3D激光雷達(dá)SLAM算法綜述
一方面獲取傳感器采集的各幀數(shù)據(jù)對應(yīng)的局部坐標(biāo)系的位置和姿態(tài)是構(gòu)建地圖的關(guān)鍵, 即建圖包含了定位問題;....


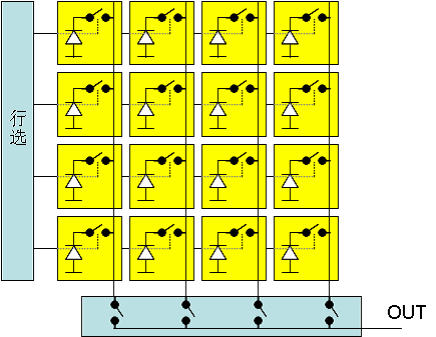
全球最大的圖像傳感器問世:82.4平方厘米、3.16億像素
為了捕捉這個 160,000 平方英尺、16K x 16K 顯示屏的內(nèi)容,Big Sky 攝像頭系統(tǒng)....
基于圖像處理技術(shù)的螺紋幾何參數(shù)測量系統(tǒng)設(shè)計(jì)
摘要:針對螺紋幾何參數(shù)測量過程中,傳統(tǒng)人工測量效率低、儀器昂貴、耗時費(fèi)力、偶伴有人為誤差等不足。本研....


針對無人機(jī)成像應(yīng)用的鏡頭設(shè)計(jì)
無人機(jī)成像的另一個重要應(yīng)用是:植被的多光譜和高光譜成像。多光譜成像是在多個單獨(dú)的波長區(qū)域收集數(shù)據(jù),而....



利用手持?jǐn)z像機(jī)圖像通過卷積神經(jīng)網(wǎng)絡(luò)實(shí)時進(jìn)行水稻檢測
在本研究中,研究者提出了一種有效的深度卷積神經(jīng)網(wǎng)絡(luò)(DCNN)結(jié)構(gòu),利用手持照相機(jī)拍攝的照片來檢測水....


編程語言那么多,最適合圖像識別的是哪種呢?
這段時間垃圾分類相關(guān)小程序、APP的上線,讓圖像識別又一次進(jìn)入人們的視線,我國圖像識別技術(shù)在全世界都....
知識圖譜基礎(chǔ)知識應(yīng)用和學(xué)術(shù)前沿趨勢
知識圖譜(Knowledge Graph)以結(jié)構(gòu)化的形式描述客觀世界中概念、實(shí)體及其關(guān)系。是融合了認(rèn)....


圖像處理怎么入門?
總之圖像處理的基本思想還是要立足于圖像本身,要深度到圖像內(nèi)部結(jié)構(gòu)中,思維要靈活。我當(dāng)時做本科畢設(shè)時,....
如何使用TensorFlow構(gòu)建機(jī)器學(xué)習(xí)模型
在這篇文章中,我將逐步講解如何使用 TensorFlow 創(chuàng)建一個簡單的機(jī)器學(xué)習(xí)模型。
坐標(biāo)系在動態(tài)SLAM中究竟有多重要?
大多同時定位于建圖(SLAM)系統(tǒng)在傳統(tǒng)上假定的都是靜態(tài)世界,這與現(xiàn)實(shí)世界的場景不符。

什么是LlamaIndex?LlamaIndex數(shù)據(jù)框架的特點(diǎn)和功能
LlamaIndex是一個數(shù)據(jù)框架,用于讓基于LLM的應(yīng)用程序攝取、結(jié)構(gòu)化和訪問私有或領(lǐng)域特定的數(shù)據(jù)....

加速Python for循環(huán)的12種方法
Python內(nèi)建的一個常用功能是timeit模塊。下面幾節(jié)中我們將使用它來度量循環(huán)的當(dāng)前性能和改進(jìn)后....
工業(yè)機(jī)器視覺/3D視覺行業(yè)分析和企業(yè)匯總
根據(jù)調(diào)查結(jié)果顯示,2012-2021年中國機(jī)器視覺器件和系統(tǒng)的銷售額從2012年的19.8億元增長至....

深入探索AOI算法的設(shè)計(jì)考慮因素
假如有一個D結(jié)點(diǎn)原來的坐標(biāo)是(78, 69),現(xiàn)在它移動到(82, 75),坐標(biāo)變動后,D結(jié)點(diǎn)需要從....
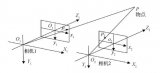
三維視覺測量技術(shù):被動視覺測量和主動視覺測量
與人眼的立體感知類似,雙目立體視覺用兩個相機(jī)從不同的角度對被測物體成像。依據(jù)兩幅圖像中對應(yīng)點(diǎn)的立體視....
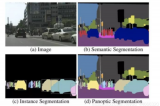
兩種應(yīng)用于3D對象檢測的點(diǎn)云深度學(xué)習(xí)方法
隨著激光雷達(dá)傳感器(“光檢測和測距”的縮寫,有時稱為“激光掃描”,現(xiàn)在在一些最新的 iPhone 上....

目前主流的深度學(xué)習(xí)算法模型和應(yīng)用案例
深度學(xué)習(xí)在科學(xué)計(jì)算中獲得了廣泛的普及,其算法被廣泛用于解決復(fù)雜問題的行業(yè)。所有深度學(xué)習(xí)算法都使用不同....
python常用機(jī)器學(xué)習(xí)及深度學(xué)習(xí)庫介紹
目前,隨著人工智能的大熱,吸引了諸多行業(yè)對于人工智能的關(guān)注,同時也迎來了一波又一波的人工智能學(xué)習(xí)的熱....

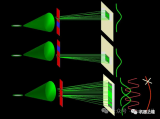
基于激光照明的短波紅外成像系統(tǒng)設(shè)計(jì)
近日據(jù)麥姆斯咨詢介紹,從醫(yī)療診斷到自動駕駛汽車和機(jī)器人,光子學(xué)正在改變我們感知世界以及與世界互動的方....
移動機(jī)器人的運(yùn)行架構(gòu)
ROS的核心概念不少,有節(jié)點(diǎn)、話題、消息、服務(wù)等,在實(shí)際機(jī)器人運(yùn)行過程中,這些概念是如何體現(xiàn)的呢?




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)