本文介紹如何使用降階隆伯格觀測器(ROLO)估算永磁同步電機(PMSM)的轉子磁鏈位置。
2021-04-02 11:17:41 5454
5454 
導讀:本期文章主要是介紹電壓型磁鏈觀測器和電流型磁鏈觀測器。兩種磁鏈觀測器運用到異步電機矢量控制中,外環磁鏈環用磁鏈觀測器形成閉環,分析電壓型和電流型磁鏈觀測器的觀測性能。
2022-09-06 10:35:373214 由圖(1-1) 可以看出,MPTC控制策略主要由有限控制集、預測模型、定子磁鏈觀測器和價值函數組成。
2023-08-12 15:26:421936 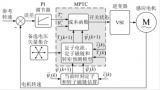
導讀:本期文章對異步電機直接轉矩控制進行梳理學習。DTC包括轉速外環、磁鏈觀測器、滯環和電壓矢量離線開關表。離線電壓矢量開關表分為兩種:添加零矢量和未添加零矢量。
2023-09-25 10:26:071857 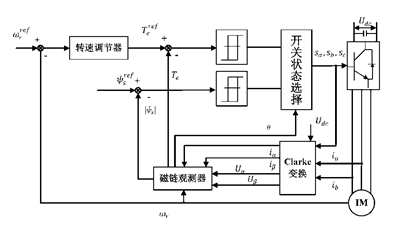
這里有一個完整的異步電機直接轉矩控制的仿真模型,大家可以交流下!
2015-10-09 14:04:10
是短路的繞組,靠電磁感應產生電流。而同步電機的轉子結構相對復雜,有直流勵磁繞組,因此需要外加勵磁電源,通過滑環引入電流;因此同步電機的結構相對比較復雜,造價、維修費用也相對較高。3 異步電機和同步電機
2017-08-19 22:08:19
推薦課程:張飛軟硬開源:基于STM32的BLDC直流無刷電機驅動器(視頻+硬件)http://url.elecfans.com/u/73ad899cfd如圖,異步電機無速度傳感器控制中,觀測器在觀測磁鏈時需要用到轉速信息,而在速度估計時有需要用到磁鏈的信息,這樣不矛盾嗎?
2019-05-21 09:48:53
異步電機基本工作原理 電生磁 三相對稱繞組通入三相對稱電流產生圓形旋轉磁場。 磁生電 旋轉磁場切割轉子導體感應電動勢和電流。 電磁力 轉子載流(有功分量電流)體在磁場作用下受電
2023-03-01 11:57:00
控制系統中,轉子磁鏈難以直接測量。實際采用的是其觀測值,只有當觀測值與實際值相等時,才能達到矢量控制的有效性。因此,準確的獲得轉子磁鏈值是實現矢量控制的關鍵。 按轉子磁場定向異步電機數學模型可推導
2016-01-21 15:40:59
異步電機的矢量控制中磁鏈給定位什么是0.96
2016-04-22 09:01:03
本篇文章為異步電機直接轉矩控制simulink仿真教程。目錄異步電機直接轉矩控制(Asynchronous DTC)完整仿真框圖異步電機模塊磁鏈計算模塊內部結構轉矩計算模塊內部結構磁鏈滯環比較模塊
2021-09-06 06:16:21
直接控制異步電機的電磁轉矩和定子磁鏈,刪掉vector control中的電流環可以獲得更快速的響應,動態性
2021-09-06 09:25:41
學號:課 程 設 計題 目異步電機矢量控制MATLAB仿真實驗(矢量控制部分)學 院自動化學院專 業自動化專業班 級姓 名指導教師曹雪蓮2015年1月7日目錄摘要11異步電動機矢量控制原理22坐標
2021-09-03 07:06:48
學號:課 程 設 計題 目異步電機矢量控制MATLAB仿真實驗(矢量控制部分)學 院自動化學院專 業自動化專業班 級姓 名指導教師曹雪蓮2015年1月7日目錄摘要11異步電動機矢量控制原理22坐標
2021-09-06 06:29:37
轉子磁鏈計算電流模型定子三相電流經3/2變換為靜止兩相坐標系電流,然后經2s/2r變換得到旋轉坐標系mt軸電流,再根據電機數學模型得到轉子磁鏈值,進而得到轉子電流頻率,最終得到轉子磁鏈角,繼續進行
2021-09-06 08:25:21
Modelica標準庫里的異步電機模型過于復雜,為了便于學習,我用最基本的異步電機方程寫了一個Modelica模型,公式參照陳伯時的《電力拖動自動控制系統--運動控制系統》第3版的190頁到195頁
2021-09-06 07:46:52
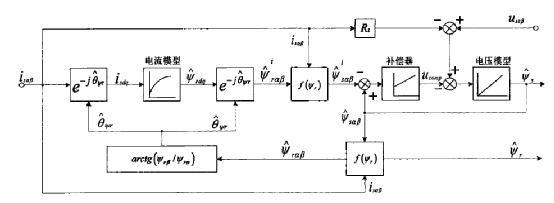
,反電動勢由轉子磁鏈旋轉而產生,直接觀測轉子磁鏈同樣能夠得到轉子位置。本文將基于永磁同步電機的電壓電流模型,直接對轉子...
2021-06-29 07:10:38
三相異步電機公式前面的章節講到三相異步電機是一個非線性,多變量,強耦合的復雜系統,為了方便分析,做如下假設:1)電機定、轉子三相繞組完全對稱。2)電機定、轉子表面光滑,無齒槽效應。3)電機氣隙磁動勢
2021-09-06 07:28:52
摘要:該文以異步電動機直接轉矩控制基本原理為基礎,利用Mmlmlsimaink完成直接轉矩控制系統近似圓形磁鏈控制方法的仿真。采用全速范圍內的電機模型,利用S函數判斷區位置,以離散型開關變量
2025-06-16 21:50:10
摘 要:在異步電動機數學模型的基礎上,討論了失量控制理論及其解耦性質。將異步電動機三相靜止坐標系下的電壓方程、磁鏈方程、轉矩方程分別變換到兩相同步旋轉坐標系下。通過轉子磁場定向技術,使定子繞組電流
2025-06-16 21:43:26
摘 要:根據按轉子磁鏈定向的異步電機矢量控制系統的原理,采用模塊化思想,運用 MATLAB 里的電力電子仿真工具,建立仿真模型,仿真結果表明該矢量控制系統可以使轉子磁鏈不受轉矩變化的影響,實現了轉子
2025-06-16 21:44:36
經典的三相異步電機離線參數辨識MATLAB仿真模型,分步辨識法,辨識電機定子電阻、轉子電阻、互感和漏感。
2019-08-15 13:56:50
模式和發電模式下對閉環電壓電流模型磁鏈觀測器和滑模磁鏈觀測器參數敏感性進行了研究,通過仿真和實驗比較了這兩種觀測器對定、轉子電阻及勵磁電感的敏感性。同時還研究了基于這兩種觀測器的模型參考自適應系統
2025-06-09 16:16:52
`很多網上的異步電機機械特性模型和陳伯時的不同啊,如圖所示,還有個問題,為什么說異步電機的繞組交鏈磁通等于互感加漏感呢?自感就等于互感加漏感呢?為什么?有相關理論推薦嗎?謝謝`
2018-01-30 19:04:56
在家學習一下Simulink自帶的異步電機模型,異步電機是雙饋電機(DFIG、DFIM)的基礎。Mechanical inputSelect the torque applied
2021-07-07 06:20:58
2.2傳統滑模觀測器的仿真結果總結前言本博客傳統滑模觀測器的設計,是在矢量控制策略的基礎上,通過運用滑模變結構理論對反電勢進行估計,進而提取電機的轉子信號和轉速信息。 永磁同步電機的無感控制是通過檢測電機繞組中的有關電信號,采用一定的控制算法進而實現轉子位置及速度估算。這無疑會大大降低電機控制的成本,
2021-08-27 08:07:21
在采用定子磁鏈定向控制策略時,使用simulink自帶的異步電機模型當做雙饋電機使用。但是在仿真時出現如下設置界面不知道參考坐標系選“同步“坐標系對不啊?
2012-09-30 11:31:42
旋轉磁場中受到電磁力的作用,會跟著旋轉磁場一起旋轉,轉子繞組的轉速稱為異步轉速。異步電機是靠切割磁感線感應得來的電動勢,所以要想存在電動勢,就必須不停地切割磁力線,也就是說異步轉速和同步轉速不...
2021-09-03 06:28:54
的定子繞組是相同的,區別在于電機的轉子結構。異步電機的轉子是短路的繞組,靠電磁感應產生電流。而同步電機的轉子結構相對復雜,有直流勵磁繞組,因此需要外加勵磁電源,通過滑環引入電流;因此同步電機的結構相對比較復雜,造價、維修費用也相對較高。2、同步電機與異步電機無功方面的區別相對于異步電機只能吸收無功,同步電機可
2021-07-09 06:04:32
由三個部分組成:主電路逆變模塊,轉子磁連定向控制模塊和SVPWM模塊,下面分別介紹一下這三個模塊。(二)主電路逆變模塊主電路逆變模塊主要由逆變電路和simulink中自帶的異步電機組成,其中為了...
2021-09-06 09:07:57
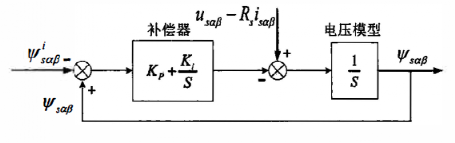
對于觀測器的設計,一般會選取一個數學模型進行參照。而對于PMSM而言,一般會根據電機的電壓模型或者電流模型來設計觀測器。由于電機的負載狀態會影響擴展反電動勢的大小,而電機在高速重載的情況下,定子電流將會有較大的變化。因此,對于估算擴展反電動勢的滑模觀測器,按照PMSM的電流模型來設計會更合理。
2021-08-27 06:52:55
基于WLSVR的交流異步電力測功機觀測器交流變頻異步電力測功機是發動機功率測試的主要設備。它測功機作為發動機的負載裝置,不僅被用來吸收并測量被測發動機輸出的功率,而且可通過控制它的工作狀態改變發動機
2009-05-17 11:56:25
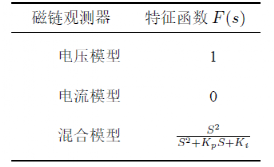
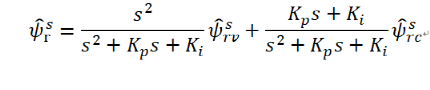
)基于數學模型的磁鏈觀測方案;(2)基于狀態觀測器的磁鏈觀測方案。基于數學模型的磁鏈觀測方案有:電流模型、電壓模型和混合模型[1]。電流模型在低轉速時性能較好;但對電機參數敏感,其估算磁鏈的精度建立在電機參數
2018-10-19 09:55:40
如何利用永磁同步電機的電壓電流模型對轉子磁鏈進行直接觀測?
2021-10-21 07:00:38
如何去實現一種基于磁鏈模型的非線性觀測器設計呢?如何對其模型進行仿真?其波形是怎樣的?
2021-11-19 07:34:36
無速度傳感器矢量控制技術能夠有效提高交流傳動系統的可靠性,降低系統成本。該技術的核心問題是準確獲取電機轉子轉速,并將其反饋到速度閉環控制環節。介紹一種采用改進模型參考自適應轉速估計方法的異步電機矢量
2025-05-28 15:43:39
,但是PLL觀測器的帶寬越大,速度和位置觀測值的噪聲也越大。4.總結基于反電動勢的滑模觀測器對電機數學模型精確度要求不高,當電機的電阻R,電感L因溫度而偏離模型預設值時,滑模觀測器仍能保證轉子位置
2022-10-12 15:23:20
為實現無軸承異步電機轉子徑向位移自檢測,提出一種基于最小二乘支持向量機的位移估計方法。把帶位移傳感器運行時獲取的懸浮繞組的磁鏈、電流,轉矩繞組的電流和位移,作為最小二乘支持向量機的擬合因子,經過離線
2025-07-14 17:45:35
,磁懸浮運算所必需的氣隙磁鏈得不到直接控制,只能根據轉子磁鏈間接觀測得到。本文以4極無軸承異步電機為對象,在轉矩系統氣隙磁場定向的基礎上,以轉矩繞組定子電壓和懸浮繞組定子電流為控制量,利用逆系統方法對無
2025-07-14 17:43:39
為了改善傳統DTC系統中電壓模型定子磁鏈觀測器的動態性能差的問題,針對傳統觀測器存在的直流偏移和初始相位積分誤差問題,提出了一種能顯著改善異步電機動態性能的定子磁鏈觀測方法。該方法采用正交反饋補償
2025-07-15 14:42:29
有人有異步電機的弱磁仿真模型嗎?有可以聯系我,一起交流學習1435176523
2018-03-26 21:10:12
引言應用于永磁同步電機的轉子位置估計方法有多種,常用觀測電機反電動勢或觀測電機磁鏈的方式估計轉子位置,針對不同的觀測狀態量又有多種不同的觀測方法。以下使用滑模觀測器觀測電機反電動勢,進而估計永磁
2021-08-27 08:16:21
要求:1.異步電機不考慮鐵耗的矢量控制仿真2.異步電機考慮鐵耗的矢量控制仿真 3.異步電機在最優轉子磁鏈下加入鐵耗補償的矢量控制仿真4.異步電機在最優電流比下加入鐵耗補償的矢量控制仿真。可以提供仿真數學模型。可以做的聯系qq:1205368612。價格面議。
2016-12-14 17:08:55
、C軸線上。1.2 異步電子的轉子異步電機轉子可以自由旋轉。標準異步電機轉子為鼠籠轉子,但是可以等效為三個空間對稱分布的轉子繞組,相互之間角度差120°(證明略)。如圖1所示,轉子三相繞組...
2021-09-06 07:28:06
提示:文章寫完后,目錄可以自動生成,如何生成可參考右邊的幫助文檔文章目錄前言一、磁鏈方程前言異步電機轉子磁場定向控制提示:以下是本篇文章正文內容,下面案例可供參考一、磁鏈方程...
2021-09-06 08:19:55
(1)三相異步電機參數辨識、直接轉矩控制DTC、矢量控制FOC、基于模型參考自適應MRAS的無速度傳感器矢量控制等各類仿真模型;(2)永磁同步電機參數辨識、初始位置檢測、查表法dq電流查詢表自動生成
2019-07-29 15:41:00
,形成轉子磁場。由此可得,三相異步電機模型可以分為電壓方程、磁鏈方程、轉矩方程和運動方程。電壓方程:定子電壓方程:轉子電壓方程:寫成矩陣方程,用P=:可以簡寫 成:同理推導,磁鏈方...
2021-09-06 07:37:56
負載轉矩觀測器的設計與仿真實現假定負載轉矩在永磁同步電機控制系統中被認作外部負載擾動,負載是不可測的,但是可觀的。從而,依據PMSM數學模型(1)中進行負載轉矩觀測器的設計,具體如下:1.1負載轉矩
2021-09-15 07:56:33
要求:1.異步電機不考慮鐵耗的矢量控制仿真2.異步電機考慮鐵耗的矢量控制仿真 3.異步電機在最優轉子磁鏈下加入鐵耗補償的矢量控制仿真4.異步電機在最優電流比下加入鐵耗補償的矢量控制仿真。可以提供仿真數學模型。可以做的聯系qq:1205368612。價格面議。
2016-12-14 17:10:06
實現高性能直接轉矩控制系統的重要環節是準確地觀測異步電機的定子磁鏈。本文將一種新型的速度自適應磁鏈閉環觀測器,應用于直接轉矩控制系統中,取代了傳統的積分器,
2009-07-06 08:28:42 22
22 直接力矩控制是交流調速中一種新穎、有效的控制方法。首先介紹了異步電機的數學模型,在此基礎上對直接力矩控制進行了理論分析,并介紹其磁通、力矩控制方法,給出磁通觀測器
2009-07-16 09:58:4921 異步電機直接磁場定向控制可以提高電機的動態響應速度,且其磁鏈觀測環節位于反饋通道。
2009-07-18 10:34:4820
分析了異步電機直接轉矩控制控制理論;提出了一種利用電機定子電壓電流,采用新型的混合型定子磁鏈觀測器來辨識異步電機速度的方法;介紹了一種基于TMS320LF
2009-10-15 11:21:5124 基于Hil bert模量頻譜分析的異步電機轉子斷條故障研究:轉子繞組斷條是異步電機最常見故障之一。在分析當前主要診斷方法的基礎上,提出Hilbert模量頻譜分析方法對異步電機轉子斷條
2009-11-18 10:50:5324 采用滑模變結構的異步電機矢量控制系統:根據三相電機和滑模變結構理論提出同時估計異步電機磁鏈和轉速的變結構觀測方法,并同時實時檢測重要的時變電機參數轉子時間常數,
2009-11-18 11:14:4928 本文建立了一種滑模速度觀測器,用于電機轉速的精確觀測。該觀測器充分利用電機狀態方程具有的結構特點,設計出簡單有效的速度估算方法,在轉子磁鏈的估算中無須用到轉子時間
2012-06-11 09:08:4239 本文采用電流預測誤差作為狀態量反饋的磁通觀測器結構,應用模型參考自適應系統原理,給出轉子電阻自適應律算法和速度推算公式,提出基于MRAS 的轉子電阻與轉速自動辨識的異步電動機矢量控制系統新型結構
2016-05-11 15:15:161 雙低通濾波器法改進電壓型定子磁鏈觀測器研究_操張鵬
2017-01-04 16:57:5523 基于定子磁鏈模型的異步電機轉子時間常數辨識_劉和平
2017-01-07 17:01:102 基于反電動勢滑模觀測器的異步電機矢量控制_楊淑英
2017-01-07 18:21:318 異步電機全階磁鏈觀測器反饋矩陣設計_鄧歆
2017-01-08 13:38:536 采用擴展卡爾曼濾波磁鏈觀測器的永磁同步電機直接轉矩控制
2017-01-21 11:49:351 永磁同步電機的定子磁鏈觀測技術是實現直接轉矩控制的基礎。傳統的電壓模型定子磁鏈觀測器中存在著直流偏置、積分飽和等問題,因此本文采用改進的二階廣義積分器(improved second-order
2018-07-11 06:00:0010903 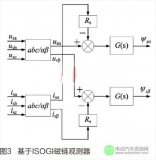
代替常用的電壓一電流模型的方法,結合直接轉矩控制、空間矢量脈寬調劑技術以及船槳模型,建立基于PI-PLL磁鏈觀測器的SVM-DTC系統仿真模型,仿真結果表明,定子磁鏈觀測的精度大幅提高,系統的性能有所改善。
2017-11-08 11:18:4918 為了提高直接轉矩控制(DTC)系統定子磁鏈估計精度,降低電流、電壓測量的隨機誤差,提出了一種基于擴展卡爾曼濾波(EKF)實現異步電機轉子位置和速度估計的方法。擴展卡爾曼濾波器是建立在基于旋轉坐標系下
2017-12-06 10:14:2418 感應電機的轉子磁鏈通常用定子電流進行觀測,易受測量噪聲影響,且觀測模型精度與電機參數有關。當電機內磁場幅值變化時,磁路非線性飽和效應會引起互感參數波動,導致觀測磁鏈的幅值和方向偏離實際值,使控制出現
2017-12-29 15:56:432 針對異步電機功率因數低的問題,對一種新型電機永磁體助磁的雙轉子雙鼠籠異步電機進行了研究。介紹了該電機的基本結構和工作原理,創新性地采用了雙鼠籠的結構,并對籠間磁軛厚度對電機性能的影響進行了分析。利用
2018-03-02 10:53:520 異步電機是一種交流電機,也叫感應電機,主要作電動機使用。異步電機定子相數有單相、三相兩類。三相異步電機轉子結構有鼠籠式和繞線式兩種,單相異步電機轉子都是鼠籠式。鼠籠式電機是應用最為廣泛的異步電動機。繞線式電機結構復雜,一般用于對起動和調速性能要求較高的場合。
2019-06-21 15:29:1219398 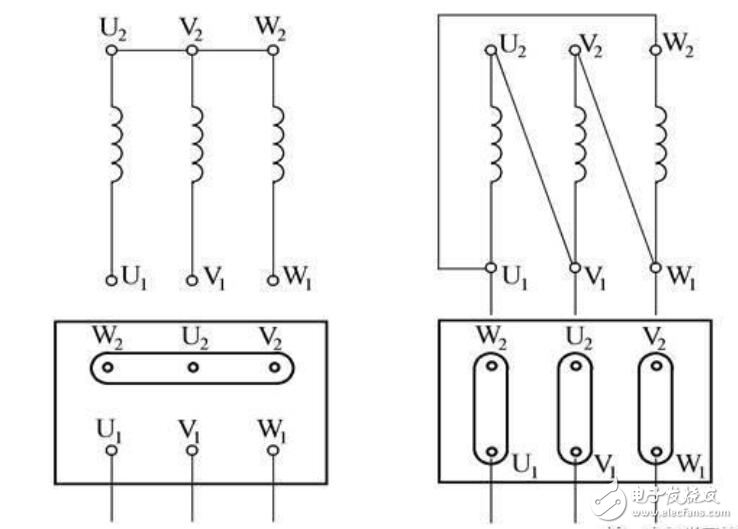
同步電機和異步電機最大的區別在于它們的轉子速度與定子旋轉磁場是否一致,電機的轉子速度與定子旋轉磁場相同,叫同步電機,反之,則叫異步電機。
2019-06-21 15:30:24109955 電機在運轉過程中所需的電源相數不同,在電機的分類上也有不同,三相異步電機就是按電源相數劃分的一個分類。異步電機的使用中三相異步電機是使用最為廣泛的一類。大家要了解三相異步電機可以從三相異步電機的轉子旋轉原理著手!
2021-02-14 17:35:0014347 異步電機直接轉矩控制能產生快速且良好的魯棒性響應,采用自適應磁鏈觀測器,取代傳統的積分器,構造了新型的速度估計器,并結合模糊控制器,實現對定子磁鏈準確觀測和系統無速度傳感器運行狀態。基于DP
2021-05-07 09:40:377 異步電機是一種交流電機,其負載時的轉速與所接電網的頻率之比不是恒定關系。還隨著負載的大小發生變化。負載轉矩越大,轉子的轉速越低。異步電機包括感應電機、雙饋異步電機和交流換向器電機。感應電機應用最廣
2021-08-10 09:45:4427326 導讀:本期主要介紹異步電機的全階磁鏈觀測器。從工作原理到帶入到矢量控制中,比較不同觀測器的估計效果對電機控制性能的影響大小。
2022-11-08 09:34:326606 導讀:本期主要介紹電壓型磁鏈觀測器(voltage flux observer)在靜止坐標系下的表現形式,應用在異步電機矢量控制系統中。
2023-01-29 17:48:182534 同步電機的轉子與電場同步旋轉,轉速與電網頻率成正比,需要外部激勵源才能啟動,如直流勵磁、感應勵磁等。異步電機的轉子在電場作用下發生滑動,轉速略低于電網同步速度,可以直接通過接通電源啟動。
2023-03-07 11:00:0216713 導體和磁芯組成。在工作時,通過給定子通電,產生旋轉磁場,從而激勵轉子中的感應電流,從而產生轉矩。由于轉子和旋轉磁場的速度不同,因此該電機稱為“異步電機”。
2023-03-07 11:11:095552 力矩電機和異步電機之間有幾個重要區別:
工作原理不同:力矩電機是基于磁滯現象的工作原理,而異步電機是基于電磁感應的工作原理。力矩電機的轉子和定子之間存在磁性阻尼,因此當負載增加時,它可以保持較穩定的轉速和輸出力矩,而異步電機在負載變化時可能出現速度和力矩波動。
2023-03-10 14:51:382661 前面的三篇文章已將理論部分基本分析完了,下階段就是對異步電機的矢量控制仿真模型進行搭建,結合前面梳理的理論知識看看矢量控制是不是那回事兒,能不能夠實現這個轉矩、電流和轉
速三個指標的控制,另外,驗證第三篇磁場定向中轉子磁鏈觀測器是否能夠實現磁鏈觀測呢?
2023-03-27 11:22:500 本篇文章為異步電機直接轉矩控制simulink仿真教程。 目錄異步電機直接轉矩控制(Asynchronous DTC)完整仿真框圖 異步電機模塊 磁鏈計算模塊 內部結構 轉矩計算模塊 內部結構 磁鏈
2023-03-29 10:37:307 導讀:本期主要是介紹模型預測電流控制。模型預測電流控制主要包括:轉速環、磁鏈環、磁鏈觀測器、預測模型和 代價函數。
異步電機模型預測電流控制系統的結構框圖如圖1所示。該控制系統與傳統的FOC
2023-03-29 10:14:531 控制,對異步電機在轉子磁場定向下的狀態方程模型進行了推導,并基于狀態方程模型討論了三閉環控制算法的實現,以及MTPA與MTPV的實現方法。然后對開環的磁鏈估計器與閉環的磁鏈觀測器進行了討論。 為了實現異
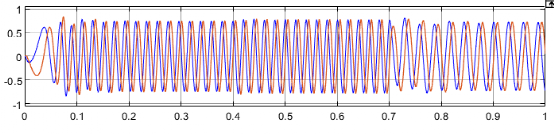
2023-03-29 11:40:509 在做轉子磁鏈觀測器的過程中,輸出的轉子磁鏈和觀測的轉子磁鏈一直存在非常大的偏差,如下圖所示,紅色的是觀測器輸出的轉子磁鏈,而藍色是電機模型輸出的轉子磁鏈,一個基本沒怎么動,一個
卻是符合正弦特性的。
2023-03-29 14:03:090 在鼠籠式異步電機中,轉子機械轉速略小于旋轉磁場的轉速。兩者之間角速度的差異稱作轉差率,并以旋轉磁通速度的百分
比來表示。
例如,如果轉子轉速和磁通旋轉速度相同,則轉差率為0:而當轉子轉速為0
2023-03-29 09:32:372 本期主要介紹電壓型磁鏈觀測器(voltageflux observer)在靜止坐標系下的表現形式,應用在異步電機矢量控制系統中。
磁鏈估計是高性能交流感應電機調速系統中的重要組成部分。而磁鏈在實際
2023-03-30 10:20:261 本期主要介紹電流型磁鏈觀測器(current flux observer)在不同坐標系下的表現形式,應用在異步電機矢量控制系統中。
磁鏈估計是高性能交流感應電機調速系統中的重要組成部分。而磁鏈在
2023-03-30 09:59:431 目錄 電機方程 電壓方程 磁鏈方程 定義狀態變量和輸出變量 非線性觀測器方程 電角度的計算--鎖相環 鎖相環調參電機方程 電壓方程 磁鏈方程 定義狀態變量和輸出變量 非線性觀測器方程在對反電勢進行
2023-05-06 14:31:1612 導讀:本期文章主要介紹異步電機速度估計的方法-混合模型磁鏈觀測器法。對該方法的原理進行簡單介紹和進行仿真驗證。
2023-05-18 09:43:141764 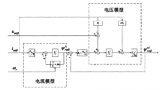
導讀:本期文章主要介紹異步電機的改進型電壓模型磁鏈觀測器。傳統純積分形式的積分器在低速區域存在初始值問題和直流偏置問題,所以在實際應用中必須對電壓模型進行改進。本期文章中的對電壓模型改進是借鑒一篇IEEE中的方法。
2023-08-19 16:00:552931 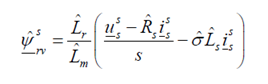
矢量控制(FOC, Field Oriented Control)在轉子磁場定向的前提下,將定子電流分解成勵磁分量和轉矩分量
2023-09-15 17:03:482462 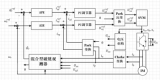
導讀:異步電機直接矢量控制需要通過磁鏈觀測器來獲取同步角,用于控制過程中的坐標變換。
2023-11-09 11:24:102680 
的轉子是由繞組組成的鋁棒,它通過感應電磁力的作用與旋轉的磁場相互作用而轉動。異步電機的轉子速度略低于旋轉磁場的速度,這也是它的名字的由來。同步電機的轉子和旋轉磁場的速度是同步的,通常是通過提供初始勵磁電流來實現的。
2023-12-09 15:55:395091 異步電機的轉子條數是指轉子上的導體條數,通常用于描述電機的繞組類型和結構。轉子條數對于電機的功率、轉速、效率等性能有著重要影響。 在下面的文章中,我將詳細介紹異步電機中的轉子條數的定義、影響等方面
2024-02-01 15:36:413025 直播預告掃碼購買課程&預約直播直播亮點1、FOC無感控制框圖分析2、電機數學模型回顧3、轉子位置角求取思路4、滑模觀測器思路分享5、滑模觀測器的實現直播大綱1、無感FOC控制框圖分析2、電機
2025-08-05 08:06:49983 
 電子發燒友App
電子發燒友App









 工商網監
工商網監
評論