基于Python和深度學(xué)習(xí)的CNN原理詳解
卷積神經(jīng)網(wǎng)絡(luò) (CNN) 由各種類型的層組成,這些層協(xié)同工作以從輸入數(shù)據(jù)中學(xué)習(xí)分層表示。每個層在整體....

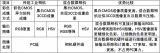
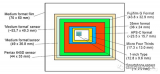
混合數(shù)據(jù)相機(jī)實(shí)現(xiàn)高精度彩色成像技術(shù)
采用傳統(tǒng)工業(yè)相機(jī)作為圖像采集模組的檢測系統(tǒng),硬件構(gòu)成較為復(fù)雜,同時需要基于經(jīng)驗(yàn)不斷嘗試光源方案和硬件....
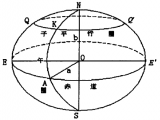
深入解析坐標(biāo)轉(zhuǎn)換應(yīng)用實(shí)踐
測量坐標(biāo)轉(zhuǎn)換一般包括兩方面的內(nèi)容:坐標(biāo)系轉(zhuǎn)換和坐標(biāo)基準(zhǔn)轉(zhuǎn)換。同一坐標(biāo)基準(zhǔn)下,空間點(diǎn)不同表現(xiàn)形式的轉(zhuǎn)換....
縱觀全局:YOLO助力實(shí)時物體檢測原理及代碼
YOLO 流程的最后一步是將邊界框預(yù)測與類別概率相結(jié)合,以提供完整的檢測輸出。每個邊界框的置信度分?jǐn)?shù)....
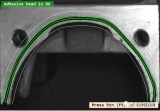
一文學(xué)會,膠位偏移、缺膠、斷膠、溢膠檢測(含源碼)
注意,這里halcon的官方例程是給了一個軌跡的點(diǎn)集,我們在實(shí)際的檢測中,可以使用CAD圖紙導(dǎo)入或者....

基于視覺的動態(tài)手勢識別的ResNeXt網(wǎng)絡(luò)詳解
VGG是基于AlexNet進(jìn)行改進(jìn)得到的網(wǎng)絡(luò)模型結(jié)構(gòu)。AlexNet使用如11*11、7*7、5*5....

GPU CUDA 編程的基本原理是什么
神經(jīng)網(wǎng)絡(luò)能加速的有很多,當(dāng)然使用硬件加速是最可觀的了,而目前除了專用的NPU(神經(jīng)網(wǎng)絡(luò)加速單元),就....

淺談透視變換的硬件實(shí)現(xiàn)策略
需要著重說明地是,(u,v)是透視變換后圖像的坐標(biāo),(x,y)是源圖像坐標(biāo)。我們進(jìn)行實(shí)際的透視變換實(shí)....

Metalenz與三星合作將其新型生物識別傳感器應(yīng)用于智能手機(jī)
本周,在西班牙巴塞羅那舉行的移動世界大會(Mobile World Congress)上,Metal....




ROS2 HSV值獲取
飽和度表示顏色的純度或強(qiáng)度,即顏色的深淺程度。飽和度為0時,顏色變?yōu)榛译A;飽和度為最大值時,顏色呈現(xiàn)....

數(shù)據(jù)預(yù)處理和特征工程的常用功能
機(jī)器學(xué)習(xí)最基礎(chǔ)的5個流程,分別是數(shù)據(jù)獲取,數(shù)據(jù)預(yù)處理,特征工程,建模、測試和預(yù)測,上線與部署。

Transformers.js 2.13、2.14 發(fā)布,新增8個新的架構(gòu)
請參閱此處了解可用模型的列表。首先,我們在 Hugging Face Hub 上轉(zhuǎn)換了約 1140 ....

字節(jié)發(fā)布機(jī)器人領(lǐng)域首個開源視覺-語言操作大模型,激發(fā)開源VLMs更大潛能
對此,ByteDance Research 基于開源的多模態(tài)語言視覺大模型 OpenFlamingo....

請問如何在OriginBot上實(shí)現(xiàn)人臉識別呢?
大家在生活中經(jīng)常會看到在我們進(jìn)入商城時,門口會有相機(jī)在拍攝我們,并且會統(tǒng)計(jì)有多少人數(shù)進(jìn)入商店,它是如....
OpenCV兩種不同方法實(shí)現(xiàn)粘連大米分割計(jì)數(shù)
測試圖如下,圖中有個別米粒相互粘連,本文主要演示如何使用OpenCV用兩種不同方法將其分割并計(jì)數(shù)。

ROS2 robot-localization配置方案
robot_localization是一個ROS的包,基于卡爾曼濾波,對多種傳感器進(jìn)行數(shù)據(jù)融合,進(jìn)而....
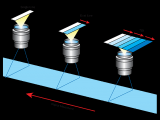
為什么使用圖像緩沖技術(shù)?圖像緩沖技術(shù)的工業(yè)應(yīng)用
緩沖技術(shù)是為了協(xié)調(diào)吞吐速度相差很大的設(shè)備之間數(shù)據(jù)傳送而采用的技術(shù)。

實(shí)現(xiàn)圖像識別神經(jīng)網(wǎng)絡(luò)的步驟
我們的下一個任務(wù)是使用先前標(biāo)記的圖像來訓(xùn)練神經(jīng)網(wǎng)絡(luò),以對新的測試圖像進(jìn)行分類。因此,我們將使用nn模....
機(jī)器人運(yùn)動學(xué)中的非完整約束與運(yùn)動模型推導(dǎo)
機(jī)器人運(yùn)動學(xué)中的運(yùn)動學(xué)約束是指機(jī)器人在運(yùn)動過程中受到的限制,包括位置、姿態(tài)、速度和加速度等因素。這些....

計(jì)算攝影學(xué)基石:相機(jī)成像原理
因而,計(jì)算攝影學(xué)涉及到多個學(xué)科的交叉,理解它的基礎(chǔ)原理往往需要具備廣泛的知識背景和專業(yè)技能。同時,相....

計(jì)算機(jī)視覺與圖像處理、模式識別、機(jī)器學(xué)習(xí)學(xué)科之間的關(guān)系
計(jì)算機(jī)視覺(computer vision):用計(jì)算機(jī)來模擬人的視覺機(jī)理獲取和處理信息的能力。就是指....



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)