") 彌合人工視覺和觸覺之間的差距
彌合人工視覺和觸覺之間的差距

使用創(chuàng)新手套的物體操縱從而獲得詳細(xì)壓力圖的大型數(shù)據(jù)庫。這些數(shù)據(jù)可能會導(dǎo)致機(jī)器人感應(yīng)的進(jìn)步以及我們對觸摸在操縱中的作用的理解。
人類感知能力的研究和復(fù)制,例如視覺,聽覺和觸覺(基于觸摸)的感知,取決于合適數(shù)據(jù)的可用性。通常,數(shù)據(jù)集越大越豐富,模型越能模仿這些功能。人工視覺和語音系統(tǒng)的進(jìn)步依賴于強(qiáng)大的模型,稱為深度學(xué)習(xí)模型,并且由無處不在的數(shù)字圖像和語音音頻數(shù)據(jù)庫推動。相比之下,觸覺傳感器的發(fā)展(將物理接觸刺激轉(zhuǎn)換為可測量信號的設(shè)備)的進(jìn)展受到限制,這主要是因為難以將電子設(shè)備集成到柔性材料中。在Nature的一篇論文中,Sundaram 等報告了他們使用低成本觸覺手套來解決這個問題。
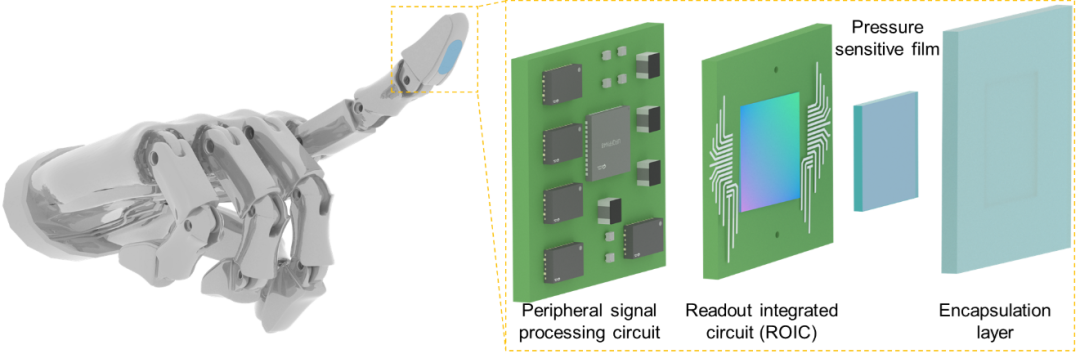
作者的手套由一個手形傳感套管組成,該傳感套管連接在針織手套的手掌側(cè)(圖1)。套筒包含力敏膜,在該膜上縫制64個導(dǎo)電線網(wǎng)絡(luò):沿手套的一個方向32個,沿垂直方向32個。這些螺紋重疊的548個點(diǎn)中的每一個是壓力傳感器,因為當(dāng)按壓這些點(diǎn)時,交錯膜的電阻減小。手套的輸出可以作為32×32灰度像素陣列處理,其中每個像素的顏色表示從低(黑色)到高(白色)的施加壓力。這些壓力圖以每秒約七幀的速度記錄。
圖片來源:Subramanian Sundaram
圖1 |一種低成本的人造手套。Sundaram 等人描述了一種手套,其由附接到針織手套(黃色)的手形感測套筒(黑色)組成。套筒包含力敏膜,在該膜上縫制導(dǎo)電線(銀)網(wǎng)絡(luò)。這些螺紋重疊的點(diǎn)形成壓力傳感器。作者表明,在對象操作期間由這些傳感器收集的壓力圖使機(jī)器學(xué)習(xí)模型能夠?qū)W習(xí)識別單個對象,估算對象的權(quán)重并區(qū)分不同的手部姿勢。
在Sundaram及其同事的研究中,手套被用來記錄幾個壓力圖的視頻,這些視頻是在3-5個單獨(dú)操作26個日常物品的過程中進(jìn)行的。這個程序產(chǎn)生了一個詳細(xì)的壓力圖數(shù)據(jù)庫,據(jù)我所知,這是最大的數(shù)據(jù)集之一。作者發(fā)現(xiàn),盡管制造成本僅為10美元左右,但手套具有柔韌性,堅固性和對小壓力變化的敏感性。
為了證明手套捕獲手與每個物體的不同相互作用,Sundaram 等人。使用記錄的數(shù)據(jù)進(jìn)行自動對象識別。他們展示了最初設(shè)計用于大規(guī)模圖像分類的最先進(jìn)的深度學(xué)習(xí)模型如何從聚集的壓力圖中學(xué)習(xí),以便在盲目操作期間重新識別26個物體。大量的地圖及其空間分辨率對于成功識別物體至關(guān)重要。
接下來,作者使用手套拾取物體,并表明類似的深度學(xué)習(xí)模型可以估計未知物體的重量。在不同的手部姿勢下也佩戴手套,并且傳感器讀取的信號足夠詳細(xì)以區(qū)分每個姿勢。最后,Sundaram及其同事通過觀察信號相關(guān)性分析了在物體抓取過程中不同手套區(qū)域之間的協(xié)作。
除了提供人類掌握的充分研究原理的實驗證據(jù)之外,這種數(shù)據(jù)驅(qū)動的探索可以提高我們對物體操縱過程中觸摸功能的理解。深度學(xué)習(xí)模型極大地提高了我們對視覺對象識別的神經(jīng)機(jī)制的認(rèn)識。在這方面,類似的方法可以應(yīng)用于解釋大腦中的觸覺信息處理。
Sundaram及其同事在物體操縱過程中同時產(chǎn)生壓力圖和相應(yīng)的手部照片,產(chǎn)生大量同步的視覺和觸覺信息。多種形式的感官知覺的數(shù)據(jù)集是不常見的,并且代表了多感覺整合系統(tǒng)發(fā)展的基本步驟,以及對大腦如何形成對環(huán)境的連貫感知的理解。
這種柔性傳感裝置可具有各種應(yīng)用。例如,在醫(yī)療診斷,個人健康護(hù)理和運(yùn)動中。但它也可能影響主動(外部動力)假肢和機(jī)器人手的發(fā)展。觸覺反饋在控制手部運(yùn)動至關(guān)重要的作用和施加的力,使得缺乏這些信息使得它具有挑戰(zhàn)性的人類和機(jī)器人實現(xiàn)穩(wěn)定的抓取。此外,觸覺直接實現(xiàn)了針對物體識別和定位的觸覺探索。眾所周知,提供具有觸覺反饋的主動假體可以有助于減輕幻肢痛(從肢體缺失的感覺),增加對假體的主人翁感并減少控制裝置所涉及的認(rèn)知壓力,實現(xiàn)更自然的行動。
觸覺傳感器可以被并入包圍假肢的手套,或直接固定到機(jī)械部件。在這方面,Sundaram及其同事的設(shè)備技術(shù)可以適應(yīng)各種形狀,以便整合到機(jī)器人或假肢中。目前,主要限制是手套所需的密集傳感器覆蓋的缺點(diǎn)。一個缺點(diǎn)是廣泛的布線,盡管作者使用行和列的設(shè)計來保持這種布線合理的約束。另一方面是記錄壓力圖的速率,根據(jù)應(yīng)用可能需要更高(例如,如果觸覺反饋用于控制機(jī)器人手)。盡管如此,我認(rèn)為目前形式的手套或其改進(jìn)版本為機(jī)器人應(yīng)用提供了令人興奮的前景。
一種新興的機(jī)器學(xué)習(xí)模型已經(jīng)被證明在模仿人類學(xué)習(xí)從經(jīng)驗中執(zhí)行行動的能力方面是有效的,這一過程稱為強(qiáng)化學(xué)習(xí)。在過去的幾年里,研究人員在物體操縱過程中使用了特殊的手套來記錄手部姿勢數(shù)據(jù),并將這些記錄的經(jīng)驗輸入到一個模型中,該模型從這些數(shù)據(jù)中學(xué)習(xí)以產(chǎn)生成功的操作。這種將人類經(jīng)驗轉(zhuǎn)化為機(jī)器人的方法可以從使用Sundaram及其同事的數(shù)據(jù)采集手套中受益。
最后,目前的研究為幾種計算機(jī)視覺模型重新用于觸覺信號處理鋪平了道路,允許應(yīng)用數(shù)十年的計算機(jī)視覺研究。這種方法提供了許多好處,例如消除了涉及模型選擇的各種問題,這些問題在早期階段減緩了深度學(xué)習(xí)的進(jìn)展。因此,Sundaram及其同事的手套可以導(dǎo)致觸覺傳感的快速發(fā)展。我相信手套的低成本將有助于復(fù)制和共享用于制造設(shè)備和數(shù)據(jù)采集設(shè)置的方法。這將促進(jìn)在觸覺傳感研究中使用大型和標(biāo)準(zhǔn)數(shù)據(jù)集,而這目前是計算機(jī)視覺的主要限制因素。
-
數(shù)據(jù)庫
+關(guān)注
關(guān)注
7文章
4020瀏覽量
68365 -
計算機(jī)視覺
+關(guān)注
關(guān)注
9文章
1715瀏覽量
47636
原文標(biāo)題:彌合人工視覺和觸覺之間的差距
文章出處:【微信號:WW_CGQJS,微信公眾號:傳感器技術(shù)】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
Sutherland推出FinAI Hub,助力銀行與金融服務(wù)領(lǐng)域代理型人工智能的產(chǎn)業(yè)化進(jìn)程
Robotiq推出適用于 2F 自適應(yīng)夾爪的觸覺傳感指尖, 為具身智能 (Physical AI) 注入“觸覺”能力

西湖大學(xué):研發(fā)CMOS兼容壓力傳感器陣列,實現(xiàn)精準(zhǔn)觸覺感知功能
松下6mm方形中行程2引腳SMD觸覺開關(guān):設(shè)計與應(yīng)用指南
以觸覺為橋,定義智能體驗——PPS觸覺傳感技術(shù)賦能多領(lǐng)域創(chuàng)新

【道生物聯(lián)TKB-623評估板試用】+遠(yuǎn)距離觸覺馬達(dá)控制
重新定義“觸感”的疆界:觸覺技術(shù)如何從太空走向課堂
人形機(jī)器人傳感器產(chǎn)業(yè)鏈最新分析:力、觸覺、IMU、視覺傳感器為主流!(全面)

利用壓電元件實現(xiàn)觸覺反饋
柔性觸覺傳感器的主要技術(shù)路線
挖到寶了!人工智能綜合實驗箱,高校新工科的寶藏神器
MCU AI/ML - 彌合智能和嵌入式系統(tǒng)之間的差距
維視智造助力高校人工智能和機(jī)器視覺課程落地
研究基于多功能離子纖維傳感器系統(tǒng)的物體識別和抓取的人工觸覺感知



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論