 電子發燒友App
電子發燒友App



日本黑科技“飛龍”機器人,飛行過程中可自動變形穿越障礙物
- 機器人(220833)


相關推薦
熱點推薦
機器人發展凸現三大潮流
功能,有些機器人集合了多種功能,走綜合服務的道路,堪稱“多才多藝”。 比如,有的機器人能當售貨員,在顧客發出指令后,能從身后的貨架上取出所需的飲料;有的機器人能智能送餐,還可以躲避地面的障礙物,將
2016-01-28 10:43:20
機器人在傳統產業中的應用是否如魚得水?
sensor紅外扇面傳感器和基于汽車保險杠原理的防撞機械限位停止裝置。AGV一旦在一定距離范圍內感應到障礙物即減速行駛,如障礙物位于更近的范圍內則停駛,直到障礙解除,AGV再自動恢復正常行駛。智久(廈門)機器人
2015-12-10 15:32:09
機器人底盤傳感器位置坐標及底盤配置工具的使用
高度處需要在機器人外殼預留出開口,以便雷達激光掃描外部障礙物,考慮到機器人外殼的支撐,開口的值建議最少需要220°(可連續可不連續)。若由于機械結構的設計原因,開口并不連續,則可以將多個開口添加到配置
2019-01-24 14:42:36
機器人系統是什么?
機器人的移動通常是從管理機器人總體任務進度的中央處理器發出位置變化請求時開始的。導航系統通過制定行程計劃或軌跡以開始執行位置變化請求。行程計劃需考慮可用路徑、已知障礙位置、機器人能力及任何相關的任務目標。
2019-09-10 10:44:32
自動接水機器人
再接著前進。怎么樣,想不想自己做一個啊?機器人在前進過程中,通過蘋果板上的絢麗燈光提醒周圍,我來了!當然還可以通過語音播放模塊增加機器人的語音提示功能!
2016-03-25 14:28:28
越障小車電機、輪胎選擇
本帖最后由 化雨眠66 于 2013-4-3 12:48 編輯
[table=98%][tr][td]題目:越障竟速小車場地:草地、距離30m,寬度1m,直線場地障礙物:木棍、小石塊、小土塊,障礙物高度
2013-04-03 12:43:46
ANYmal機器人具有腿和腳,可跨越障礙物
ANYmal機器人的實驗版本具有腿和腳,蘇黎世聯邦理工學院步行,有腿的機器人可能擅長于越過障礙物,但車輪在光滑地面上行駛仍然更有效率。這就是蘇黎世聯邦理工學院的工程師向其現有的ANYmal四足機器人
2021-08-30 08:02:03
K-Bot版本4機器人的設計教程
。為了做到這一點,你只需要使用定制的模板,根據教師想要的教學內容?你的學生。任何想開始學習教育機器人的人都可以組裝、編程和使用它。這是一個機器人,它可以說話,探測障礙物,有一個幫助按鈕,它可以通過內置這個
2022-08-22 07:43:25
SLAM不等于機器人自主定位導航
行走的時候(比如機器人在行走的過程中遇到障礙物),局部路徑規劃將做出微調。 與全局規劃有所區別的是,局部規劃可能并不知道機器人最終要去哪,但是對于機器人怎么繞開眼前的障礙物特別在行。 這兩個層次的規劃
2018-08-24 16:56:24
SLAM技術目前主要應用在哪些領域
)作為工具,獲取地圖數據,并構建地圖,規避路程中遇到的障礙物,實現路徑規劃。跟SLAM技術在機器人領域的應用類似,只是相比較于SLAM在機器人中的應用,無人駕駛的雷達要求和成本要明顯高于機器人。 無人機
2020-12-01 14:26:37
Voxel 3D 飛行時間傳感器機器人視覺參考設計
描述此參考設計由 QVGA 分辨率 3D 飛行時間 (ToF) 傳感器 OPT8241 和 ToF 控制器 OPT9221 組成,展示了 TI 3D ToF 解決方案在掃地機器人的類似配置和環境下
2018-10-11 15:37:51
labview仿真問題,機器人路徑規劃
我現在做這個機器人的路徑規劃,有一個人工勢場的算法,已經用C實現算法,請問一下能否用這個labview仿真,就是給定一些起始點,終點,還有這個障礙物的坐標,中間是這個算法計算出來的一些點,能夠在執行算法的時候用labview描出這些點,最終形成一條規劃好的路徑。
2015-04-22 16:04:32
《變形金剛5》看不過癮?來看看現實中戰斗力爆表的機器人吧!
。在行駛過程中可以通過攝像頭、運動傳感器、器械裝置和一套復雜的計算機視覺算法觀測路況、躲開障礙物和行人、控制車速和方向。Rhex機器人是一種機動性能優異的六腿機器人,每條腿都能獨立控制,使用不同的步態在
2017-07-06 10:47:20
【AWorks280試用申請】管道機器人
:實現機器人在黑暗無人操作的情況下,自主作業,其中包括攝像頭視頻采集并保存在SD卡內,機械臂對管內障礙物采集,溫濕度測量等功能的特種機器人。方案:通過各傳感器對管道內部的情況進行采集數據,并保存到內存卡中,機械臂采樣并輔助機器人的運動,最后將管道內部的數據返回到電腦,從而便于認為對管道內部維修。
2015-10-23 10:10:03
【MiCOKit申請】基于物聯網的六足爬行機器人
數據。項目描述:六足爬行機器人相比于其他類型的機器人,在運動的穩定性、適應性、操控性上面具有較大的優勢,可以較為輕易的越過比較大的障礙物,例如階梯、鴻溝等,具有良好的越障能力,機器人本身也相對有較多
2015-08-09 17:12:20
【OK210申請】基于物聯網的六足爬行機器人
數據。項目描述:六足爬行機器人相比于其他類型的機器人,在運動的穩定性、適應性、操控性上面具有較大的優勢,可以較為輕易的越過比較大的障礙物,例如階梯、鴻溝等,具有良好的越障能力,機器人本身也相對有較多
2015-08-07 22:30:34
【TL6748 DSP申請】基于物聯網的六足爬行機器人
數據。項目描述:六足爬行機器人相比于其他類型的機器人,在運動的穩定性、適應性、操控性上面具有較大的優勢,可以較為輕易的越過比較大的障礙物,例如階梯、鴻溝等,具有良好的越障能力,機器人本身也相對有較多
2015-09-09 17:03:59
【mBot申請】全方位獲取環境數據的機器人的開發
周圍環境,然后自行識別障礙物,或循跡行走。3、還可以用2.4G無線控制機器人。4還可以添加更多的傳感器,讓機器人更加的強大
2015-11-30 15:18:20
【云智易申請】無攬越障探險機器人
申請理由:可以通過WiFi模塊進行無線遙控,開發板的紅外傳感器可以用來感知周圍環境以及障礙物,同時全套的電機模塊也足夠我們使用項目描述:鑒于天津此次爆炸中大量消防員犧牲,我們決定開發一款探險偵察排險機器人。同時我們擁有齊全的配套設施,機械軟件硬件一應俱全。目前機械設計初步完成。
2015-08-18 13:44:22
乒乓球搜集機器人
乒乓球搜集機器人能在地面上漫游,如果發現在它前面有乒乓球或者跟乒乓球大小相近的物體時,就會啟動兩個手爪將它們收進搜集筐里。乒乓球搜集機器人能自動識別前方的障礙物,從而實現機器人的智能避障.
2016-03-23 17:44:02
做卷簾門障礙物探測器,求指教!
我想做一個卷閘門下行過程中的障礙物探測器,就是在下行的過程中如果探測到門下面有障礙物的存在則停止下行,現在沒有思路。各位大俠給個思路,怎么樣來實現、需要具體哪些設備來完成這個功能。
2013-08-24 09:51:02
變結構智能服務機器人
程度,同時四足機器人由于其既有超于二足機器人的平穩性又避免了六足機器人機構的冗余和復雜性,又因為它良好的運動靈活性可以實現始終保持載物面的水平,以此使物品在運輸過程中始終處于理想的平穩狀態,極大的減少
2013-10-31 13:05:45
各種炫酷的仿生機器人
能夠自動奔跑和越過障礙物的四腳機器人。DARPA為這個機器人的研發提供了資金,目前是全世界最快的機器人,時速能超過29英里。[url=http://news.mydrivers.com/picture
2016-08-24 10:33:05
地震中哪些機器人能參與應急救援
數據反饋給救援人員,正確部署救援任務。 3、 蛇形機器人蛇形機器人是由日本東北大學等組成的團隊研發而成,可通過噴射空氣抬高配備攝像頭的前端部分,穿越較高障礙物在廢墟內部展開搜索,輕松掌握倒塌受損
2017-08-29 17:04:12
基于ARM處理器的吸塵機器人硬件設計
檢測,提高了對障礙物的準確識別,能夠實現自主避障吸塵。 0 引言 隨著人們生活水平的日益提高,我國人口的老齡化也越來越明顯,吸塵機器人作為服務機器人的一種,能夠代替人進行清掃房間、車間、墻壁等一些
2018-11-06 16:01:27
基于Liniux的搜救飛行機器人的設計
法寶,尤其是飛行機器人技術。因具有靈活、重量輕、以及可深入危險區域工作等優勢,搜索飛行器在災后救援工作中起著越來越重要的作用,此類飛行器需要具備穩定的運動控制、采集多種環境信息、以及無線控制等功能
2016-01-07 16:34:53
基于labview機器視覺的障礙物時別
通過攝像頭對周圍環境信息的實時采集,如果當鏡頭前方出現障礙物時候,以一定的方式(聲音或振動之類的)反饋出來。主要考慮的是實現盲人室內導盲作用,不需要太過于考慮實際使用,只要能實現判定到障礙物,自動提醒就行啦。怎么判定前方出現障礙物,一直困擾著我。求大神指個思路,能有程序框圖就更好了
2017-03-14 07:58:55
如何實現擁有強悍功能智能巡檢機器人
功能機器人在監測的過程中通過加入NPU機器視覺,對攝像頭采集數據進行識別并區分是否存在軌道障礙物和管道障礙物,即時停止并上傳報警信息;(5) 自動生成巡檢監測報告將此次巡檢采集信息整理,經過CPU簡化
2023-04-12 15:49:23
如何實現移動機器人的設計?
移動機器人利用導航技術,獲得機器人的目前所處的位置,結合傳感器技術對周圍外界環境(障礙物等)作實時探測,并根據環境提供的信息規劃一條可行路徑完成達到目標點的任務。移動機器人技術涉及到傳感器技術
2020-11-23 15:08:52
嵌入式機器人控制系統設計的組織架構是怎么樣的?
移動機器人是一種能夠感知外部環境,在有障礙物的環境中能夠實現動態決策與規劃,從而完成避障等多種功能的綜合系統。機器人系統通常分為機構本體和控制系統兩部分,控制系統的作用是根據用戶的指令對機構本體進行
2020-03-06 07:07:07
怎樣設計一個能避開各種障礙物的巡線機器人嗎
我正在設計一個也能避開各種障礙物(兩個數字紅外 (IR) 傳感器)的巡線機器人,但由于我是電子學初學者,所以我對我的原理圖有點困惑,這就是為什么我想知道是否我的原理圖是正確的,如果它能工作的話
2022-12-07 07:49:08
敢對你Say NO的機器人,怕嗎?
人類命令,比如:機器人前行遇到障礙物或對自己不安全等因素,有趣的是當Gordon Briggs告訴機器人前方僅僅是個小障礙后,機器人又毫不猶豫的執行了命令。 這個實驗也反映出了機器人的另一面,就是它們
2015-12-09 09:16:31
智能掃地機器人用什么馬達
使用過程中如果操作不慎,也會引發火災。在此,提醒大家在使用掃地機器人過程中要注意防火。主要要注意以下幾點:一、不要潮在濕的環境使用,以免電機受潮發生短路起火。如果不是干濕兩用的掃地機器人千萬不要吸水。二
2018-10-12 10:11:44
智能救援機器人的功能和作用
機器人,人體的上部安裝在一個靈活的混合移動基座上。救援機器人有四條腿,并立即有一個導向輪驅動器。這樣可以讓它在崎嶇的地形中向多個方向移動,也可以調整上半身的高寬比。為了擺脫較高的障礙物或爬室內樓梯,可以把
2020-11-30 15:10:15
智能監控機器人該怎么設計?
溫濕度和環境監測、無線通信、躲避障礙物以及無線遙控等功能。此智能監控機器小車與目 前已有的同類設計相比,有性價比高、操作方便、可靠性好、功耗小等優點。
2019-10-14 07:37:52
智能避障語音遙控機器人
、下一首、暫停/播放、音量加、音量減等。我們的機器人還具有自躲避障礙物的功能,當機器人離障礙物比較近的時候,自行避開。由于我們設計的機器人的外觀是類似人型的,看起來會比較酷,我相信它一定會很受歡迎的。
2013-10-26 22:50:23
服務型智能掃地機器人的主要功能有哪些呢
服務型智能掃地機器人因其低廉的價格和高效的工作能力,越來越受到消費者的認可,目前己逐漸進入家庭生活代替人們的清潔工作,具有廣闊的市場。服務型智能掃地機器人需要具有自主運動規劃和導航功能,在其工作過程中
2021-11-08 09:26:58
汽車機器人自動導航方案
裝配在汽車上后,能結合本車的速度自動判斷車前方的障礙物,當車輛前方出現障礙物對本車構成威脅時,他能自動報警,提醒駕駛人員注意,駕駛員就能及時采取相應的措施。 駕駛員未聽到報警或聽到報警未采取措施或
2012-04-25 16:39:57
測量機器人在變形監測中的應用
、系統組成該方式是基于一臺測量機器人的有合作目標(照準棱鏡)的變形監測系統,可實現全天候的無人值守監測,其實質為自動極坐標測量系統,其結構與組成方式。如圖:?圖1:測量機器人變形監測系統組成(1)基站
2018-03-30 14:45:32
深度解析|機器人自主移動的秘密(三)
,預先規劃好的,一旦機器人前往目的地的過程中遇到了新的障礙物,就只好完全停下來,等待障礙物離開或者重新規劃路徑了。如果掃地機器人買回家,必須先把屋子都走一遍以后才肯掃地,那用戶體驗就會很差。為此,也
2017-08-01 13:50:56
焊縫跟蹤:自動化機器人實時焊縫跟蹤尋位
焊縫跟蹤:自動化機器人實時焊縫跟蹤尋位自動化機器人焊接過程中會出現工件夾偏、鈑金件熱變形、機器人焊接后再進行人工補焊等情況頻繁發生,非但沒有節省人工成本而且增長了產品返修率。自動化機器人專用激光焊縫
2019-04-19 10:48:41
用于機器人避障的激光雷達避障傳感器安裝方式詳解
地面42cm高度處,安裝2臺TFmini-S分別向左下方、右下方探測,機器人直立狀態下雷達出光方向與水平地面夾角為15°,機器人在前傾、后仰過程中與地面夾角變化為10~57°,雷達實時探測機器人斜下方
2020-05-12 14:11:35
蛇形救災機器人:外觀很特別
近日,在日本東北大學等組成的團隊開發出一款蛇形機器人,可以穿越災區中比較高的障礙物在廢墟內部展開搜索。想必大家都想知道這款蛇形機器人是怎么樣的,那么到底怎么樣的呢?讓我們一起來看看詳細介紹。 日本
2017-06-20 11:35:30
解讀機器人的幾大避障技術
隨著機器人在工廠、倉庫、酒店、商場、餐廳等環境中的使用,人們對機器人的移動能力越為重視,以至于避障成為一個極為關鍵且必要的功能。人們希望機器人能根據采集的障礙物的狀態信息,在行走過程中通過傳感器感知
2018-12-12 16:04:42
讓機器人在陌生環境里穿梭自如的激光雷達
`這輛汽車對于科技愛好者絕不陌生,這就是谷歌研發的無人駕駛汽車。在行駛過程中,無人車需要感知周圍環境,但無法像人一樣用眼睛完成,這一切就要依靠車頂安裝的激光雷達。該裝置可檢測周圍障礙物,并及時反饋
2018-09-10 16:32:46
詳細介紹機場智能指路機器人的工作原理
路徑。路徑規劃算法會考慮多種因素,如距離最短、避開人流密集區域、優先選擇寬闊通道等,以確保旅客能夠快速、順暢地到達目的地。
實時導航與避障 :在機器人引導旅客的過程中,導航系統會實時監控機器人的運動狀態
2025-05-10 18:26:31
贏得百萬設計大獎的Gimball無人機器人
救災機器人清理現場、協助進入救援,然而當時卻沒有任何一架無人機能夠進入現場偵測,這是因為現場障礙物太多,超出一般無人機的飛行與應變能力之故。也因此,救難人員必須冒著高度生命危險親自進入災區,才能夠得到
2015-03-04 10:47:32
走到哪都不會迷路,全自動機器人是怎么導航的?
,到2。參照物導航 這里假設運動距離和轉向角度測量都是精準的,但其實是不可能的。 那么,問題又來了,如果機器人遇到障礙物,或者被人為挪動了,起點就會錯亂。我們把“遇障礙”叫動態路徑規劃,“被挪動”叫
2018-05-11 11:51:27
超聲波傳感器在機器人中的應用
做到實時控制,并且在測量精度方面能達到工業實用的要求,因此在移動機器人的研制上也得到了廣泛的應用。為了使移動機器人能自動避障行走,就必須裝備測距系統,以使其及時獲取距障礙物的距離信息(距離和方向
2018-08-09 15:19:59
超聲波避障技術助力智能掃地機器人的市場
基于超聲波避障技術是建立在獲取機器人前方障礙物的距離和位置信息上,故超聲波避障技術主要運用超聲波傳感器,根據超聲波測距原理,結合矩陣式結構設計理念的數據融合對機器人前方障礙物的距離和位置進行定位。
2020-05-11 07:23:15
避障機器人電路設計方案(原理圖+PCB+源碼)
模式:它可以使用HC-SR04傳感器感應是否存在要跟隨的物體;跟蹤模式:追隨者機器人是跟隨黑線或白線的車輛;避開模式:避障機器人是一種智能設備,可以自動感知前方的障礙物,并通過將自己轉向另一個方向來避開障礙物。
2020-09-27 15:09:45
避障機器人電路設計解決方案
模式:它可以使用HC-SR04傳感器感應是否存在要跟隨的物體;跟蹤模式:追隨者機器人是跟隨黑線或白線的車輛;避開模式:避障機器人是一種智能設備,可以自動感知前方的障礙物,并通過將自己轉向另一個方向來避開障礙物。`
2020-10-28 18:09:41
除了機器人行業,激光雷達還能應用于哪些領域?
主要以多線數為主,作用與機器人領域相當,主要是幫助汽車自主感知道路環境,自動規劃行車路線,并控制車輛到達預定的目標。激光雷達是怎么幫汽車識別路口與方向呢?激光雷達使用的技術是飛行時間,就是根據激光遇到
2018-12-10 14:55:39
基于雙目視覺的移動機器人障礙物檢測研究
一種基于圖像分割和立體視覺相結合的障礙物檢測方法。通過分割提取出了障礙物的大致形體并濾去地面上的冗余信息,這樣就把立體視覺避障中匹配區域縮小到有用的障礙物區
2010-10-18 16:08:08 28
28
28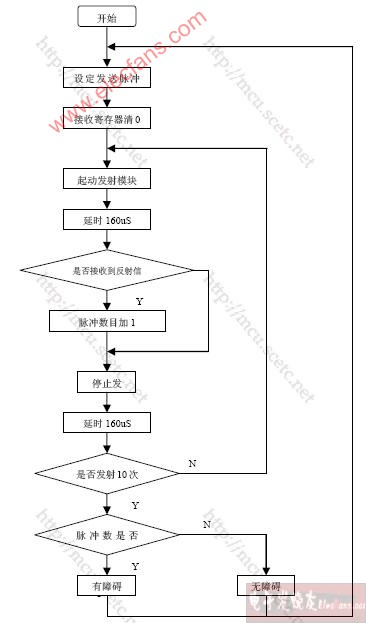
自動充電機器人
實現應用. 工作流程為:1) 收到充電指令后, 天軌搭載機器人移動到對應的充電樁, 移動過程中3D智能相機偵測移動前方是否有障礙物, 3D相機偵測充電槍
2025-07-07 08:47:04
FIGLA超聲波感應全自動清掃機器人
日本FIGLA公司發布了一款全自動清掃機器人,名字叫做“FIGLA·愛”,這款機器人最大的特點在于能夠自動判別室內環境進行全自動清掃任務,機器人內部裝置了障礙物感應器,可以根據
2011-09-23 11:35:13 1091
1091
1091基于仿生原理的架空輸電線路巡線機器人越障模型
針對目前架空輸電線路巡線機器人連續巡線能力低、對大型障礙物越障適應能力弱的問題,提出基于仿生學原理的巡線機器人越障模型。設計兩吊臂式巡線機器人,建立機器人的動力學
2013-06-08 17:52:5849
49傳感器在機器人控制中的信息融合技術
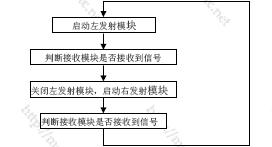
本論文主要介紹是以單片機ATmega16為智能控制系統核心,在移動的機器人系統中應用光感傳感器實現機器人對障礙物的一系列行為;通過紅外傳感器實現機器人在移動過程中對黑色膠條的尋線,轉彎的過程。
2016-09-26 14:42:421409
1409
基于動態自適應原理參照昆蟲結構設計的飛行機器人的優劣
的生理結構,為這些飛行機器人設計了用于穿越障礙物的外殼。隨著 Chen Li 畢業,這種設計方式開始被帶到了更多地方,比如他畢業后所去的約翰霍普金斯大學。在那里,他擁有自己的實驗室 Terradynamics。 在2016年的 IROS 上,Chen Li 發表了自己的一篇論文,闡述要如何使用新的方法設計
2017-09-20 13:35:370
0單片機控制的機器人避障系統
隨著經濟及科技的快速發展,智能機器人的應用也越來越廣泛。智能機器人能夠通過傳感器來感知外界,并達到避障功能。如何讓機器人在行進過程中識別障礙物并精準避障是一個非常重要的課題。本文通過采用紅外傳感器來
2018-01-30 14:16:302
2日本研究飛行機器人 可以改變任何形狀
日本東京大學的研究人員開發了一種稱為DRAGON(龍)的飛行機器人,旨在用于室內。DRAGON也意味著“具有多自由度空中變形能力的雙旋翼嵌入式多連接機器人”。
2018-06-25 11:38:343693
3693獵豹機器人配備新的算法_沒有攝像頭也可以躲避障礙物?
麻省理工學院最新發布的新研究視頻顯示,該學院研制的Cheetah 3獵豹機器人不需要直視而爬上樓梯臺階。視頻顯示,這個90磅重的機器人配備了新的算法,即使沒有攝像頭的幫助也可以躲避障礙物,機器人通過觸感來適應整個環境并完成任務。
2018-07-08 10:07:543586
3586日本研發出DRAGON飛行機器人,在飛行中也能變換形狀
據報道,日本東京大學的研究人員開發了一種稱為DRAGON(龍)的飛行機器人,旨在用于室內。DRAGON也意味著“具有多自由度空中變形能力的雙旋翼嵌入式多連接機器人”。DRAGON由涵道風扇提供動力,可以在飛行中變換成不同的形狀。
2018-10-29 09:39:532340
2340世界上首個能夠在飛行過程中變形的飛行機器人問世 可實現自我調整
一直以來我們看到的飛行機器人在空中都是只能保持固定的形態,無法做到像鳥兒一樣自由伸展。但近期,法國艾克斯馬賽大學運動科學院的研究人員打造出了世界上首個能夠在飛行過程中變形的飛行機器人,完全就像鳥類一樣。
2018-12-28 10:51:193340
3340Amoeba Energy推出履帶式機器人 能輕松爬上樓梯或越過其他障礙物
雖然我們已經看到很多設計用于向人們家中運送包裹的機器人,但大多數機器人都被房屋的前臺阻擋。 總部位于東京的Amoeba Energy正在開發一種履帶式機器人來提供解決方案。該機器人使用軟質泡沫輕松爬上樓梯或越過其他障礙物。
2019-05-29 16:11:173491
3491如何實現移動機器人的智能避障算法詳細仿真及資料研究分析
針對輪式移動機器人運動過程中避免碰撞固定障礙物的問題, 提出了一種基于預先檢測位置的智能控制算法。該算法以障礙物邊預先檢測位置為運行過程的子目標, 通過經由各子目標, 實現移動機器人繞行障礙物
2019-10-29 17:04:2610
10彈性四足機器人Minitaur可以穿過各種障礙 其最大速度為每秒2米
Minitaur被設計為一種價格合理且實用的。它不僅可以越過帶輪和履帶機器人無法通行的障礙物穿越的地形,還可以爬樓梯和鏈環圍欄。甚至可以爬樹。
2019-12-05 15:19:344306
4306機器人路徑規劃算法,全局路徑規劃與局部路徑規劃究竟有哪些區別
路徑規劃是移動機器人導航最基本的環節,指的是機器人在有障礙物的工作環境中,如何找到一條從起點到終點適當的運動路徑,使機器人在運動過程中能安全、無碰撞地繞過所有障礙物。
2020-12-26 10:49:256216
6216四足機器人智能感知系統研究工作取得突破性進展
該系統研制團隊負責人郭睿介紹,爬樓梯、跨越障礙物這類行為是傳統輪式機器人很難做到的,而四足機器人可輕松應付復雜地形,在探險救援、反恐防爆等場景中具有很大應用潛力。
2021-01-28 14:26:532808
2808基于用于檢測障礙物的傳感器的3D打印清潔機器人
基于fpga的3D打印清潔機器人。該機器人具有多個用于檢測障礙物的傳感器和一個用于清潔地板的吸塵器。此外,該機器人還包含一種導航算法,使其能夠盡可能高效地駛離房間并相應地對障礙物做出反應。
2021-04-28 15:09:292739
2739
使用超聲波傳感器和Arduino構建一個避障機器人
我們將使用超聲波傳感器和 Arduino 構建一個避障機器人。這里使用超聲波傳感器通過計算機器人與障礙物之間的距離來感知路徑中的障礙物。如果機器人發現任何障礙物,它會改變方向并繼續移動。
2022-09-08 15:14:004467
4467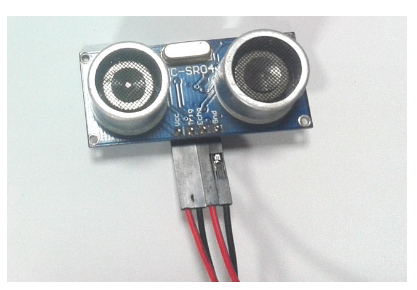
基于Arduino UNO的避障機器人
本方案是一個基于 Arduino UNO 的避障機器人。障礙物檢測和避免可以被認為是設計移動機器人的核心問題。避障機器人是一種智能機器人,可以自動感知并克服其路徑上的障礙物。它包含一個
2022-12-22 14:49:253
3超聲波傳感器在自動清潔機器人的應用
在辦公樓和購物中心,自動駕駛清潔機器人越來越多地被投入使用。這些機器人根據預設的網格模式,在需要清潔的樓層區域進行操作,以確保它們能夠可靠地完成自動檢測并規避障礙物。然而,在實際運行過程中,清潔
2023-06-30 14:07:461419
1419NVIDIA 自動駕駛實驗室:基于早期網格融合的近距離障礙物感知
時必須克服一些獨特的挑戰。目標車輛包含感知車輛周圍環境的傳感器。在泊車過程中,目標車輛必須靠近動態障礙物,如行人和其他車輛,以及靜態障礙物,如柱子和電線桿等。為了適應泊車位,還可能需要穿過較低的障礙物,如車輪護欄和路緣石。 觀看? NVIDIA DRIVE Lab
2023-07-13 21:15:011508
1508
自動駕駛汽車如何識別障礙物
自動駕駛汽車識別障礙物是一個復雜而關鍵的過程,它依賴于多種傳感器和技術的協同工作。這些傳感器主要包括激光雷達(LiDAR)、雷達、攝像頭以及超聲波雷達等,它們各自具有不同的工作原理和優勢,共同為自動駕駛汽車提供全面的環境感知能力。以下是對自動駕駛汽車如何識別障礙物的詳細闡述。
2024-07-23 16:40:243754
3754AGV轉運機器人需求快速增長,如何進行障礙物檢測確保安全?
富唯智能移動機器人通過激光雷達導航算法,實現自動路徑規劃,無需軌道、磁條等。當路徑中有障礙物時,會重新規劃路徑避開障礙物。
2024-11-16 15:54:41955
955
當復合機器人碰到障礙物,會觸發怎樣的智能繞障機制?
決策,實現了在動態環境中的高效,安全運行。那么,當這樣一臺復合機器人碰到障礙物時,它是如何實現自主繞障的?
2025-09-16 17:02:05700
700
- 設計技術
- 可編程邏輯
- 電源/新能源
- MEMS/傳感技術
- 測量儀表
- 嵌入式技術
- 制造/封裝
- 模擬技術
- RF/無線
- 接口/總線/驅動
- 處理器/DSP
- EDA/IC設計
- 存儲技術
- 光電顯示
- EMC/EMI設計
- 連接器
- 行業應用
- LEDs
- 汽車電子
- 音視頻及家電
- 通信網絡
- 醫療電子
- 人工智能
- 虛擬現實
- 可穿戴設備
- 機器人
- 安全設備/系統
- 軍用/航空電子
- 移動通信
- 工業控制
- 便攜設備
- 觸控感測
- 物聯網
- 智能電網
- 區塊鏈
- 新科技
- 聯系我們
- 廣告合作
- 王婉珠:wangwanzhu@elecfans.com
- 內容合作
- 張迎輝:mikezhang@elecfans.com
-
關注我們的微信

-
下載發燒友APP

-
電子發燒友觀察

版權所有 ? 湖南華秋數字科技有限公司
長沙市望城經濟技術開發區航空路6號手機智能終端產業園2號廠房3層(0731-88081133)
電子發燒友 (電路圖) 湘公網安備43011202000918 工商網監
湘ICP備2023018690號-1
工商網監
湘ICP備2023018690號-1
評論