針對自主移動機器人沿墻導航過程,設計一種收發一體式超聲波傳感器與步進電機組成的探測系統。
2014-07-08 16:55:12 2045
2045 電子發燒友網訊:下面給大家介紹一個超聲波導航機器人,總共花費了35美刀,為了做著玩意我用了五個小時。下面就是我用到的材料。
2012-08-09 12:52:0432104 機器人關節是機器人各個零部件之間發生相對運動的機構。關節之中,單獨驅動的為主動關節,反之稱為從動關節。機器人關節模組通常采用超聲波電機、伺服電機、諧波減速器、VR減速器、行星齒輪箱電機等。機器人關節
2021-05-27 11:26:11
機器人通過各種傳感器系統感知外界環境和自身狀態,在復雜的環境自主移動并完成相應的任務,在眾多傳感器中超聲波傳感器以其獨有的特征而被青睞。對于機器人的應用來說,超聲波傳感器主要用來探測物體的距離以及
2020-08-18 10:23:23
```` 移動機器人想要在完全陌生的環境中(沒有預先錄入地圖的情況下)實現智能導航,顯然不是那么簡單。所以,移動機器人實現智能化的第一步,當然是像人一樣擁有“眼睛”和“小腦”,擁有自主定位、導航、避
2018-01-03 11:41:55
。是的,你的猜測和我的一樣好,這些機器人主要用于軍事,太空探索和深海探索。機器人收集的數據被發送回基站,用于研究課題。半自主機器人機器人在正常情況下自動工作,但我們可以手動控制它們完成特定的任務。這些是半
2022-03-31 10:31:31
無人機越來越受歡迎,用于拍攝震撼的的片段、運送救援物資,甚至用于競賽。大多數無人機使用各種傳感技術實現自主導航、碰撞檢測和許多其他功能。超聲波傳感尤其有助于無人機著陸、懸停和地面跟蹤。無人機降落輔助
2022-11-11 08:12:22
在一山谷叫一聲“你好嗎”,不一會聽見好像有人學你的說話一樣“你...好...嗎...”。人們正由此點,開發出超聲波測量技術。像自然界中,以蝙蝠都可算為代表了,在蝙蝠洞里既要覓食,又要用聲波測距,而要在洞內
2018-10-29 14:53:48
`隨著傳感器技術的推廣應用,機器人的發展也備受關注,同時也因為傳感器技術的進步,使得工業機器人的發展有了支持。在機器人中使用的超聲波傳感器是一個電子模塊,測量距離在3cm到400cm之間。它可以
2018-08-09 15:19:59
、醫療服務、家庭娛樂、軍事和航天等其他領域。機器人是工業及非產業界的重要生產和服務性設備,也是先進制造技術領域不可缺少的自動化設備。本文主要針對超聲波傳感器在機器的應用做一個簡單的介紹。 移動機器人要
2019-02-27 23:29:58
提供重要的數據支持。
(三)水下機器人導航
對于水下機器人來說,超聲波水下測距換能器是其導航系統的重要組成部分。它可以實時測量機器人與周圍障礙物的距離,幫助機器人在復雜的水下環境中安全地航行,避免碰撞
2025-06-26 10:43:32
的距離信息(距離和方向)。本文所介紹的三方向(前、左、右)超聲波測距系統,就是為機器人了解其前方、左側和右側的環境而提供一個運動距離信息。 超聲波測距原理 1、 超聲波發生器 為了研究和利用超聲波
2008-10-15 15:23:13
生產線上,超聲波測距換能器可用于檢測產品的位置、尺寸和形狀,實現自動化的分揀、裝配和質量檢測。例如,在汽車制造中,它可以精確測量零部件的位置,確保機器人準確無誤地進行焊接、裝配等操作,提高生產效率和產品質量。
物流
2025-07-02 16:20:55
超聲波測距電路設計由于超聲波指向性強,能量消耗緩慢,在介質中傳播的距離較遠,因而超聲波經常用于距離的測量,如測距儀和物位測量儀等都可以通過超聲波來實現。利用超聲波檢測往往比較迅速、方便、計算簡單
2009-12-15 16:10:31
簡單、易于實現實時控制,并且在測量精度方面能達到工業實用的指標要求,因此為了使移動機器人能夠自動躲避障礙物行走,就必須裝備測距系統,以使其及時獲取距障礙物的位置信息(距離和方向)。因此超聲波測距在
2016-04-18 20:56:27
)。本文所介紹的三方向(前、左、右)超聲波測距系統,就是為機器人了解其前方、左側和右側的環境而提供一個運動距離信息。 二、 超聲波測距原理 1、 超聲波發生器 為了研究和利用超聲波,人們已經設計和制成
2008-10-15 15:25:58
此本領。它們可以利用超聲波“導航”、追捕食物,或避開危險物。大家可能看到過夏天的夜晚有許多蝙蝠在庭院里來回飛翔,它們為什么在沒有光亮的情況下飛翔而不會迷失方向呢?原因就是蝙蝠能發出2~10萬赫茲
2020-11-09 08:55:26
、工作電流增大、工作效率降低等一系列問題。如今隨著中國科學技術的不斷發展,特別是與傳統電磁電機有著不同驅動機理和結構的超聲波電機的出現,使其為直接驅動機器人提供了理想的執行器。
2020-12-10 11:09:26
基于超聲波避障技術是建立在獲取機器人前方障礙物的距離和位置信息上,故超聲波避障技術主要運用超聲波傳感器,根據超聲波測距原理,結合矩陣式結構設計理念的數據融合對機器人前方障礙物的距離和位置進行定位。
2020-05-11 07:23:15
中應用的傳感器種類繁多,例如視覺傳感器、電子羅盤、加速度計和超聲波傳感器等都是仿人機器人中常用的傳感器。DF-1機器人是我院自主研制的一款仿人機器人。本文首先對DF-1機器人總系統進行了介紹,然后
2019-09-18 06:17:46
引腳電平函數三、程序實現:運行效果:一、HC-SR04超聲波產品應用領域:1、機器人避障 2、物體測距 3、液位檢測 4、公共安防 5、停車場檢測超聲波傳感器模塊上面通常有兩個超聲波元器件,一個用于發射,一個用于接收。電路板上有4個引腳: VCC (正極)、Trig (觸發)、Echo (回
2022-01-07 06:08:09
、HC-SR04超聲波測距模塊原理1.模塊簡介HC-SR04超聲波模塊常用于機器人避障、物體測距、液位檢測、公共安防、停車場檢測等場所。HC-SR04超聲波模塊主要是由兩個通用的壓電陶瓷超聲傳感器,并加外圍信號
2021-12-06 07:14:23
SLAM技術作為機器人自主移動的關鍵技術,讓很多人都誤解為:SLAM=機器人自主定位導航。 其實,SLAM≠機器人自主定位導航 ,不解決行動問題。 SLAM如其名一樣,主要解決的是機器人的地圖構建
2018-08-24 16:56:24
進行導航、定位。利用WiFi和藍牙和電腦進行通信,和人進行互動,同時本人還開發過簡單的APP然后可以通過手機發送一定的指令。
2016-04-05 12:17:40
本帖最后由 數碼小葉 于 2015-3-4 15:08 編輯
卡酷機器人有著可愛的造型,其一就是那雙眼睛,(測試階段,成品圖來源于網絡)而實際就是一個超聲波傳感器,利用這個超聲波傳感器
2015-02-21 13:54:11
機器人定位導航方式目前機器人常用的定位導航方式有激光定位導航、視覺定位導航、紅外線定位導航、超聲波定位導航、GPS全球定位導航等。1.激光定位導航激光雷達+SLAM技術相結合的激光定位導航主要是通過對目標
2018-10-11 17:49:40
上傳播的。因此,我們得到了下面的速度-時間方程:只需要簡單的乘法和除法運算,這個計算就可以用極其簡單和廉價的微控制器來完成。聲束角在超聲波發射機中的應用就像蝙蝠從嘴里發出超聲波啁啾,然后用耳朵聽到響應一樣,超聲波
2022-04-11 10:24:54
自動控制、建筑工程測量和機器人視覺識別等領域應用非常廣泛。超聲波測距一般采用渡越時間法。超聲波測距的實質是時間的測量,即:用超聲脈沖激勵超聲探頭向外發射超聲波,同時接收從被測物體反射回來的超聲波(簡稱
2022-01-06 08:04:11
龍人四足機器人是一種仿生機器人,由Openduino控制板控制,有四條腿,每條腿兩個自由度,由兩個舵機驅動,能實現兩種步態行走。配有三個超聲波,實現大角度智能避障。標準演示程序有5個可愛的表演動作。重要技術點: 四足機器人的行走步態設計、舵機的梯形速度控制、多路舵機的協調控制
2016-03-24 16:17:53
,可以實現企鵝機器人對前方障礙物的識別,從而實現企鵝機器人的智能避障和互動表演。重要技術點:行走結構、行走步態、語音播放、超聲波導航。
2016-03-29 17:29:52
上位機控制的遠程控制,在上位機上可以實時顯示機器人的前進視角,該機器人上安裝有超聲波等傳感器,可以自動越過障礙,自動控制前進運行。遠程采用WiFi與電腦通信。供電采用的是7.2伏的鉻鎳電池。手柄采用的是NRF24L01模塊進行雙機通信。
2016-07-31 13:14:17
`這是創客集結號的作品四足機器人身體和四足都是通過3D打印技術打印出來的,通過自己安裝連接上超聲波傳感器,制作成功的四足機器人完全就很了。`
2018-09-29 09:55:09
。3.1.1 控制協調層的硬件實現 機器人傳感器的選取應取決于機器人的工作需要和應用特點。這里選用超聲波傳感器、紅外傳感器、電子羅盤及陀螺儀,采集機器人周圍環境信息,為機器人避障、路徑規劃提供幫助
2019-07-04 08:30:00
摘要:針對自主移動機器人沿墻導航過程,設計一種收發一體式超聲波傳感器與步進電機組成的探測系統。介紹此系統的結構和軟硬件設計。實驗總結超聲波波束與目標物的入射角大小對測距穩定性的影響,提出搜尋離墻
2018-11-02 16:04:48
單獨導通作為基準坐標,I,Ⅱ同時導通用來判斷旋轉方向,Ⅱ單通作為機器人沿墻回歸時的導航基準。 通過步進電機帶動一體式超聲波傳感器轉動,以傳感器中軸垂直于機器人車體的方向作為其自身姿態調整的坐標
2012-01-19 13:45:49
是移動機器人研究的一個基本問題。障礙物與機器人之間距離的獲得是研究安全避障的前提,超聲波傳感器以其信息處理簡單、價格低廉、硬件容易實現等優點,被廣泛用作測距傳感器。本超聲波測距系統選用了SensComp
2009-12-15 10:20:19
一款非常出色的低成本通用型傳感器。 行人檢測超聲波傳感器MB1010應用和操行人檢測安全運動檢測可電池供電自動導航教育和愛好機器人學避免碰撞 行人檢測超聲波傳感器MB1010波束圖: 行人檢測超聲波傳感器MB1010選型:
2019-03-01 04:53:41
懸空)。傳感器模塊使機器人對周圍環境做出正確判斷,為順利完成任務提供智能決策。 (1)超聲波測距傳感器模塊 室內吸塵機器人由于工作環境的原因,必須具備檢測各種大小、高低、顏色的障礙物,超聲波是一
2018-11-06 16:01:27
較小、反射能力較強[1]。且超聲波測距系統結構簡單、電路容易實現、成本低、速度快,所以在工業自動控制、建筑工程測量和機器人視覺識別等領域應用非常廣泛,它具有非接觸式測量、精度高、范圍寬和安裝維護方便等
2018-09-05 16:13:22
超聲波測距是一種典型的非接觸測量方式。超聲波在氣體、液體及固體中以不同速度傳播,定向性好、能量集中、傳輸過程中衰減較小、反射能力較強。且超聲波測距系統結構簡單、電路易實現、成本低、速度快,所以在工業
2022-01-06 06:56:42
,并且在測量精度方面能達到工業實用的要求,因此在移動機器人研制上也得到了廣泛的應用。1、基于atmegal16單片機的超聲波測距短信上傳設計-超聲波-GSM-(原理圖+程序源碼)2017-...
2021-12-08 06:37:46
,并且在測量精度方面能達到工業實用的要求,因此在移動機器人研制上也得到了廣泛的應用。1、基于atmegal16單片機的超聲波測距短信上傳設計-超聲波-GSM-(原理圖+程序源碼)2017-507
2021-07-13 08:16:19
`外國牛人造超聲波避障自我充電智能機器人(圖文)`
2012-08-15 20:50:46
`外國牛人造超聲波避障自我充電智能機器人(圖文)`
2012-08-20 19:38:02
怎樣去實現ROS機器人的定位導航呢?如何對ROS機器人的定位導航進行仿真?
2021-12-23 09:22:45
比空氣要輕,所以上浮到罐頂部,形成了一層對超聲波脈沖有吸收和散射作用的蒸汽層。可以通過加裝導波管的辦法,可以減少或削弱蒸汽層對測量的影響。 4.盲區對超聲波液位計影響: 超聲波液位計的盲區,就如
2016-04-01 14:27:36
`隨著中國科學技術發展迅猛,未來中國將成為為微型智能機器人大國。如今智能機器人需求量不斷增長,其控制系統和自動化主要的產品超聲波電機的需求也將大幅度增長,機器人手指關節用超聲波電機作為微型智能機器人
2020-11-02 11:21:13
超聲波電機一般安裝在機器人手指關節處,機器人的關節驅動離不開伺服系統,機器人關節越多,對柔性及精準度就越高,所需的超聲電機數量就越多。機器人對關節驅動電機的要求非常嚴格,因為超聲波電機具有以下優勢
2020-11-24 11:30:02
怎么實現三路超聲波避障移動機器人平臺的設計?
2021-11-10 07:00:11
定位導航技術使機器人即使在無人操控的情況下,也可實現自主行走、避障及順利到達目的地,機器人和人類繪制地圖一樣,在描述環境及認識環境的過程中都需要依靠地圖,它主要利用地圖類描述其當前環境信息,并隨著
2020-08-18 06:47:00
主要通過反射式測距來定位物體,類似于蝙蝠通過三角定位來計算物體和自己的距離,超聲波測距受多徑效應和非視距傳播影響很大,對電路的制造成本要求較高,目前很少有掃地機器人是采用這種原理。二、采用藍牙定位還有
2021-09-14 06:02:26
導航,前置超聲波傳感器對料塊進行方向和距離定位,安裝在手爪的顏色傳感器識別料塊顏色進行分類,三自由度機械手完成碼垛任務。重要技術點: 機器人循線、機械手運動控制、超聲波測距定位和顏色識別。`
2016-04-01 14:18:48
紅外遙控擂臺機器人是中國教育機器人大賽擂臺賽的標準競賽平臺。機器人利用前端QTI傳感器探測黑色場地,避免機器人跑出場地。通過紅外遙控器遙控機器人,將對手推出黑色場地。 重要技術點:場地邊沿探測、紅外遙控解碼、超聲波搜索算法、紅外搜索算法
2016-03-24 10:35:37
智能搬運機器人能實現小型柱狀物料顏色識別及搬運,能夠輕松完成中國教育機器人大賽的智能搬運競賽任務。機器人的移動由兩輪伺服電機驅動,萬向輪協助轉向,并用多個循線傳感器輔助完成復雜路線導航,前置超聲波
2016-03-24 10:32:24
中國教育機器人大賽的智能搬運競賽任務。機器人的移動由兩輪伺服電機驅動,萬向輪協助轉向,并用多個循線傳感器輔助完成復雜路線導航,前置超聲波傳感器能對前方進行掃描,實現方向和距離定位,安裝在車體前端的顏色傳感器識別料塊顏色進行分類,并搬到相應顏色區域。重要技術點: 機器人循線、超聲波測距定位和顏色識別
2016-04-01 14:55:07
、超聲波測距功能和機器人跟隨等功能。該作品還可以在外觀上還可以進一步完善,美觀化、人性化,更加方便球手使用。 表1:系統抗干擾能力測試和功能測試 
2013-10-27 18:20:36
等同于自主定位導航。那么,在實際應用時,SLAM究竟是如何實現的?在實現過程中又有哪些難點?下面將為大家一一解答。當我們身處異常,導航軟件和戶外地圖成為我們找路最有利的工具,服務機器人和人類一樣也
2018-10-10 16:29:21
中游刃有余。D*算法的最大優點是不需要預先探明地圖,機器人可以和人一樣,即使在未知環境中,也可以展開行動,隨著機器人不斷探索,路徑也會時刻調整。以上是目前大部分移動機器人都需要的路徑規劃算法,而掃地機器人
2017-08-01 13:50:56
` 激光導航AGV底盤定制蘇州智偉達機器人科技有限公司坐落于-蘇州相城經濟開發區陽澄湖國際科創園,是一家致力于機器人的研發、設計、銷售、安裝的的一體化企業。公司目前與大學科研機構以及相關企業展開緊密
2017-06-10 14:24:17
,這樣可以有效地避免干擾,為了提高實時性可以控制定時器周期,比如設置為35ms,這樣四路超聲波輪詢一次大約為140ms,足以滿足實時要求。4 機器人控制的實現圖3 為利用超聲波的反饋信息控制機器人
2021-10-08 09:41:30
如果僅使用激光雷達作為唯一的一種避障傳感器,是無法在一些復雜場所勝任避障工作的,必須要為機器人配備其它的傳感器作為補充,比如:超聲波傳感器,它的成本非常低,實施簡單,可識別透明物體,缺點是檢測距離近
2018-12-12 16:04:42
龍人六足機器人是有六條腿的仿生機器人,每條腿有兩個自由度,由兩個角度舵機控制。控制器采用Stm32機器人控制器,通過編程控制實現12個電機協調的控制行走,實現對六足昆蟲的仿生模擬。頭部有三個超聲波,實現大角度范圍的避障。重要技術點:六條腿協調前進 、后退、轉彎的算法,超聲波導航和避障
2016-03-23 17:49:48
龍人六足機器人龍人六足機器人是有六條腿的仿生機器人,每條腿有兩個自由度,由兩個角度舵機控制。控制器采用Stm32機器人控制器,通過編程控制實現12個電機協調的控制行走,實現對六足昆蟲的仿生模擬。頭部有三個超聲波,實現大角度范圍的避障。重要技術點:六條腿協調前進、后退、轉彎的算法,超聲波導航和避障
2016-03-24 16:25:46
針對智能機器人車的導航、控制問題,本文設計搭建了一套基于AT89S52 的機器人車自主導航控制系統。該系統采用聯合CCD 和超聲波測距的兩級融合方法對目標的運動姿態、狀態信
2009-08-28 10:35:53 25
25 注意:傳感器只能在水下使用,在水下才有數據 超聲波水下測距傳感器利用超聲波在水中的傳遞特性,根據時差法對不同距離下障礙物所產生的回波信號進行識別,主要適用于在水下工作設備的避障
2024-04-20 11:29:41
在商用服務機器人上,超聲波測距傳感器可以彌補視覺傳感器和激光雷達近距離的盲區避障,檢測透明玻璃、臺階等;我司商用清潔機器人系列傳感器系列響應時間短、可靠性高、易開發,適用于配送機器人、迎賓機器人
2024-04-20 16:21:05
超聲波清洗原理
超聲波在超聲波在本質上和聲波是一樣的,都是機械
2009-06-18 07:43:146424 摘要: 采用新型的超聲波傳感器,設計并開發基于ARM9 與嵌入式linux 為平臺的輪式移動機器人平臺的下的未知環境的避障導航系統。本文重點介紹該超聲波傳感器的實現原理以及在
2012-05-11 15:06:293110 
下面給大家介紹一個超聲波導航機器人,總共花費了35美刀,為了做著玩意我用了五個小時。
2016-09-19 15:16:42349 基于超聲波測距的機器人局部導航,很好的學習資料,快來下載吧。
2016-03-23 17:53:4622 自主定位導航是機器人實現智能化的前提之一,是賦予機器人感知和行動能力的關鍵因素。如果說機器人不會自主定位導航,不能對周圍環境進行分析、判斷和選擇,規劃路徑,那么,這個機器人離智能還有一大截的差距
2017-09-19 16:08:3630 提出一種采用圓形活動窗口、考慮機器人尺寸的斥力函數和自適應目標吸引力函數、強化方向控制函數的新的改進型勢能場方法,以配置超聲波測距傳感器的山彥移動機器人實現了回避障礙導航實驗。結果表明,所提出的方法
2017-11-15 16:50:395 摘要: 采用新型的超聲波傳感器,設計并開發基于ARM9 與嵌入式linux 為平臺的輪式移動機器人平臺的下的未知環境的避障導航系統。本文重點介紹該超聲波傳感器的實現原理以及在機器人平臺中的整個軟件
2018-01-17 22:39:10619 是:每個接收頭只測量一個位置,這個位置就是除盲區內因發射的超聲波旁瓣引起的接收信號超聲波包絡峰值外,第1個接收信號超聲波包絡峰值對應的距離。在機器人自主導航避障時,機器人只關心最近障礙物的距離,是能夠完成自主
2018-01-18 05:39:42744 通過觸覺或像蝙蝠那樣通過聲波感知。因此,檢測機器人前方是否存在障礙物的傳感器,可以分為接觸式和非接觸式的。?接觸式測障傳感器便是碰撞開關(圖1)。碰撞開關的工作原理非常簡單,完全依靠內部的機械結構來
2018-03-09 10:22:142058 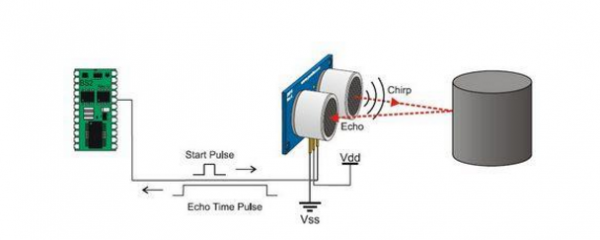
、醫療服務、家庭娛樂、軍事和航天等其他領域。機器人是工業及非產業界的重要生產和服務性設備,也是先進制造技術領域不可缺少的自動化設備。本文主要針對超聲波傳感器在機器的應用做一個簡單的介紹。?移動機器人要
2018-06-07 15:27:096710 的電子式超聲波導盲系統的基礎上,應用回聲定位原理,通過發送超聲波,然后獲得并分析障礙物的回波信息,研制了一套超聲波導盲系統。本系統采用AT89S52單片機作為控制器, 利用超聲測距的原理, 設計了一種超聲波導盲裝置,
2018-08-27 08:00:0028 ,尤其是點到點自主移動的問題,這需要更多的技術支持。下面我們通過用于機器人自動導航的超聲波傳感器這篇文章來了解機器人自動導航的相關技術支持。?眾所周知,在動物界中螞蟻和蜜蜂都是出色的導航員。撒哈拉沙漠螞蟻
2018-08-28 15:55:352064 據Science官網報道,國外研究人員研發出一款自主的機器人Robat,它可以像蝙蝠一樣利用超聲波導航。
2018-09-11 16:32:504770 以色列特拉維夫大學日前表示,受蝙蝠啟發,研究人員開發了一種完全自主的地形機器人,它能像蝙蝠一樣發出聲音并分析回聲,以識別、繪制和避開戶外障礙物。研究人員認為,聲音導航在未來機器人的應用方面擁有巨大潛力。
2018-09-14 09:25:402180 ,尤其是點到點自主移動的問題,這需要更多的技術支持。下面我們通過用于機器人自動導航的超聲波傳感器這篇文章來了解機器人自動導航的相關技術支持。 眾所周知,在動物界中螞蟻和蜜蜂都是出色的導航員。撒哈拉沙漠螞蟻可以在高
2018-09-23 07:07:003692 現在,醫生們都在使用超聲波,就像蝙蝠一樣,利用多普勒效應檢測體內血液流動的情況。但這種技術目前還不能用于檢測那些血液流通緩慢、病癥多發的小血管流動情況。不過音爆技術可以通過加熱一小滴血液,從而完成對其觀察。
2018-12-29 15:45:546753 超聲波測距精度:±(1cm+0.5%×距離),比較低一些。超聲波測距的原理是利用超聲波在空氣中的傳播速度為已知,測量聲波在發射后遇到障礙物反射回來的時間,根據發射和接收的時間差計算出發射點到障礙物的實際距離。由此可見,超聲波測距原理與雷達原理是一樣的。
2020-04-15 15:02:0336790 領域用得比較多的是紅外測距傳感器和超聲波測距傳感器兩種。下面通過本文詳細的說說用于機器人測距的超聲波傳感器。
2020-04-21 15:42:353854 現在,醫生們都在使用超聲波,就像蝙蝠一樣,利用多普勒效應檢測體內血液流動的情況。但這種技術目前還不能用于檢測那些血液流通緩慢、病癥多發的小血管流動情況。不過音爆技術可以通過加熱一小滴血液,從而完成對其觀察。
2020-07-13 16:59:282399 隨著傳感技術、智能技術和計算技術等的不斷提高,智能移動機器人一定能夠在生產和生活中扮演人的角色。那么移動機器人定位技術主要涉及到哪些呢?經總結目前移動機器人主要有這5大定位技術。 移動機器人超聲波導航
2020-10-20 14:27:341354 隨著中國科學技術發展迅猛,未來中國將成為為微型智能機器人大國。如今智能機器人需求量不斷增長,其控制系統和自動化主要的產品超聲波電機的需求也將大幅度增長,機器人手指關節用超聲波電機作為微型智能機器人的動力系統有哪些優勢?
2020-11-02 08:00:0021 隨著中國科學技術發展迅猛,未來中國將成為為微型智能機器人大國。如今智能機器人需求量不斷增長,其控制系統和自動化主要的產品超聲波電機的需求也將大幅度增長,機器人手指關節用超聲波電機作為微型智能機器人
2020-11-02 11:25:312838 電機一般安裝在機器人手指關節處,機器人的關節驅動離不開伺服系統,機器人關節越多,對柔性及精準度就越高,所需的超聲電機數量就越多。機器人對關節驅動電機的要求非常嚴格,因為超聲波電機具有以下優勢: 1、響應速度快,
2020-11-24 11:32:122989 通過接收自身發射的超聲波反射信號,根據超聲波發出及回波接收時間差及傳播速度,計算出傳播距離S,就能得到障礙物到機器人的距離,即有公式:S=Tv/2式中,T—超聲波發射和接收的時間差;v—超聲波在介質中傳播的波速。
2020-12-10 09:25:224442 超聲波技術已經進入了廣泛的應用領域,最大的領域可能是接近檢測和距離測量。其他包括儲罐,流量測量系統和成像產品中的液位檢測。大多數較新的應用都針對消費電子,汽車和工業/機器人領域。下面工采網小編和大家看看超聲波傳感器在機器人中的應用吧。
2020-12-15 14:02:002729 當其他類型的傳感器不足時,超聲波傳感器通常可以通過使用高頻聲波來檢測物體的位置和距離來操作。它們的工作方式就像蝙蝠或海豚的回聲位置,這些傳感器發出聲波(人類聽不到),然后檢測聲波在擊中物體后何時反彈。通過使用聲音,超聲波傳感器可以檢測挫敗其他類型的傳感器的對象,并在一些非常聰明的情況下工作。
2021-04-04 16:12:0012613 我們將使用超聲波傳感器和 Arduino 構建一個避障機器人。這里使用超聲波傳感器通過計算機器人與障礙物之間的距離來感知路徑中的障礙物。如果機器人發現任何障礙物,它會改變方向并繼續移動。
2022-09-08 15:14:004467 
隨之超聲波清洗技術的日趨完善,超聲波清洗市場的日趨擴大,超聲波清洗技術在民用和工業應用均占據愈來愈舉足輕重的地位。那全自動超聲波清洗機與家用對比有什么不一樣。 ? 使用所需差異 生產十種差異品牌
2022-10-19 18:30:191750 
讓超聲波儀像聽診器一樣便攜
2021-11-24 16:20:381790 
于許多領域,例如工業自動化、機器人導航、安防監控等。本文將著重介紹超聲波測距的原理,并詳細說明超聲波測距傳感器的接線方法。 一、超聲波測距原理 聲波基礎知識 在介紹超聲波測距原理之前,我們需要了解一些聲波的基礎
2024-01-22 15:22:335062
 電子發燒友App
電子發燒友App








 工商網監
工商網監
評論