 電子發燒友App
電子發燒友App













 創作
創作 發文章
發文章 發帖
發帖  提問
提問  發資料
發資料 發視頻
發視頻資料介紹
一、編碼器介紹
編碼器是一種傳感器,主要是用來檢測機械運動的速度、位置、角度、距離或計數,它是一種集光、機、電為一體的數字化檢測裝置,它具有分辨率高、精度高、結構簡單、體積小、使用可靠、易于維護、性價比高等優點
近些年來,它發展為一種成熟的多規格、高性能的系列工業化產品,在數控機床、機器人、雷達、光電經緯儀、地面指揮儀、高精度閉環調速系統、伺服系統等諸多領域中得到了廣泛的引用
光電編碼器可以定義為:一種通過光電轉換,將輸至軸上的機械、幾何位移量轉換成脈沖或數字量的傳感器,它主要用于速度或位置(角度)的檢測。比較典型的光電編碼器由碼盤(Disk)、檢測光柵(Mask)、光電轉換電路(包括光源、光敏器件、信號轉換電路)、機械部件等組成
二、編碼器的分類
對于編碼器的分類,可以用下圖一的結構來表示:
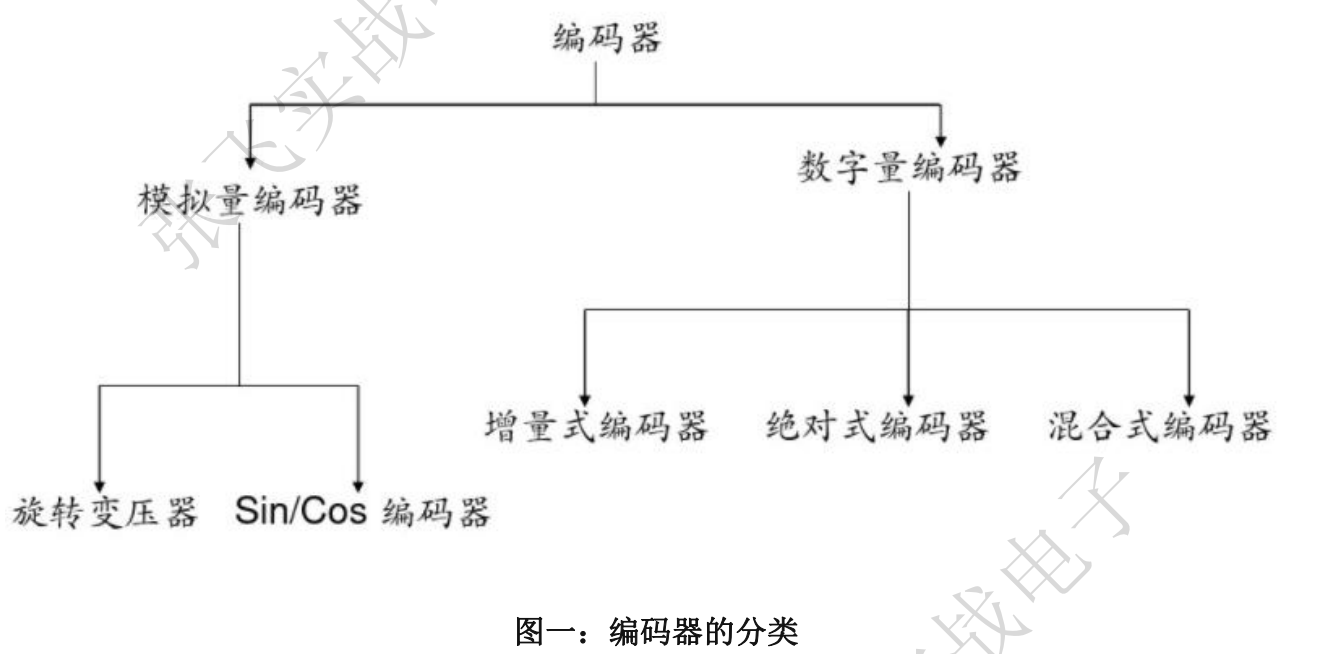
上圖一所示的分類只是其中一種分類方法。另外,按照編碼器運動部件的運動方式來分,可以分為旋轉式和直線式兩種。根據檢測原理,編碼器可以分為光學式、磁式、感應式和電容式。旋轉式光電編碼器容易做成全封閉型式,易于實現小型化,傳感長度較長,具有較長的環境適用能力,因而在實際工業生產中得到廣泛的應用
三、編碼器中常用的術語
1、輸出脈沖數/轉
旋轉編碼器轉一圈所輸出的脈沖數,對于光學式旋轉編碼器,通常與旋轉編碼器內部光柵的槽數相同(也可在電路上使輸出脈沖數增加到槽數的 2 倍,4 倍)
2、分辨率
分辨率表示旋轉編碼器的主軸旋轉一周,讀出位置數據的最大等分數。絕對值型不以脈沖形式輸出,而已代碼形式表示當前主軸位置(角度)。與增量型不同,相當于增量型的“輸出脈沖/轉”
3、光柵
光學式旋轉編碼器,其光柵有金屬和玻璃兩種。如果式金屬制成的,會開有通光孔槽;如果是玻璃制成的,是在玻璃表面涂了一層遮光膜,在此上面設有透明線條(槽)。在槽數少的場合,可以在金屬圓盤上用沖床加工或腐蝕法開槽。在耐沖擊型編碼器上使用了金屬的光柵。玻璃制的與金屬制的光柵相比不耐沖擊,因此在使用上請注意,不要將沖擊直接施加于編碼器上
4、最大響應頻率
是在 1 秒內能響應的最大脈沖數(例:最大響應頻率為 2KHz,即 1 秒內可響應 2000 個脈沖),公 式如下:
最大響應轉速(RPM)/ 60 *(脈沖數/轉)=輸出頻率 Hz
5、最大響應轉速
是指可響應的最高轉速,在此轉速下發生的脈沖都可響應,公式如下:
最大響應頻率(Hz)/ (脈沖數/轉) * 60 = 軸的轉速 RPM
6、輸出電壓
是指輸出脈沖的電壓。輸出電壓會因輸出電流的變換而有所變化
7、格雷碼
格雷碼是高級數據,因為是單元距離和循環碼,所以很安全。每步只有一位變化。數據處理時, 格雷碼必須轉換成二進制碼
8、轉速
改速度指示編碼器的機械載荷限制。如果超出該限制,將對軸承使用壽命產生負面影響,另外信 號也可能中斷
四、增量式編碼器的工作原理
1、基本構造及特點
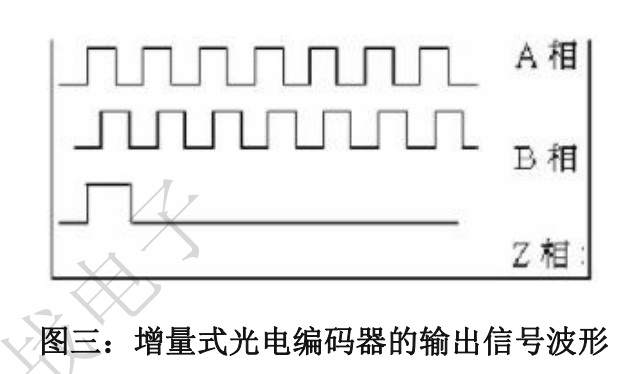
增量式光電編碼器的特點是沒產生一個輸出脈沖信號就對應于一個增量位移,但是不能通過輸出脈沖區別出在哪個位置上的增量。它能夠產生與位移增量等值的脈沖信號,其作用是提供一種對連續位移量離散化或增量化以及位移變化(速度)的傳感方法,它相對于某個基準點的相對位置增量,不能夠直接檢測出軸的絕對位置信息。一般來說,增量式光電編碼器輸出 A、B 兩相互差 90 讀電角度的脈沖信號(也即是兩組正交輸出信號),從而可以方便地判斷出旋轉方向。同時還有用作參考零位的 Z相標志(指示)脈沖信號,碼盤每旋轉一周,只發出一個標志信號。標志脈沖通常用來指示機械位置或對積累量清零增量式光電編碼器主要由光源、光柵板(碼盤)、固定光柵(檢測光柵)、光敏管(光電檢測器件)和轉換電路組成,如下圖二所示:
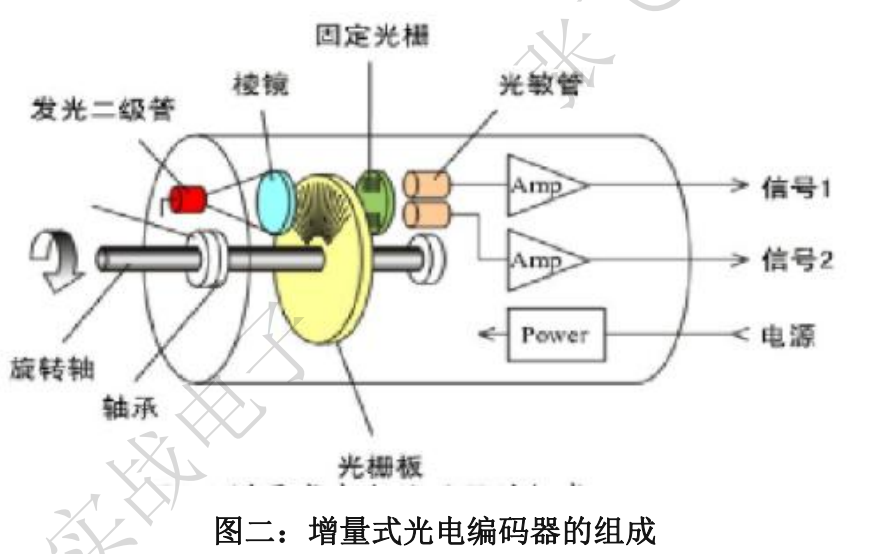
在光柵板上刻有節距相等的輻射狀透光縫隙,相鄰兩個透光縫隙之間代表一個增量周期;檢測光柵上刻有 A、B 兩組與光柵板相對應的透光縫隙,用以通過或阻擋光源和光電檢測器件之間的光線。它們的節距和碼盤上的節距相等。并且兩組透光縫隙錯開 1/4 節距,使得光電檢測器件輸出的信號在相位上相差 90 度電角度。當碼盤隨著被測軸轉動時,檢測光柵不動,光線透過碼盤和檢測光柵上透過縫隙照射到光電檢測器件上,光電檢測器件就輸出兩組相位相差 90 度電角度的近似于正弦波的電信號電信號經過轉換電路的信號處理,可以得到被測軸的轉角或速度信息。增量式光電編碼器輸出信號波形如 下圖三所示:
2、作用原理
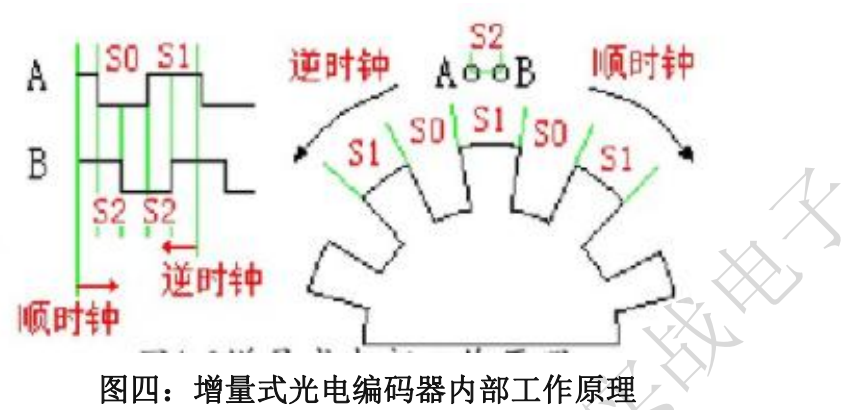
A、B 兩點對應兩個光敏接受管,A、B 兩點間距為 S2,角度碼盤的光柵間距分別為 S0 和 S1。當角度碼盤以某個速度勻速轉動時,那么可知輸出波形圖中的 S0:S1:S2 比值相同,同理角度碼盤以其它的速度勻速轉動時,輸出波形中的 S0:S1:S2 比值與實際圖的 S0:S1:S2 比值仍然相同。增量式光電編碼器內部工作原理示意圖如下圖四表示:
完整版技術文檔請點擊文章開頭普通下載
- 增量旋轉編碼器
- CARLEN增量編碼器數據手冊.英文版 0次下載
- STM32操作增量式編碼器(二)----使用編碼器接口實現定位
- STM32-增量式旋轉編碼器測量
- dsPIC33F系列參考手冊之正交編碼器接口(QEI)
- 編碼器的定義與分類及其工作原理的介紹 25次下載
- AGV應用技術編碼器的原理 14次下載
- 編碼器的設計指南 23次下載
- 基于增量光電編碼器永磁同步電機初始定位研究 10次下載
- 基于增量式光電編碼器位移傳感器研究 99次下載
- 基于FPGA增量式編碼器的接口設計 76次下載
- 基于增量式編碼器的去毛刺算法實現 80次下載
- 高可靠性增量式光電編碼器接口電路設計 169次下載
- 光電編碼器位置檢測研究與應用 86次下載
- 增量編碼器簡介
- 絕對值編碼器與增量式編碼器相比有哪些優勢? 1.4k次閱讀
- 增量編碼器與絕對值編碼器的區別 3.6k次閱讀
- 磁電式編碼器好還是光電式編碼器 2.2k次閱讀
- 增量式編碼器結構應用與工作原理 4.5k次閱讀
- 增量編碼器和絕對值編碼器的區別 5.2k次閱讀
- 磁性編碼器和光電編碼器的比較 5.4k次閱讀
- 光電編碼器分類及作用 9.6k次閱讀
- 絕對值編碼器的工作原理及和增量編碼器有什么不一樣 3.1w次閱讀
- 脈沖編碼器分為哪三種_脈沖編碼器的分類 2.4w次閱讀
- 怎樣安裝增量型編碼器 8.9k次閱讀
- 增量式編碼器與絕對式編碼器的區別 6.5w次閱讀
- 光電編碼器型號含義_光電編碼器應用實例 2w次閱讀
- 編碼器正交編碼工作原理 3.4w次閱讀
- 編碼器元件工作原理及其應用電路 4.1w次閱讀
- ec11編碼器接法及分類介紹,工作原理、性能及應用解析 7.9w次閱讀
 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1山景DSP芯片AP8248A2數據手冊
- 1.06 MB | 532次下載 | 免費
- 2RK3399完整板原理圖(支持平板,盒子VR)
- 3.28 MB | 339次下載 | 免費
- 3TC358743XBG評估板參考手冊
- 1.36 MB | 330次下載 | 免費
- 4DFM軟件使用教程
- 0.84 MB | 295次下載 | 免費
- 5元宇宙深度解析—未來的未來-風口還是泡沫
- 6.40 MB | 227次下載 | 免費
- 6迪文DGUS開發指南
- 31.67 MB | 194次下載 | 免費
- 7元宇宙底層硬件系列報告
- 13.42 MB | 182次下載 | 免費
- 8FP5207XR-G1中文應用手冊
- 1.09 MB | 178次下載 | 免費
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 2555集成電路應用800例(新編版)
- 0.00 MB | 33566次下載 | 免費
- 3接口電路圖大全
- 未知 | 30323次下載 | 免費
- 4開關電源設計實例指南
- 未知 | 21549次下載 | 免費
- 5電氣工程師手冊免費下載(新編第二版pdf電子書)
- 0.00 MB | 15349次下載 | 免費
- 6數字電路基礎pdf(下載)
- 未知 | 13750次下載 | 免費
- 7電子制作實例集錦 下載
- 未知 | 8113次下載 | 免費
- 8《LED驅動電路設計》 溫德爾著
- 0.00 MB | 6656次下載 | 免費
總榜
- 1matlab軟件下載入口
- 未知 | 935054次下載 | 免費
- 2protel99se軟件下載(可英文版轉中文版)
- 78.1 MB | 537798次下載 | 免費
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420027次下載 | 免費
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 5Altium DXP2002下載入口
- 未知 | 233046次下載 | 免費
- 6電路仿真軟件multisim 10.0免費下載
- 340992 | 191187次下載 | 免費
- 7十天學會AVR單片機與C語言視頻教程 下載
- 158M | 183279次下載 | 免費
- 8proe5.0野火版下載(中文版免費下載)
- 未知 | 138040次下載 | 免費



 工商網監
工商網監
評論