") 哈佛研究人員研發(fā)氣動軟機器人助力太空探索
哈佛研究人員研發(fā)氣動軟機器人助力太空探索

軟機器人保證其更自然,更溫和的自動化方法,但它們經(jīng)常受到復(fù)雜性,成本和電線需求的影響。
值得慶幸的是,哈佛大學的研究人員找到了一種簡化問題的方法。他們開發(fā)了一種由加壓空氣驅(qū)動的softrobot,不需要經(jīng)常引導(dǎo)這些機器的多個控制系統(tǒng)。單獨的輸入通過不同尺寸的管子將空氣泵送到機器人的腿部,這決定了這些腿的行為方式。如果您希望機器人向前爬行,您只需通過正確的管道發(fā)送空氣。
測試機器人只是一個簡單的十字形四足動物,它目前需要一個外部空氣源。
你可能不會馬上就可以在戶外看見這種機器人。然而,精簡的部件可以使其適用于軟機器人各種復(fù)雜任務(wù),例如太空探索或搜索和救援。他們可以在沒有像更脆弱的傳統(tǒng)機器人那樣謹慎的情況下跨越崎嶇地形,并且可以更加實惠 , 如果出現(xiàn)任何問題,可以便宜更換零件和修理,這一點非常重要。
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學習之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
-
機器人
+關(guān)注
關(guān)注
213文章
31075瀏覽量
222199 -
哈佛大學
+關(guān)注
關(guān)注
0文章
10瀏覽量
5254
原文標題:科學家發(fā)明出更簡單的氣動軟機器人可助人類進行太空探索
文章出處:【微信號:IEEE_China,微信公眾號:IEEE電氣電子工程師】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
熱點推薦
高壓放大器成為機器人研發(fā)的“隱形引擎”
從實驗室的靈巧機械手到工廠的力控裝配臂,從太空探索機器人到醫(yī)療手術(shù)器械,高壓放大器——這個曾被視為基礎(chǔ)電力電子的設(shè)備——正成為前沿機器人研發(fā)
【前瞻技術(shù)布局】咖啡機器人:具身智能技術(shù)首階段探索與實踐
一、前言 我是一名京東具身智能算法團隊的研究人員,目前,主要專注在 真實場景真實機器人 下打造一套 快速落地新場景的具身智能技術(shù)架構(gòu) ,聚集機器人操作泛化能力提升,涉及模仿/強化學習、“視覺-語言

探索Xilinx Kria KR260機器人入門套件:開啟機器人應(yīng)用開發(fā)新旅程
探索Xilinx Kria KR260機器人入門套件:開啟機器人應(yīng)用開發(fā)新旅程 在當今科技飛速發(fā)展的時代,機器人技術(shù)的應(yīng)用越來越廣泛。對于電子工程師來說,擁有一款優(yōu)秀的開發(fā)套件至關(guān)重要
探索RISC-V在機器人領(lǐng)域的潛力
探索RISC-V在機器人領(lǐng)域的潛力
測評人:洄溯
測評時間: 2025年11月
測評對象: MUSE Pi Pro開發(fā)板(基于進迭時空K1系列高性能RISC-V CPU)
一、 開篇引言
發(fā)表于 12-03 14:40
高壓放大器在介電彈性體制成的軟機器人研究中的應(yīng)用
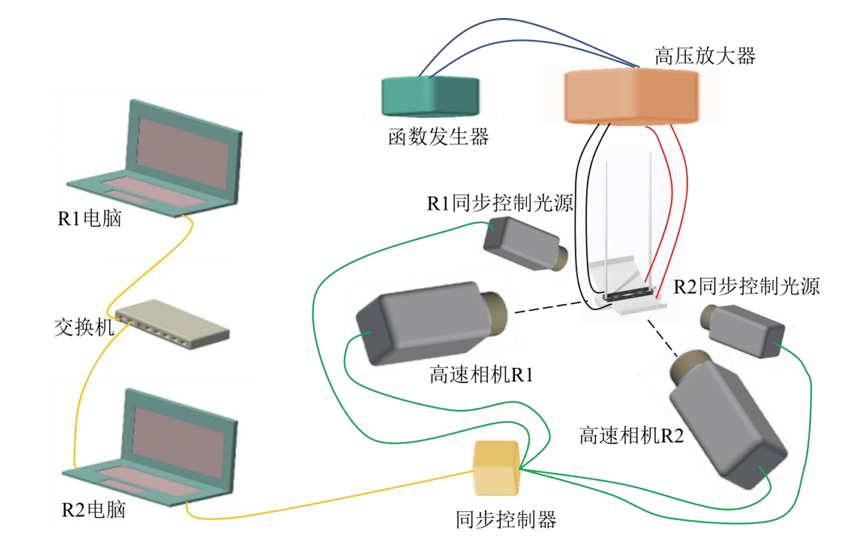
實驗名稱:介電彈性體肌肉制成的受水蛭啟發(fā)的軟機器人研究 研究方向:水蛭運動的特點是吸盤附著和身體收縮交替,在復(fù)雜地形上提供了高度的適應(yīng)性和穩(wěn)定性。在此,首次提出了一種受水蛭啟發(fā)的摩擦電
RK3576機器人核心:三屏異顯+八路攝像頭,重塑機器人交互與感知
。· 多屏顯示:顯示配送狀態(tài)、路徑信息及簡單的觸摸操作界面,方便工作人員監(jiān)控與交互。
開啟您的下一代機器人項目綜上所述,瑞芯微RK3576憑借其卓越的多屏支持、強大的多攝像頭接入能力和高效的低功耗表現(xiàn)
發(fā)表于 10-29 16:41
小蘿卜機器人的故事
經(jīng)過我的申請,
馬老師發(fā)放了,
小蘿卜機器人的,
開發(fā)權(quán)限,
原來的小蘿卜公司,
因為經(jīng)營不善倒閉,
作為科研產(chǎn)品,
幾個技術(shù)對此惋惜,
自掏腰包,
要讓小蘿卜機器人,
再生,
每次聽到小蘿卜說
發(fā)表于 10-23 05:24
如何在NVIDIA Isaac Lab中使用Newton訓練四足機器人
物理在機器人仿真中發(fā)揮著至關(guān)重要的作用,它為機器人在真實環(huán)境中的行為及交互提供了精準的虛擬呈現(xiàn)基礎(chǔ)。借助仿真器,研究人員和工程師能夠以安全、高效且經(jīng)濟的方式訓練、開發(fā)、測試和驗證機器人

機器人競技幕后:磁傳感器芯片激活 “精準感知力”
故障率從 15% 降至 3% 以下。隨著磁隧道結(jié) (MTJ) 等新型技術(shù)成熟,下一代磁傳感器有望實現(xiàn)納米級精度、皮秒級響應(yīng)速度,或使機器人 “高速競速” 最高速度提升 40%;柔性磁傳感器研發(fā)也將讓
發(fā)表于 08-26 10:02
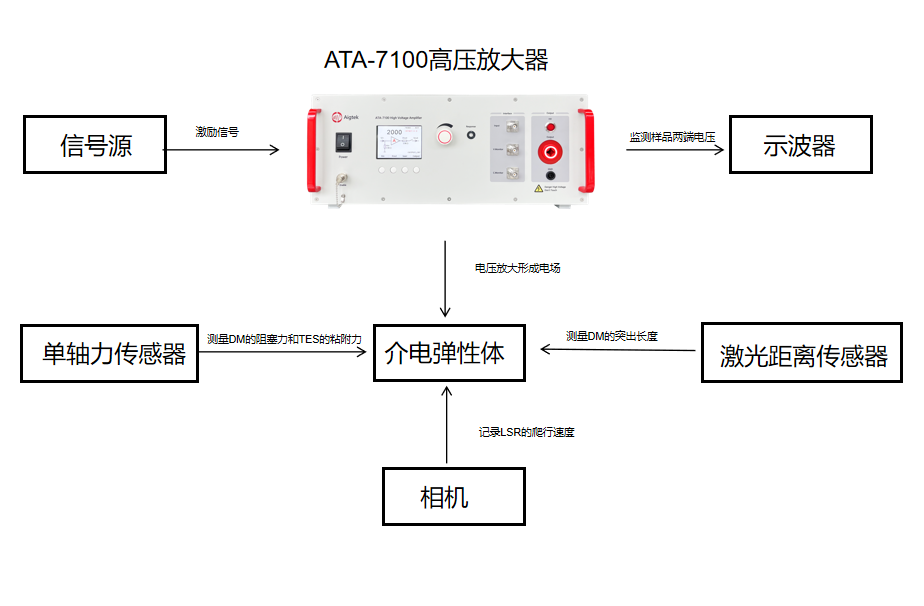
介電彈性體軟機器人研究:高壓放大器的應(yīng)用實踐
實驗名稱:介電彈性體肌肉制成的受水蛭啟發(fā)的軟機器人研究 研究方向:水蛭運動的特點是吸盤附著和身體收縮交替,在復(fù)雜地形上提供了高度的適應(yīng)性和穩(wěn)定性。在此,首次提出了一種受水蛭啟發(fā)的摩擦電

工業(yè)機器人的特點
的基礎(chǔ),也是三者的實現(xiàn)終端,智能制造裝備產(chǎn)業(yè)包括高檔數(shù)控機床、工業(yè)機器人、自動化成套生產(chǎn)線、精密儀器儀表、智能傳感器、汽車自動化焊接線、柔性自動化生產(chǎn)線、智能農(nóng)機、3D 打印機等領(lǐng)域。而智能制造裝備中工業(yè)
發(fā)表于 07-26 11:22
高壓放大器在軟體機器人研究中的應(yīng)用
關(guān)鍵角色,為軟體機器人的驅(qū)動和控制提供了強大的支持。 圖:高壓放大器在介電彈性體制成的軟機器人研究中的應(yīng)用 二、高壓放大器在軟體機器人中的作

輪式移動機器人電機驅(qū)動系統(tǒng)的研究與開發(fā)
【摘 要】以嵌入式運動控制體系為基礎(chǔ),以移動機器人為研究對象,結(jié)合三輪結(jié)構(gòu)輪式移動機器人,對二輪差速驅(qū)動轉(zhuǎn)向自主移動機器人運動學和動力學空間模型進行了分析和計算,
發(fā)表于 06-11 14:30
盤點#機器人開發(fā)平臺
地瓜機器人RDK X5開發(fā)套件地瓜機器人RDK X5開發(fā)套件產(chǎn)品介紹 旭日5芯片10TOPs算力-電子發(fā)燒友網(wǎng)機器人開發(fā)套件 Kria KR260機器人開發(fā)套件 Kria KR260-
發(fā)表于 05-13 15:02
【「# ROS 2智能機器人開發(fā)實踐」閱讀體驗】視覺實現(xiàn)的基礎(chǔ)算法的應(yīng)用
的有效途徑。
結(jié)語
本書第7章和第8章內(nèi)容系統(tǒng)性強,從基礎(chǔ)理論到代碼實踐,為讀者提供了機器人視覺與SLAM的完整知識框架。未來,我計劃結(jié)合書中案例,進一步探索多傳感器融合、自主導(dǎo)航等高級應(yīng)用,爭取在機器人感知領(lǐng)域有更深入的
發(fā)表于 05-03 19:41



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論