BLDC電機的結構是由哪些部分組成的?反電動勢法控制BLDC電機的原理是什么?反電動勢的檢測方法有哪幾種?BLDC電機的起動方式是什么?
2021-08-02 08:04:50
反電動勢過零檢測法的基本原理是什么?反電動勢過零檢測有哪些缺點?正向反電動勢過零點有什么變化?
2021-07-21 06:11:43
請教一下,有一個測試臺需要扭矩3500Nm,轉動慣量1.5kgm2的電機,領導選了一款Krebs的480KW的同步電機,發現這個電機的端電壓460V,反電動勢560V,5000轉時電機頻率500Hz
2024-01-09 06:34:15
永磁同步電機無感控制學習一、永磁同步電機無感控制主要方法概述(一)基于永磁同步電機基本磁鏈關系的轉速和位置估算方法1.直接計算方法可直接檢測的量是定了三相電壓和電流,利用它們計算出轉了位置角和轉子
2021-08-27 06:03:07
永磁同步電機無傳感器控制之滑模控制用哪種比較好?比如說滑模控制有自適應的,卡爾曼結合的,反電動勢的,目前大家用的是哪種,哪種比較好用?
2016-01-29 13:40:53
,dq軸電壓之間是存在耦合關系的,會產生耦合電壓,并且隨著電機轉速的上升,還會產生反電動勢,兩者均會對電機的控制造成影響。因此圖中三個電壓源均來源于此。2PMSM損耗的數學模型根據功率基礎計算方程P
2021-03-24 08:30:00
和電感設置pi參數達到較好的控制效果。但是實際上,當電機運行起來之后,dq軸之間會存在明顯的耦合,更不理想的是,q軸的電壓中,占主導成分的是反電動勢,在一些對環路響應要求較高的場合,使用pi控制并無
2021-08-27 07:17:17
引言應用于永磁同步電機的轉子位置估計方法有多種,常用觀測電機反電動勢或觀測電機磁鏈的方式估計轉子位置,針對不同的觀測狀態量又有多種不同的觀測方法。以下使用滑模觀測器觀測電機反電動勢,進而估計永磁
2021-08-27 08:16:21
1、 電機模型的選擇及參數設置前面章節已經就電機模型的選擇和參數配置進行了說明。下面直接給出仿真使用的電機參數配置圖。電機使用的是3相,反電動勢為正弦,凸極式的永磁同步電機,機械輸入類型為負載轉矩
2021-08-27 06:19:42
分布繞組和永磁轉子,在磁路結構和繞組分布上保證感應電動勢波形為正弦,外加的定子電壓和電流也應為正弦波,一般靠交流變壓變頻器提供。永磁同步電機控制系統常采用自控式,也需要位置反饋信息,可以采用矢量
2014-01-22 09:55:33
這本書的作者是譚建成,內容包括無數直流電機與永磁同步電機的結構和性能比較,無刷電機的數學模型;反電動勢波形及反電動勢計算,等一些列技術探討。推薦課程:張飛軟硬開源,基于STM32 BLDC直流
2018-12-25 19:12:56
怎樣克服反電動勢和利用反電動勢
2021-03-04 07:04:22
電機如何從楞次定律到反電動勢來實現了的運轉?
2021-02-02 06:28:07
有誰知道電機的反電動勢常數大概在怎么樣的一個量綱?就是說大概是多大?
2024-05-15 07:23:06
梯形反電動勢BLDC電機控制技術
2025-03-14 16:22:39
我首先是根據霍爾信號驅動的電機電機轉起來后檢測的反電動勢測的三個霍爾信號均正常但檢測到的反電動勢有兩相是正常的還有一項占空比特別大麻煩幫我分析一下可能是什么原因導致的?萬分感謝上面的是正常的信號,相互之間僅是存在相位差下面的是其中一相反電動勢信號只有這一相占空比大`
2018-05-04 09:35:58
這兩天在學習一些開關電路的知識,在buck電路中一直很好奇一個問題,當開關斷開時,電感會產生一個很高的反電動勢,可是在看很多書上和網上的講解并沒有給出關于反電動勢的說明,求解這個反電動勢去哪兒了?難道因為產生的反電動勢的頻率很高,被LC低通濾波器給濾掉了?
2018-06-19 21:44:50
反電動勢波形,如下圖四所示:圖四:繞組施加電壓與相反電動勢波形從上圖四,我們可以知道,對于具有梯形波反電動勢的電機來說,在懸空相出現過零點時,有以下關系成立:按照同樣的方式,對U,V兩相中出現懸空相時,也能
2021-08-21 09:38:38
(BLDC) 電機其實也是永磁同步電機 (PMSM)中的一種,很多人對BLDC和PMSM的概念比較模糊,因為BLDC電機采用集中式定子繞組,所以會產生梯形波反電動勢。而PMSM電機采用分布式定子繞組,產生
2021-06-09 13:52:52
,兩者連接關系如下圖一所示:上圖一中的待測電機用于測量反電動勢使用,而拖動電機用于將待測電機拖動,這樣便于我們能夠清晰的觀察到待測電機的反電動勢波形。圖一中的連接方式不是最佳的,電機軸與軸之間最好能使
2021-06-21 22:32:29
。下圖五是檢測A相反電動勢正向過零點的示意圖。為了獲得信噪比較高的反電動勢波形,需要利用另外一臺電機拖動永磁同步電機以較高的速度作恒速旋轉。圖五:反電動勢過零點測試示意圖當A相反電動勢正向過零點
2021-09-22 09:41:15
隙內產生接近梯形波的磁場,并在電樞繞組內感生出接近梯形波的的反電動勢;對于自控式永磁同步電機(PMSM)而言,希望其轉子永磁體磁極能夠在氣隙內產生接近正弦波的磁場,并在電樞繞組內感生出接近正弦波
2021-08-06 10:09:14
,反電動勢由轉子磁鏈旋轉而產生,直接觀測轉子磁鏈同樣能夠得到轉子位置。本文將基于永磁同步電機的電壓電流模型,直接對轉子...
2021-06-29 07:10:38
一種基于擴展反電動勢的永磁同步電機無位置控制算法,全部C語言 編寫,含有矢量控制大部分功能(弱磁,解耦,過調制,死區補償等)為了方便學習和工作,該產品結合S-Function進行仿真,且屬于量產產品
2021-08-27 07:30:08
一種基于擴展反電動勢的永磁同步電機無位置控制算法,全部C語言 編寫,含有矢量控制大部分功能(弱磁,解耦,過調制,死區補償等),為了方便學習和工作,該產品結合S-Function進行仿真,且屬于量產
2021-08-27 07:04:43
,電機的運行性能、控制方法、制造工藝和適用場合也會不同。目前,根據永磁體轉子上的位置不同,三相PMSM的轉子結構可以分為表貼式和內置式兩種結構,具體如圖1所示。表貼式內置式圖1 兩種結構的永磁同步電機其中表貼式永磁同步電動機永磁體的用量較小,磁鏈諧波分量較少,更容易產生正弦波磁動勢;內置式無軸承
2021-06-28 09:55:37
得到電感(L)值:5.反電動勢系數和永磁體磁鏈反電動勢系數和永磁體磁鏈其實表征同一個概念,指電機旋轉時,磁鏈產生電動勢相對于轉速的比例關系,反電動勢系數kv的單位為V.s/rad,而永磁體磁鏈單位為
2022-10-12 15:31:27
什么是反電動勢?反電動勢的危害有哪些?
2022-01-14 07:40:01
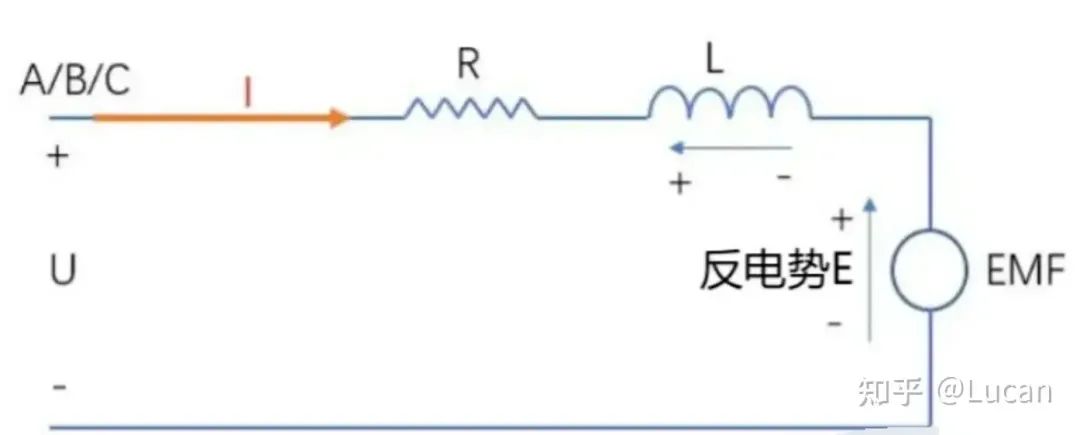
相),其導通時刻的基本電路原理圖如圖 1 所示。1.2 反電動勢的推導無刷直流電機的三相端電壓方程:由于采用兩相導通三相六拍運行方式,任一瞬間只有兩相導通,設 A 相、B 相導通,且 A+,B-,則
2020-07-02 07:00:00
我使用1顆AMC1210+3顆AMC1203,進行永磁同步電機的反電動勢采樣,現在能夠從AMC1210的數據中獲得波形,但是我的疑問是:
AMC1203的輸出是一個PWM的占空比信號,+280mV
2024-12-31 08:24:29
分析了上橋臂PWM調制、下橋臂恒通調制方式時的端電壓波形,討論相應的反電動勢過零點檢測方法.在PWM調制信號開通狀態結束時刻對端電壓進行采樣,由軟件算法確定反電動勢過零點.針對電機運行時存在超前換相
2025-08-07 13:40:49
摘要:分析了上橋臂 WM 調制、下橋臂恒通調制方式時的端電壓波形,討論相應的反電動勢過零點檢測方法.在 NM 調制信號開通狀態結束時刻對端電壓進行采樣,由軟件算法確定反電動勢過零點.針對電機
2025-07-30 16:00:56
提出了基于線反電動勢的轉子位置檢測策略,以實現無刷直流電機的無位置傳感器控制。通過分析無刷直流電機線反電動勢與換相時刻對應關系,得出線反電動勢過零時刻即為換相時刻的結論。然后,檢測兩路線電壓和相電流
2025-07-30 15:53:09
提出了基于線反電動勢的轉子位置檢測策略,以實現無刷直流電機的無位置傳感器控制。通過分析無刷直流電機線反電動勢與換相時刻對應關系,得出線反電動勢過零時刻即為換相時刻的結論,然后,檢測兩路線電壓和相電流
2025-08-07 13:29:30
為什么無感方案電機的啟動如此困難?如何去檢測無刷電機的反電動勢?有哪些方法?無感無刷直流電機(BLDC)最經典的驅動方式是什么?
2021-07-26 13:05:36
“MotorControl Workbench 5.4.4”進行設計,但是在此我們無法確定要為反電動勢信號進行的引腳分配。我們需要設計帶反電動勢(無傳感器)的六步電機控制器。您能否指導如何在“MotorControl Workbench 5.4.4”中配置設計以利用反電動勢反饋到 ADC 引腳?謝謝!
2023-01-17 09:11:58
怎樣去計算無刷電機的反電動勢?如何對無刷電機的反電動勢過零進行檢測?
2021-07-21 07:36:35
怎樣去搭建一種梯形波反電動勢無刷直流電機(BLDC)的模型?如何對梯形波反電動勢無刷直流電機(BLDC)進行仿真?
2021-07-21 06:46:10
如何測量線圈的反電動勢?有相關的測量儀器嗎?或者有什么方法可以測量?謝謝!
2020-11-06 09:49:27
RT,現在需要用橫河DML_2000做FFT看電機的反電動勢波形的奇次諧波,不知道如何操作并查看反電動勢奇次諧波。求大神指教,現有如圖一張反電動勢測量波形。
2016-09-28 14:44:32
繞線的匝數,定子的材料,會影響反電動勢,匝數越高,反電動勢越高,定子材料還會影響效率,一些云圖上顯示的不管轉速多塊,低扭矩的時候,效率都不高,是因為定子在低電流下的磁場強度不高,不是工作在線性區域
2021-09-16 09:25:31
怎么實現基于STM32的反電動勢無傳感BLDC控制?
2021-11-22 06:43:45
怎么看電機的反電動勢波形?用什么方法測電機反電動勢,來個詳細的解答。。。。菜鳥不懂
2016-01-08 16:54:39
怎樣去計算永磁體電機的磁鏈?電機磁鏈和反電動勢系數有何關系?
2021-08-31 06:45:53
述反電動勢公式可以看出,通過檢測A相反電動勢正向過零點即可表明電機位置角θ是否等于0。下圖五是檢測A相反電動勢正向過零點的示意圖。為了獲得信噪比較高的反電動勢波形,需要利用另外一臺電機拖動永磁同步電機以較高
2023-03-09 15:30:26
無刷直流電機方波控制時,利用ADC判斷轉子位置,電機能夠正常平穩安靜轉動,但看反電動勢波形時,有一半是缺失的,請問這是為什么
2021-08-17 11:36:50
反電動勢的定義BLDC電機轉動時,每個繞組都會產生叫做反電動勢(反電動勢)的電壓,根據楞次定律,其方向與提供給繞組的主電壓相反。這一反電動勢的極性與勵磁電壓相反。反電動勢主要取決于三個因素:?轉子
2019-12-10 15:22:44
如圖1所示為電機位置傳感器信號與相反電動勢和線反電動勢的關系曲線。一般而言,當位置傳感器信號發生跳變的時刻即是換相時刻。對于藍色線表示的線反電動勢,當綠色的位置傳感器跳變時,對應的線反電動勢出現
2023-04-04 15:15:34
永磁同步電機(PMSM)與無刷直流電機(BLDC)有何關系?反電動勢檢測的方法可以分為哪幾種?反電動勢檢測方法有哪些不足之處?
2021-07-28 09:34:09
通電相序對應關系的方法。那么,我們本篇文章,根據相反電動勢與相電壓波形同向的原理,通過測量及推導得出霍爾信號與相反電動勢關系,從而得到霍爾信號與相電壓的關系,最終準確確定出霍爾信號與繞組的通電相序
2021-11-08 16:31:09
靜電場是什么意思?采取在電源中性點經消弧線圈接地方式的目的是什么?電路斷開時其電源端電壓與電源電動勢有何關系?
2021-09-24 08:38:29
幾個問題:問題1.拿到一個新電機,如何測量出霍爾信號跟線反電動勢的關系?問題2.相反電動勢跟線反電動勢的關系?問題3.相反電動勢跟相電壓的關系是什么?問題4.怎么通過相反電動勢跟霍爾信號的波形關系確定
2021-06-15 15:51:14
直流無刷電機反電動勢為什么是梯形波?轉子旋轉時,相當于線圈切割磁感線產生反電動勢,但是線圈左右兩側不應該產生相同方向反電動勢嗎?不是相互抵消了嗎?
2018-01-29 22:53:46
變頻調速范疇。通常說的交流永磁同步伺服電機具有定子三相分布繞組和永磁轉子,在磁路結構和繞組分布上保證感應電動勢波形為正弦,外加的定子電壓和電流也應為正弦波,一般靠交流變壓變頻器提供。永磁同步電機控制系統
2016-08-29 19:12:28
一種無刷直流電機的反電動勢過零檢測方法
2018-01-29 17:23:33
電路閉合時電源的端電壓該如何去表示?在直流電路中,電動勢與電壓都有何變化?線圈中磁通變化的頻率與感應電動勢有何關系?
2021-09-18 08:36:24
摘 要:本文以傳統永磁電機 abc 坐標系下的動態數學模型為基礎,推導出繞組開放型永磁電機的數學模型。將模型中的電壓方程分為繞組電阻電壓、繞組自感電壓、繞組反電動勢、繞組間的互感電壓,建立繞組開放型
2025-06-12 13:52:30
電機切換成自動換相后馬上就停下了
使用的是反電動勢比較器換相的方法
2023-10-31 06:54:02
星型繞法的定子,理論上來講,一個時刻只有兩相通電,一相懸空,示波器觀測懸空的一相端點與Y型的中性點之間電壓就可以看到反電動勢波形,但是一般無刷電機只有三端有線引出,中性點并沒有引出線,請問用示波器實際觀測該如何操作?
2024-04-22 06:48:49
電路采用比較器法檢測反電動勢。現在反電動勢檢測電路加了電容能從開環切入到自動換相。但是反電動勢電路不加濾波電容,就無法正常切換了。求助,反電動勢檢測電路不加濾波電容,該如何進行處理???
2019-06-28 00:39:13
反電動勢的BLDC控制,有需要的朋友下來看看
2016-05-05 11:37:39 143
143 無刷直流電機反電動勢估計方法_劉棟良
2017-01-13 14:24:2931 反電動勢是指有反抗電流發生改變的趨勢而產生電動勢,其本質上屬于感應電動勢。反電動勢一般出現在電磁線圈中,如繼電器線圈、電磁閥、接觸器線圈、電動機、電感等。
2017-08-14 16:31:19 36454
36454 
法、基于電感變化的估算法以及反電動勢積分法等。這類方法在電機參數正確的前提下能夠得到較為準確的轉予位置估算結果。直接計算法、反電動勢法、擴展反電動勢法等都屬于這類開環算法。其中直接計算法是由定子電壓、電流等直接計算轉子位
2017-10-27 14:39:5919 電動汽車用永磁同步電機能量來源為蓄電池,對效率要求較高。永磁同步電機因制造技術與實際工作環境因素等,其反電動勢很難保證理想的正弦波形。本文針對永磁同步電機高效率的特點作進一步分析研究,在永磁同步電機
2017-10-28 13:41:0416 以前一直以為反電動勢-------原本是從電機的正極到負極,反電動勢就變成負極往正極流 這概念是錯的。應該是用”來拒去留“ 現在電機從正轉到停止經歷的是電磁感應變小,所以反電動勢方向還是正極到負極。
2017-11-14 09:36:2522872 傳統的基于狀態估計的反電動勢觀測器估計到的反電動勢存在相位滯后,用于永磁同步電機轉子位置估計時會造成估計角度的均值偏差。提出一種改進的反電動勢觀測器,可以無相差估計反電動勢。為消除控制算法、死區效應
2018-02-10 12:10:254 本文首先介紹了反電動勢的概念,其次介紹了反電動勢的決定因素,最后介紹了電機反電動勢的計算公式。
2019-07-15 16:51:5585092 emf通常表示電動勢,但由于它不是物理意義上的“力”,所以起不到任何幫助,但反電動勢仍然在電動機里作為自感應電動勢應用。反電動勢也稱為反抗電動勢,當電動機勻速運行時可以顯著地減小電樞電流。
2019-08-21 08:46:4544969 電壓和電動勢的主要區別是,電壓是反映電場力做功的概念,其正方向為電位降的方向;而電動勢則是反映外力克服電場力做功的概念,其正方向為電位升的方向,兩者的方向相反的,電壓和電動勢的基本單位為伏特(V),此外還有千伏(kV),毫伏(mV)等。
2019-08-21 09:03:5229771 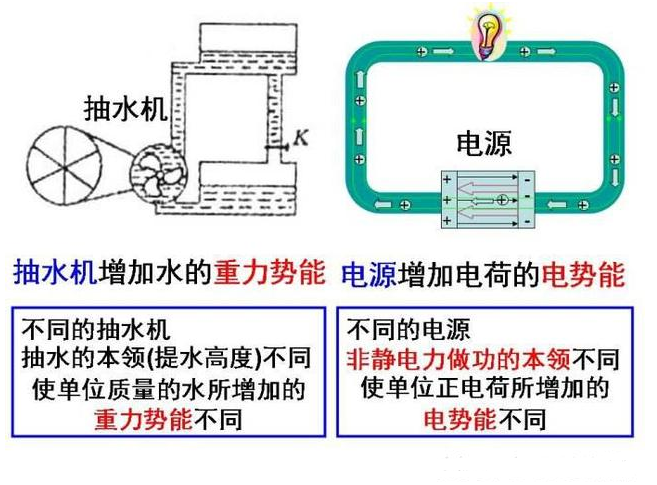
反電動勢與磁通成正比比較圖0-5 (a)和(c)知,在頻率相同的情況下,磁通的振幅值越大,則變化率也越大,反電動勢也越大。就是說,在頻率一定的情況下,定子繞組反電動勢的大小直接反映了主磁通的大小
2019-08-21 09:40:5228363 
電動機運轉時有通過電流的導線。通電導線切割磁感線會產生電動勢。所以此時電動機運轉在切割磁感線,也會產生電動勢。用右手定則判斷,此電動勢的方向和電動機兩端所加電壓相反,所以把這里產生的電動勢稱作反電動勢
2021-02-24 17:08:0530993 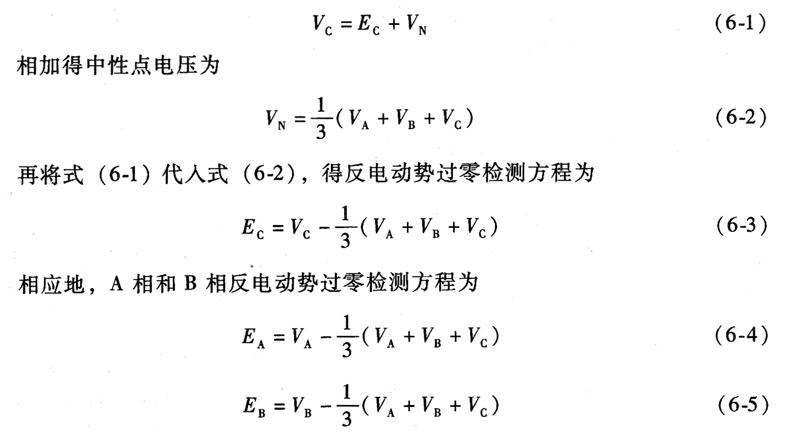
本文實現了讓永磁同步電機在發電機狀態工作,對電機的部分信號進行了說明,觀察驗證了電機反電動勢,根據電機的反電動勢波形計算了電機的極對數,分析了電負載變化時對電機反電動勢的影響,
以及產生影響的原因。
2023-03-13 11:20:241 上一篇文章中提到了使用滑膜觀測器通過估計反電動勢實現轉子位置解算,本質上,反電動勢由轉子磁鏈旋轉而產生,直接觀測轉子磁鏈同樣能夠得到轉子位置。本文將基于永磁同步電機的電壓電流模
型,直接對轉子磁鏈進行觀測,并給出simulink驗證結果。
2023-03-14 13:50:591 電機運行在低速或零速時,磁鏈產生的反電動勢很微弱,可用信號的信噪比太低,因而難以從反電動勢中提取轉子的位置和速度信息。因而在電機處于低速或零
速時,需要借助電機的凸極特性來獲取轉子的位置信息。內置式永磁同步電機或磁密較大的表貼式永磁同步電機具有這種凸極特性,可借助高頻電壓注入法獲取
轉子位置。
2023-03-15 09:38:215 通過擴展反電動勢的反正切就可以獲得電機位置信息,電機的擴展反電動勢與電壓轉速和定子電流有關,在高速重載下因電流變化較大,所以其為擴展反電動勢的重要成分
2023-03-15 10:21:185 電動勢,是導體內電子運動的必要條件,也是電子運動趨勢的一種表現,因而具有一定的方向性。
電動勢的方向,規定為從電源的負極,經過電源內部指向電源的正極,即與電源兩端電壓的方向相反。
反電動勢,是指
2023-03-23 11:43:491 機、電感等。通常情況下,只要存在電能與磁能轉化的電氣設備中,在斷電的瞬間,均會有反電動勢。在繞線式轉子電機中,轉子開路電壓就是好典型的反電動勢反電動勢的危害由于不同類
2021-10-21 17:24:425401 
無刷電機改變反電動勢波形的方法是什么? 無刷電機是一種使用永磁體來產生磁場的電機,與傳統的有刷電機相比,無刷電機具有高功率密度、高效率、低噪音和長壽命等優勢。在無刷電機中,反電動勢是一個重要的參數
2023-12-20 16:00:142124 無刷直流電機反電動勢為什么是梯形波? 無刷直流電機(BLDC)是一種使用電子器件而不是機械刷碳來控制轉子磁場的電機。在BLDC電機中,轉子是由永磁體構成,而定子上則安裝了驅動轉子的多個繞組。當電流
2023-12-20 16:00:184997 永磁同步電機(Permanent Magnet Synchronous Motor,簡稱PMSM)是一種具有高效率、高功率密度、高可靠性和低噪音等優點的電機。在許多應用領域,如工業自動化、電動
2024-06-13 09:37:174539 電機中的反電動勢是如何產生的呢?要了解這個問題,我們需要回顧一下高中時學過的電磁學知識,在電磁學中我們學到過感應電動勢,感應電動勢又分為動生電動勢和感生電動勢兩類。動生電動勢是一種由于導體在磁場中
2025-03-04 14:25:221 大家好,今天這篇文章跟大家分享如何使用 MATLAB 中的 Simulink 來仿真觀察直流無 刷電機的反電動勢波形在正式仿真之前,我們先大致了解下 BLDC 和 PMSM 電機的反電動勢形狀區別
2025-03-24 14:14:113
 電子發燒友App
電子發燒友App









 工商網監
工商網監
評論