車(chē)充電設(shè)施有序充放電調(diào)度方法,該方法由電網(wǎng)調(diào)度系統(tǒng)和充電設(shè)施進(jìn)行協(xié)商共同確定電動(dòng)汽車(chē)進(jìn)行有序放電過(guò)程中的調(diào)峰功率,由電網(wǎng)調(diào)度系統(tǒng)根據(jù)各充電
2025-04-03 14:50:412730 
實(shí)時(shí)系統(tǒng)的開(kāi)發(fā)挑戰(zhàn)在于平衡響應(yīng)時(shí)間與系統(tǒng)開(kāi)銷(xiāo)。LuatOS核心庫(kù)通過(guò)時(shí)間片輪轉(zhuǎn)與優(yōu)先級(jí)混合調(diào)度策略,既保證了高實(shí)時(shí)性任務(wù)的即時(shí)執(zhí)行,又為低優(yōu)先級(jí)任務(wù)提供了公平調(diào)度機(jī)會(huì)。其事件驅(qū)動(dòng)架構(gòu)還支持異步處理
2025-05-16 13:56:33447 
RK3568驅(qū)動(dòng)指南|第十二篇 GPIO子系統(tǒng)-第135章 GPIO子系統(tǒng)與pinctrl子系統(tǒng)相結(jié)合實(shí)驗(yàn)
2025-05-23 13:47:02829 
大模型驅(qū)動(dòng)的發(fā)射任務(wù)智能調(diào)度分系統(tǒng)平臺(tái) ? ?作為航天智能化轉(zhuǎn)型的關(guān)鍵支撐,該平臺(tái)融合多源數(shù)據(jù)、動(dòng)態(tài)資源調(diào)度與大模型智能決策能力,顯著提升發(fā)射任務(wù)的效率、安全性與可靠性。以下從技術(shù)架構(gòu)、核心
2025-12-19 14:50:25166
 電子發(fā)燒友App
電子發(fā)燒友App











 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論