通公眾號結(jié)合國家煤礦提升機操作考試最新大綱及煤礦提升機操作考試真題匯總,有助于煤礦提升機操作實操考試視頻考前練習(xí)。1、【判斷題】在井巷采掘工作面的爆破中,單位***消耗量大小取決于***的性能,巖石
2021-08-31 07:34:03
51單片機控制6個舵機的機械臂,現(xiàn)在我做的程序是通過zigbee模塊用電腦鍵盤控制的,兩個鍵字控制一個舵機,這樣需要好多鍵,哪位大神有好的方案或是程序供參考嗎,謝謝
2015-04-29 15:42:32
RS485數(shù)據(jù)上傳接口,可上傳至需要的平臺,供工作人員更加直觀的監(jiān)控提升機各項數(shù)據(jù)
可在手機端遠程查收提升機運行數(shù)據(jù),也可遠程控制提升機的啟停
如果您有其他功能的要求,可隨時聯(lián)系服務(wù)人員進行功能定制。
2024-10-31 14:53:44
機械臂仿真控制
2020-09-29 19:23:16
機械臂的控制-------------控制器1.位置控制機器人最傳統(tǒng),最常用的控制方式就是位置控制,它能以0誤差來達到指定位置或以0誤差跟隨指定軌跡。普通的位置控制,是控制機器人末端到指定的地點(讓
2022-02-23 07:49:01
[四]機械手臂的逆運動學(xué)解正運動學(xué)分析是已知每個關(guān)節(jié)的姿態(tài)的前提下,解算出末端執(zhí)行器的姿態(tài)。而逆運動學(xué)研究的問題是,要求控制末端執(zhí)行器到達某一位置時,各關(guān)節(jié)應(yīng)處于什么姿態(tài)。逆運動學(xué)最基本的思路,是從
2022-01-20 06:46:45
機械臂仿真,用什么軟件效果比較好?
2018-01-18 16:50:01
目錄PWM舵機控制原理STM32CubeMx主要配置TIMER串口配置中斷控制STM32CubeIDE代碼實現(xiàn)通訊協(xié)議設(shè)計STM32代碼實現(xiàn)測試、通常的機械臂都是由多路舵機組成,我使用的是某寶上
2021-07-01 10:24:21
申請理由:項目描述:檢驗系統(tǒng)流暢性,包括外觀布局,以及硬件電路分布的合理性。做過基于PLC的機械臂控制,現(xiàn)在想控制成本,做基于STM32的機械臂控制。
2016-10-28 16:08:46
系統(tǒng)控制的機械臂控制開發(fā)系統(tǒng),這樣可實現(xiàn)由物聯(lián)網(wǎng)對機械臂進行遠程控制,這樣大大地擴大機械臂的操作范圍,對以后工業(yè)化的發(fā)展有著大的提升。項目描述:現(xiàn)正在開發(fā)六軸機械臂控制系統(tǒng),機械臂驅(qū)動器為三洋公司生產(chǎn)
2016-04-27 16:16:59
伺服電機控制性能的優(yōu)越性:(1)低頻特性好。步進電機易出現(xiàn)低速時低頻振動現(xiàn)象。交流伺服電機不會出現(xiàn)此現(xiàn)象運轉(zhuǎn)非常平穩(wěn).交流伺服系統(tǒng)具有共振抑制功能.可涵蓋機械的剛性不足,并且系統(tǒng)內(nèi)部具有頻率解析機能
2018-10-12 09:54:20
題目是基于DSP的三關(guān)節(jié)機械臂軌跡跟蹤控制系統(tǒng)設(shè)計主要任務(wù)是以DSP-TMS320F2812控制器作為機械臂底層驅(qū)動控制器,編寫機械臂運動控制驅(qū)動代碼;然后利用目標(biāo)跟蹤算法,結(jié)合實驗平臺,實現(xiàn)機械臂
2017-04-10 21:42:39
本帖最后由 tangwentao 于 2019-12-16 15:14 編輯背景: 公司本來搞軟件的,現(xiàn)在跟別人合作,要搞個機械臂的東西。要求: 1.這個機械臂要搭載一個攝像頭,然后由于機械臂的運動
2019-12-16 15:33:13
我做的是礦井提升機動態(tài)參數(shù)分析,用labview實現(xiàn)。是基于中國礦業(yè)大學(xué)出版社出版的礦山大型固定設(shè)備測試技術(shù)這本書,我是做里邊的提升機速度圖和力圖,這個應(yīng)該怎么設(shè)計呀?求高人給我指點指點,先謝謝啦{:4_103:}
2013-05-19 23:09:25
定位系統(tǒng),滿足物理科學(xué)研究員和軍事應(yīng)用工程師的需求。將商業(yè)機器人和我們正在申請專利的三球機械臂集成到全新和現(xiàn)有的工作單元中,通過提高現(xiàn)有工業(yè)標(biāo)準(zhǔn)的效率和精度,幫助改進性能。 專業(yè)項目 三球機械臂允許
2015-02-12 15:56:16
。由于傳動件的位置調(diào)整,所以在控制系 統(tǒng)的設(shè)計要求能夠?qū)τ?b class="flag-6" style="color: red">機械臂最終的末端 位置能夠準(zhǔn)確地進行反饋控制。本系統(tǒng)以PCI-7344 為基礎(chǔ),通過NI公司最新的LabVIEW8.2為開發(fā)平臺對3臺伺服電機
2015-02-12 16:10:04
■ 前言這款雙軸機械臂是應(yīng)用于實驗室中進行自動樣品轉(zhuǎn)換的執(zhí)行機構(gòu)。為了能夠在一定范圍內(nèi)將試劑瓶(試管) 完成自動搬運,需要完成對樣品的抓取,提升和放下、水平移動(二維) 等功能。使用帶有肘關(guān)節(jié)
2022-02-18 06:01:26
閉環(huán)控制的步進電機42HS48EIS存在哪些缺點?基于STC8H1K28的雙軸機械臂驅(qū)動模塊該如何去實現(xiàn)呢?
2021-12-21 07:34:40
文章目錄三軸機械臂的控制原理三軸機械臂接線三軸機械臂控制垂直坐標(biāo)系控制立體空間坐標(biāo)系控制三軸機械臂的控制原理參考我寫的博客:Algorithm——逆解算三軸機械臂運動公式得到運動坐標(biāo)三軸機械臂接線
2021-12-13 07:14:08
基于RGB-D相機與機械臂的三維重建無序抓取系統(tǒng)有哪些關(guān)鍵技術(shù)?如何去開發(fā)一款基于RGB-D相機與機械臂的三維重建無序抓取系統(tǒng)?基于RGB-D相機與機械臂的三維重建無序抓取系統(tǒng)是由哪些部分組成的?
2021-09-08 06:12:06
很多小伙伴在使用ROS的時候,都會產(chǎn)生類似的疑問,程序?qū)戇^那么多,仿真也跑過不少,但是如何控制真實機械臂/機器人呢?今天古月君就來嘗試破個題。首先,解決這個問題的關(guān)鍵詞是“接口”。所謂接口,即
2021-09-07 09:12:55
如何實現(xiàn)基于STM32對于三軸機械臂控制器設(shè)計?
2021-12-21 06:46:42
如何實現(xiàn)基于STM32對于三軸機械臂控制器設(shè)計?
2021-12-21 06:37:56
如何對三軸機械臂控制電路讀取肩部角度編碼器ST-3806-15-RS數(shù)據(jù)進行調(diào)試呢?如何對三軸機械臂控制電路讀取肘部角度編碼器ST-3806-15-RS數(shù)據(jù)進行調(diào)試呢?
2021-12-14 07:12:20
如何通過步進電機去控制機械臂?如何通過步進電機去實現(xiàn)一種插補算法?
2021-07-08 06:54:36
工業(yè)機械臂搬運工第一章緒論1.1 本課題研究的背景及意義1.2 機械臂在工業(yè)的應(yīng)用現(xiàn)狀1.3 本課題研究內(nèi)容第二章機械臂工作流程2.1 步進電機工作的基本原理2.2 按鍵控制步進電機工藝流程2.3
2021-11-29 07:19:20
方案需求基于物聯(lián)網(wǎng)的遠程機械臂技術(shù)飛速的發(fā)展,而使得物聯(lián)網(wǎng)成為新一代信息技術(shù)重要組成部分,物聯(lián)網(wǎng)就是物物相連的互聯(lián)網(wǎng),若采用物聯(lián)網(wǎng)來控制機械臂,就可以達到意想不到的結(jié)果,當(dāng)把物聯(lián)網(wǎng)作為輸入設(shè)備,在
2019-03-11 14:12:09
怎樣去設(shè)計一種基于3D打印機的Delta機械臂?有哪些操作步驟?
2021-10-11 08:17:39
現(xiàn)在確定的功能大致如下: 一:賬號登入系統(tǒng)二:基礎(chǔ)功能的遙控:底盤控制,機械臂控制(空間角度機械臂自動調(diào)整為平衡,可通過特殊動作鍵進行控制,控制版空間角度可通過按鍵完成),拍照,燈光控制。三:一鍵
2017-04-26 16:48:42
新手求助怎樣通過ROS去控制機械臂呢?其PRU匯編程序該怎樣去實現(xiàn)呢?
2021-12-21 06:32:14
智能小車如何與機械臂相結(jié)合?
2021-12-27 06:15:24
/適配器(用于Wiimote)帶USB擴展套件的OWI-535機械臂第二步:連接到機器先這樣吧,有人看了再更新
2016-02-18 15:10:14
有些機械臂控制的問題請教大神
2018-01-08 17:18:53
往復(fù)式提升機是整個輸送設(shè)備的核心,系統(tǒng)的穩(wěn)定工作為輸送設(shè)備提供了安全保障。因此往復(fù)式提升機一定要做好日常維護和設(shè)備管理工作,其中柔性輸送機設(shè)備的潤滑工作是設(shè)備維護管理的重要內(nèi)容,合理的潤滑可以控制
2020-11-17 10:19:19
時間,才發(fā)現(xiàn)國內(nèi)開發(fā)的成熟的機械臂控制程序很少!不知大家有沒有興趣,群策群力,共同開發(fā)一套國產(chǎn)的通用的機械臂控制程序,提供給生產(chǎn)廠家使用,及時填補上這個空白。
2014-11-16 16:01:45
——基本——路點,回到命令窗口,設(shè)置路點,可以用手動或者點擊各個關(guān)節(jié)按鈕,將機械臂移動到合適的位置.4.機械手抓取依次點擊結(jié)構(gòu)——URCap——機械爪——EditAction,調(diào)整機械爪的狀態(tài)(抓)。同理設(shè)置第二個路點和機械爪(放),點擊下方...
2021-09-14 06:38:36
、硬件設(shè)計提升機的硬件設(shè)計包括信號檢測環(huán)節(jié)、門控制環(huán)節(jié)、傳送電機控制環(huán)節(jié)、提升機小車電機控制環(huán)節(jié)、變頻調(diào)速及電機拖動環(huán)節(jié)它們之間的互相關(guān)系如圖2所示。圖2 提升機控制原理框圖提升機是典型的順序控制
2011-09-29 09:47:16
`大家您好!我想做一個小型的自動提升機,用12v電瓶帶動變速電機將三斤重的物體堤升到一米左右自動又降回原位,再停留二分鐘,又上升,一直反復(fù)這樣的動作請指教,謝謝了。網(wǎng)購這兩種還需加什么?`
2019-05-07 18:34:13
基于stm32基礎(chǔ)上通過語音模塊控制機械臂的運行,可以控制機械臂進行前后左右活動,并且記憶運行動作
2019-02-07 12:51:28
五軸機械手主臂的負載慣量是如何去計算的?五軸機械手主臂的負載轉(zhuǎn)矩是如何去計算的?
2021-06-28 09:17:36
請問如何通過ROS控制真實機械臂?
2021-10-13 08:25:50
物理綜合與優(yōu)化的優(yōu)點是什么?物理綜合與優(yōu)化有哪些流程?物理綜合與優(yōu)化有哪些示例?為什么要通過物理綜合與優(yōu)化去提升設(shè)計性能?如何通過物理綜合與優(yōu)化去提升設(shè)計性能?
2021-04-14 06:52:32
/id_XNTkxNjgwMDg=.html這里有一個我搜到的 做得挺好的,但是我不知道怎么實現(xiàn)。首先要求是用PIC單片機來做檢測手臂運動來控制機械臂。就是手臂運動狀態(tài)等數(shù)據(jù)采集→PIC→PWM輸出→電機→擺動第一個數(shù)據(jù)采集我
2012-12-23 11:48:58
的快速開發(fā)與發(fā)布。使用產(chǎn)品: LabVIEW 8.20 NI PCI-7344四軸運動控制卡介紹: 盡管對于機械操作臂的研究已不是一個全新的課題,但是,如何在保證機械手臂高的位置精度的條件盡可能地降低
2019-05-06 09:26:38
本期主要介紹一下除了智能螺絲機之外的其他種類產(chǎn)品——HF100系列提升機。提升機是通過改變勢能進行運輸?shù)拇笮瓦\輸設(shè)備,作為輸送系統(tǒng)中必不可少的一類,目前
2022-08-18 14:52:34
本文介紹淮南潘一煤礦提升機電控系統(tǒng)的PLC 改造方案及系統(tǒng)設(shè)計的特點,基于SIMADYN-D 高性能全數(shù)字控制裝置,研制、開發(fā)出礦井提升機全數(shù)字行程控制系統(tǒng)。關(guān)鍵詞:礦井提
2009-08-14 08:40:00 38
38 前言本文的目的是要強調(diào)斗式提升機的潛在危險,這些危險是由于提升機的設(shè)計欠佳,缺乏適當(dāng)?shù)木S修,或是一些可通過安全裝置來控制的故障所引起的.人們正在討論減輕風(fēng)險
2010-08-05 23:09:4416 工廠機械臂人員闖入自動預(yù)警系統(tǒng)基于AI視覺圖像識別算法,工廠機械臂人員闖入自動預(yù)警系統(tǒng)通過實時監(jiān)測工作區(qū)域內(nèi)的人員位置和機械臂設(shè)備的運行狀態(tài),實現(xiàn)對人員闖入的識別和預(yù)警。一旦系統(tǒng)檢測到人員闖入作業(yè)區(qū)
2024-08-27 20:32:40
PLC在礦井提升機控制系統(tǒng)中的應(yīng)用
0 引言
以可編程控制器(PLC)為核心的裝置在礦井提升機中的成功使用,不僅體現(xiàn)了PLC的基本功能,能代替復(fù)雜的
2009-11-27 09:34:29 2327
2327 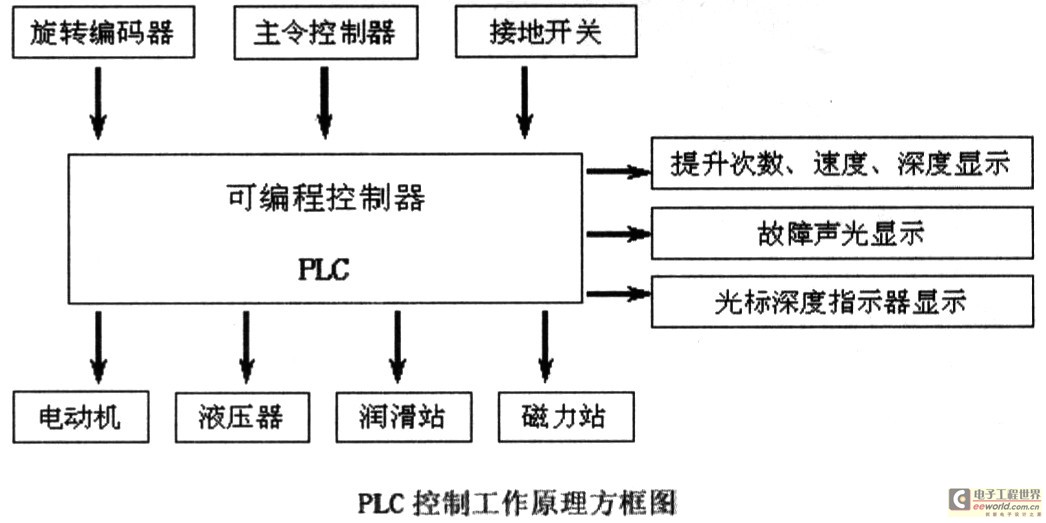
一、系統(tǒng)介紹絞車提升機械(也有稱之為電動葫蘆機械)的提升是運送物料時,把物料提高或放低的功能,根據(jù)絞車提升機械的功率大小,提升的物料
2010-09-20 23:13:501625 
本文闡述了提升機電控系統(tǒng)的設(shè)計思路、交頻器的選型及計算、提升機電控 的控制策略,討論了提升機電控系統(tǒng)中最關(guān)鍵的雙線制保護的實現(xiàn)方法,并對軸 編碼器的脈沖信號數(shù)值化程序及算法進行了優(yōu)化,對整個電控系統(tǒng)進行了i燹||試和 聯(lián)機調(diào)試。 系統(tǒng)設(shè)計按照安全
2011-03-09 16:37:5998 不論何種提升方式,提升機的電氣控制系統(tǒng)都是相同的。TKD-A系列電氣控制系統(tǒng),為已經(jīng)定型的交流拖動控制系統(tǒng),它可以實現(xiàn)對提升機的自動或半自動控制,現(xiàn)以高壓~6kV單電機拖動為
2011-04-19 16:18:420 基于FPGA的系統(tǒng)提高電機控制性能 。
2016-01-07 15:00:1924 改善直接轉(zhuǎn)矩控制性能的SVPWM方法,下來看看
2016-04-15 18:29:164 礦山提升機控制系統(tǒng)
2016-12-20 22:46:0216 ABB變頻器提升機控制應(yīng)用程序
2017-01-21 12:00:293 基于LabVIEW的機械臂控制與仿真系統(tǒng)_華永云
2017-03-18 09:35:1932 基于LeapMotion的機械臂交互控制研究_康楊雨軒
2017-03-19 19:08:356 為了提高機械臂控制系統(tǒng)的性能,使其在運行中動作可控、速度穩(wěn)定、位置精確,本文針對數(shù)據(jù)采集模塊進行研究。本數(shù)據(jù)采集模塊以TI公司的DSP(TMS320F28016)為控制芯片,使用RS232和CAN
2017-11-13 14:31:414 針對機械臂的實時控制問題,基于約束預(yù)測控制,提出了一種機械臂實時運動控制方法。介紹了機械臂動力學(xué)模型并進行了線性化處理,以降低算法復(fù)雜度、保證實時性。設(shè)計了軌跡跟蹤控制器和約束預(yù)測控制器,其中軌跡
2018-03-26 09:33:041 斗式提升機,是一種固定裝置的機械輸送設(shè)備,主要適用于粉狀、顆粒狀及小塊物料的連續(xù)垂直提升。由于輸送材料多為砂粒和小塊狀物料等,經(jīng)常會造成設(shè)備傳動部件磨損等故障,下面跟大家分享兩個經(jīng)典案例,教教大家遇到提升機軸頸磨損故障時該如何修復(fù)。
2021-05-14 14:59:05810 
斗式提升機由料斗、驅(qū)動裝置、頂部和底部滾筒 (或鏈輪)、膠帶 (或牽引鏈條)、張緊裝置和機殼等組成,是利用均勻固接于無端牽引構(gòu)件上的一系列料斗,豎向提升物料的連續(xù)輸送機械,斗式提升機利用一系列固接在
2021-05-19 16:09:45779 
某企業(yè)提升機尾輪軸出現(xiàn)磨損問題,軸承型號:23220CA/W33,軸承位軸徑:φ100mm,修復(fù)寬度:60mm,轉(zhuǎn)速:36r/min。此次需要修復(fù)的是斗式提升機尾輪軸,斗式提升機是一種固定裝置的機械
2021-06-01 15:26:57815 提升機是通過改變勢能進行運輸?shù)拇笮?b class="flag-6" style="color: red">機械設(shè)備,如礦井提升機、過壩提升機等。廣義地說,電梯、天車、卷揚、穩(wěn)車、吊車、啟閉機等均可稱為提升機。提升機一般指功率較大、提升能力較強的大型機械設(shè)備。
2021-06-02 09:19:557879 旭日東提升機是通過改變勢能進行運輸?shù)拇笮?b class="flag-6" style="color: red">機械設(shè)備,如礦井提升機、過壩提升機等。廣義地說,電梯、天車、卷揚、穩(wěn)車、吊車、啟閉機等均可稱為提升機。提升機一般指功率較大、提升能力較強的大型機械設(shè)備。通過
2021-06-03 09:42:088684 基于FuzzyP的多臂機器人機械臂控制系統(tǒng)
2021-06-22 15:07:3613 為什么要進行機械手臂路徑規(guī)劃? 隨著科技的發(fā)展,機械臂由最初的簡單平面搬運逐漸發(fā)展到現(xiàn)在的立體三維空間搬運,其任務(wù)的難度大大提升。因此,在搬運過程中如何精確快速地抓取目標(biāo)物體,成為機械臂發(fā)展亟需
2021-07-12 17:23:323278 提升機是通過改變勢能進行運輸?shù)拇笮?b class="flag-6" style="color: red">機械設(shè)備,某企業(yè)入庫提升機出現(xiàn)軸承位磨損問題,軸承位直徑?220mm,寬度105mm,軸承型號:22244CA/CW33,軸承位單邊磨損0.6-0.8mm。由于該
2021-08-16 15:41:34870 提升機是水泥行業(yè)的重要設(shè)備,但提升機在使用過程中,受到環(huán)境影響或者潤滑不足、軸承質(zhì)量等問題,經(jīng)常出現(xiàn)軸磨損的情況,像這種常見問題,選用修復(fù)快效果好的才是設(shè)備長久使用的關(guān)鍵。下面通過兩個案例來為大家
2021-10-18 15:42:411107 工業(yè)機械臂搬運工第一章 緒 論1.1 本課題研究的背景及意義1.2 機械臂在工業(yè)的應(yīng)用現(xiàn)狀1.3 本課題研究內(nèi)容第二章 機械臂工作流程2.1 步進電機工作的基本原理2.2 按鍵控制步進電機
2021-11-19 12:21:0872 提升機軸維修的方法匯總
2021-12-07 17:48:171 機械臂的控制-------------控制器1.位置控制機器人最傳統(tǒng),最常用的控制方式就是位置控制,它能以0誤差來達到指定位置或以0誤差跟隨指定軌跡。普通的位置控制,是控制機器人末端到指定的地點(讓
2021-12-31 18:57:3111 1. 提升機的基本結(jié)構(gòu)
2. 提升機電器的組成部分
3. 提升機電器的常見故障
4. 提升機電器的日常保養(yǎng)
2022-06-20 09:57:130 小機械臂進行解鎖后,小機械臂在軌測試逐步展開。科研人員首先對機械臂的各項產(chǎn)品進行檢查,其檢查內(nèi)容主要包括了控制器狀態(tài)確認、關(guān)節(jié)檢查、末端檢查等。
2022-08-29 15:39:461217 電子發(fā)燒友網(wǎng)站提供《通過以太網(wǎng)控制的機械臂.zip》資料免費下載
2022-11-03 09:22:401 電子發(fā)燒友網(wǎng)站提供《使用EMG信號控制機械臂.zip》資料免費下載
2022-12-29 11:40:102 電子發(fā)燒友網(wǎng)站提供《人臂控制機械臂開源.zip》資料免費下載
2023-01-31 14:43:054 電子發(fā)燒友網(wǎng)站提供《Python控制的機械臂開源分享.zip》資料免費下載
2023-02-03 10:06:543 使用一個桌面型的六軸機械臂,在機械臂的末端安裝一個攝像頭,來進行 人臉識別和跟蹤 的一個功能。該功能分為兩個模塊,一個是 人臉識別模塊 ,另一個是 機械臂的運動控制模塊 。 ? 在前文有介紹到
2023-02-10 16:07:282624 
使用語音控制myCobot機械臂運動
2023-03-17 18:13:232095 
提升機一般指功率較大、提升能力較強的大型機械設(shè)備,通過動力機械拖動柔性件鋼絲繩及所運輸?shù)呢浳锷舷逻\動完成運輸過程。某企業(yè)提升機在運行過程中出現(xiàn)了軸徑磨損問題,一開始企業(yè)考慮過用補焊這一工藝維修提升機軸徑磨損問題,但是后期并沒有采用,這是為什么呢?
2023-05-17 16:30:190 近期回校上最后一門課,剛好是做機械臂有關(guān)的題目,所以寫文記錄一下。主要實現(xiàn)的是可以自動識別獲取快遞位置,機械臂可以抓取快遞,以及根據(jù)自動識別快遞上的條形碼獲得目的地點,機械臂可
以將快遞抓取并移動
2023-05-18 10:53:415 電子發(fā)燒友網(wǎng)站提供《PC控制的機械臂設(shè)計.zip》資料免費下載
2023-06-12 10:41:592 電子發(fā)燒友網(wǎng)站提供《使用Arm link軟件控制Arduino機械臂.zip》資料免費下載
2023-06-19 14:44:582 提升機是通過改變勢能進行運輸?shù)拇笮?b class="flag-6" style="color: red">機械設(shè)備,是許多水泥企業(yè)里的重要設(shè)備,所以當(dāng)遇到提升機軸磨損的故障時,一定要及時修復(fù),否則就會造成設(shè)備更大的損壞。水泥提升機軸承位磨損修復(fù)實例某企業(yè)入庫提升機底輪
2023-08-04 13:53:121139 
和抗干擾能力的目的,進而運行操作過程中的速度控制和位置控制功能得到了改善,畫面的動態(tài)監(jiān)控功能和保護功能更加穩(wěn)定可靠。逆變器在礦井提升機中的應(yīng)用這一措施將大大提高礦石強化
2023-08-22 15:37:201168 
PLC系統(tǒng)是提升機自動化控制的核心技術(shù)之一,它主要負責(zé)監(jiān)測和控制提升機的各項運行參數(shù),比如提升速度、卸載速度、運載重量、電機電壓電流等。通過對這些參數(shù)的控制和監(jiān)測,PLC系統(tǒng)可以更好的保證提升機
2023-09-18 09:49:371045 阻抗控制存在哪些科學(xué)問題?限制阻抗控制性能優(yōu)化的因素是什么? 環(huán)境建模問題:阻抗控制需要對環(huán)境進行建模,而實際環(huán)境往往非常復(fù)雜,涉及到不同的物體形狀、材料、摩擦力等因素,這使得環(huán)境建模變得十分困難
2023-11-14 15:14:48951 阻抗控制性能提升后對穩(wěn)定性有怎樣的影響?如何權(quán)衡阻抗控制性能與穩(wěn)定性的關(guān)系? 當(dāng)阻抗控制性能提升時,往往需要更高的控制增益來實現(xiàn)更快的響應(yīng)和更小的跟蹤誤差。 這會導(dǎo)致控制系統(tǒng)的穩(wěn)定性受到挑戰(zhàn),因為
2023-11-14 15:26:512279 
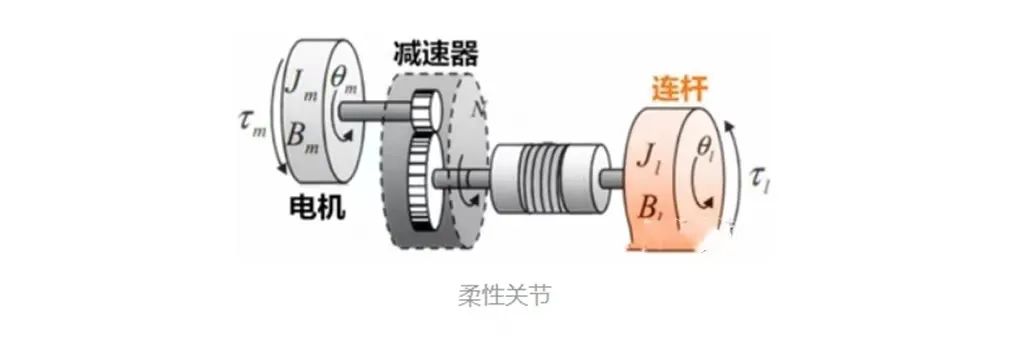
剛性機械臂 機械臂建模是機械臂控制的基礎(chǔ),控制效果的好壞很大程度上決定于所建立的動力學(xué)模型的準(zhǔn)確性。 目前對剛性機械臂的動力學(xué)建模方法較多,理論較為成熟。而對于柔性空間機械臂的精確建模尚處在研究階段
2023-11-17 17:03:341706 機械臂去毛刺主軸是一種高效的自動化去毛刺技術(shù),廣泛應(yīng)用于金屬加工和汽車零部件加工等領(lǐng)域。通過高速旋轉(zhuǎn)的主軸和精確控制的機械臂,實現(xiàn)高精度、高效率、高質(zhì)量的自動化去毛刺作業(yè),提高生產(chǎn)效率和產(chǎn)品質(zhì)量,降低人工操作風(fēng)險,提高作業(yè)安全性。
2023-11-28 13:41:191159 
——來自迪文開發(fā)者論壇本期為大家推送迪文開發(fā)者論壇獲獎開源案例——四軸機械臂控制系統(tǒng)。工程師采用T5L智能屏,基于DGUS軟件“旋轉(zhuǎn)指示”控件實現(xiàn)機械臂的實時位置顯示,并通過串口控制機械臂的運動
2023-12-23 08:13:192408 
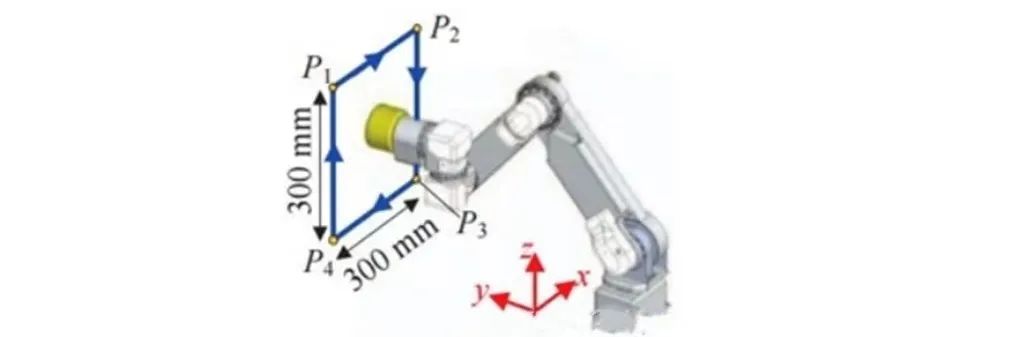
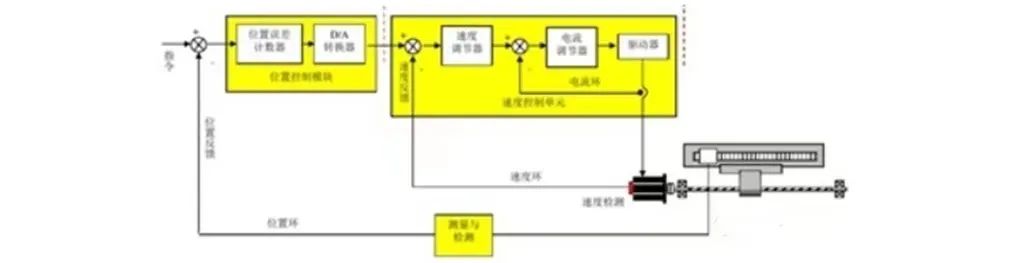
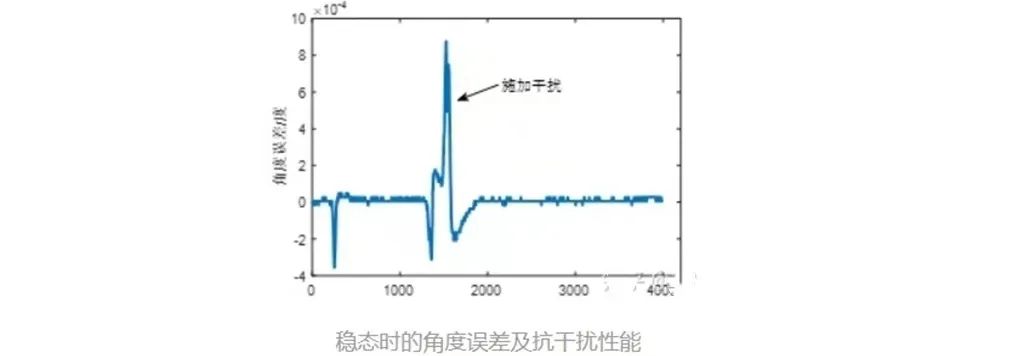
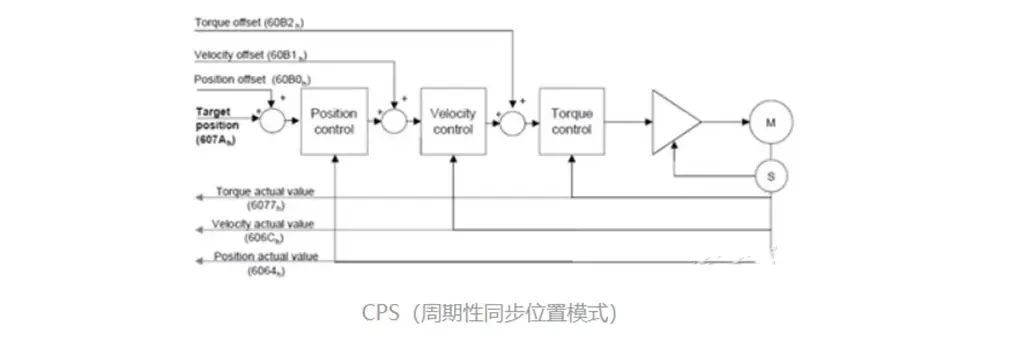
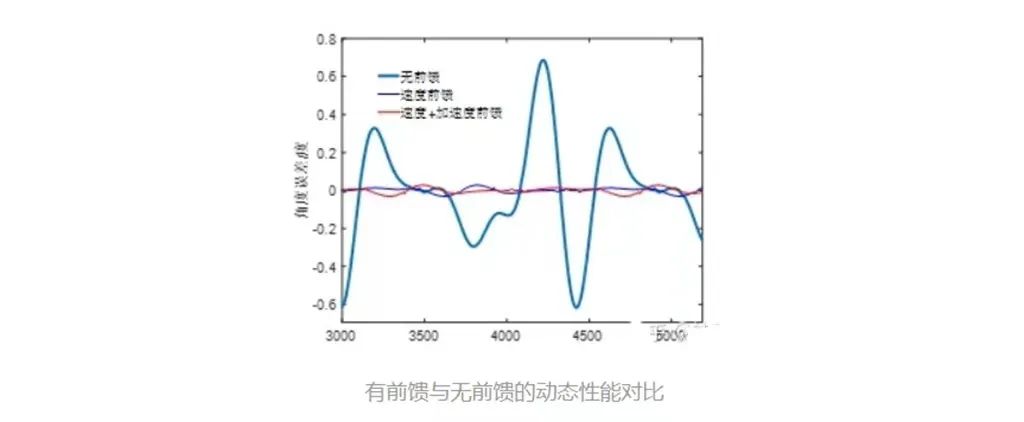
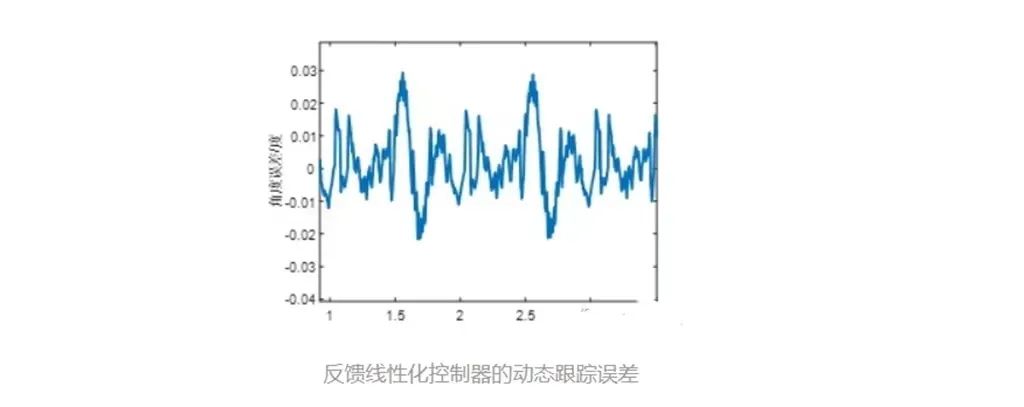
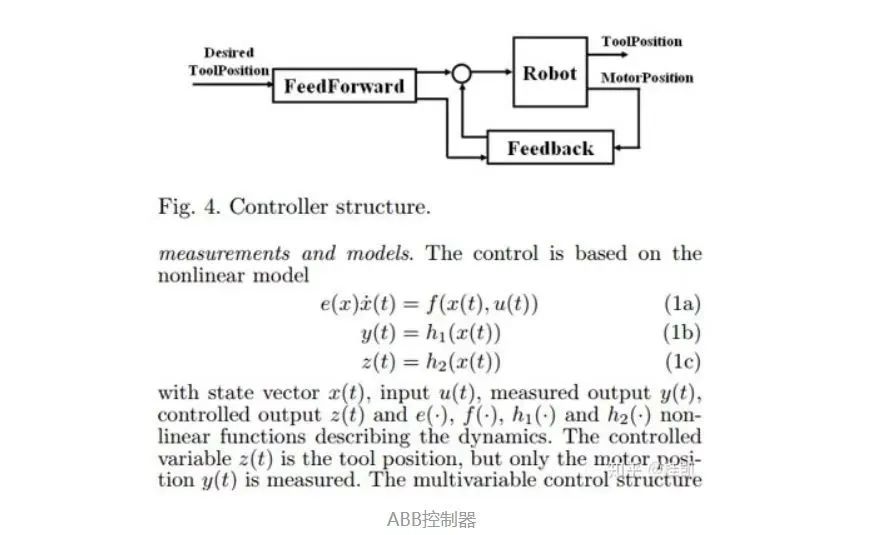
1.背景介紹 機械臂的位置控制是機械臂最重要的功能。機械臂的位置控制精度也是研究者及工程師一直關(guān)注的問題。本文梳理下機械臂位置控制的一些發(fā)展脈絡(luò),幫助大家提高對其的認識以及如何去提升機械臂的位置
2024-03-05 08:43:252334 
純邏輯提升機VFD簡易操作說明
2025-01-13 13:54:350
 電子發(fā)燒友App
電子發(fā)燒友App








 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論